荣耀Magic 2 3D感光版来了,和苹果Face ID系统有何不同?
▲点击上方 雷锋网 关注

文 | 赵晨希
来自雷锋网(leiphone-sz)的报道
荣耀手机官方消息显示,荣耀Magic 2 3D感光版于3月7日(今日)正式发售。去年10月31日,荣耀旗舰机Magic 2在北京正式发布。同时,Magic 2额外推出了另一版本的手机3D感光版。
雷锋网了解到,荣耀Magic 2 3D感光版除了搭载最新的3D仿生感光技术,还采用了石墨烯散热技术。荣耀Magic 2 3D感光版存储只有8GB+512GB一个版本配置,价格为5799元。与普通版本三个存储配置不同,即6GB+128GB、8GB+128GB、8GB+ 256GB,售价分别为3799元、4299元、4799元。

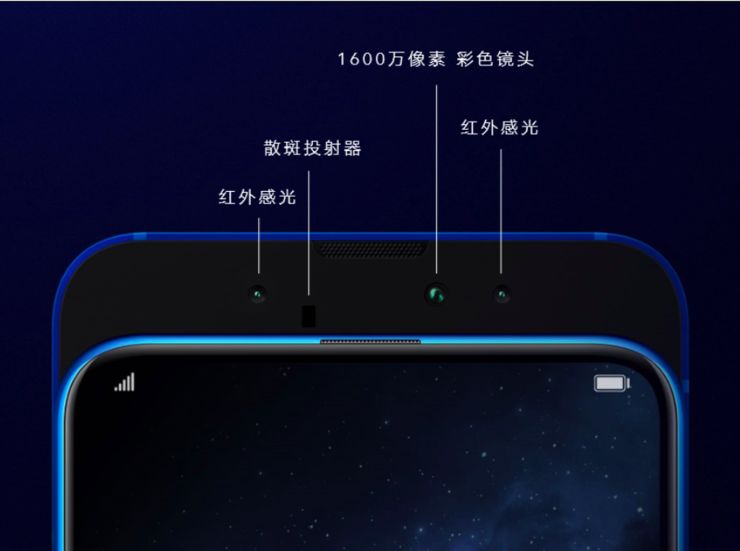
(雷锋网注:荣耀Magic 2 3D感光版产品配置图,来源于荣耀官方)
据荣耀官方资料显示,Magic 2 3D感光版:
前置摄像头:1600万像素彩色镜头(f/2.0光圈)+ 红外感光-200万像素(f/2.4光圈)+ 红外感光-200万像素(f/2.4光圈)+散斑投射器
工作原理:软硬结合,即通过散斑投射器投射出近万个红外散斑,散斑中携带纹理信息,使得人脸有更好的辨识度,仿生双目系统计算出人脸的深度信息,系统同步进行三重防伪AI判别实现3D人脸解锁。
技术解析:记录独有的人脸特征信息,通过AI深度学习模型,做到三重AI防伪。
重防伪:人脸3D特征信息判别(拦截不具备人脸3D特征信息的攻击)
重防伪:机主人脸特征识别 (拦截不具备机主人脸特征的攻击)
重防伪:活体特征检测 (通过真人眼睛、皮肤、鼻尖等在不同光线下的独特反应,来拦截不具备真人活体特征的攻击)
场景方面:支持全天候人脸解锁,3D仿生感光技术识别近万个特征,不仅识别速度更快更精准,而且还消除了人脸识别对光线的依赖,实现了全天候人脸识别,无论在光亮/黑暗环境下,都能精准识别人脸解锁;
3D人脸金融安全支付;基于人脸的隐私保护;应用锁(你的应用只认你的脸);文件保密柜(你的文件只认你的脸);3D人脸支付;3D活体检测;全安全环境数据处理;支持支付宝认证。
敲黑板:这么多技术怎么区分?
众所周知,目前深度相机按照其工作原理不同,可以分为三种:TOF(Time of flight,飞行时间技术)、RGB双目以及结构光技术。2017年9月,苹果iPhone X发布,首先摒弃指纹识别技术,采用3D(散斑)结构光人脸识别技术。接着,国内手机厂商OPPO、小米开始跟进,纷纷采用3D结构光,作为手机生物识别功能的核心技术。
首先,雷锋网为读者区分一下TOF(Time of flight,飞行时间技术)、RGB双目、结构光技术三种技术的差别:
TOF(飞行时间):通过向目标物体连续发射光脉冲,再通过传感器,接收从目标物体反射回的光。光速是已知的,所以,通过计算光脉冲飞行往返的时间,就可以得到物体不同位置的深度信息(距离)。目前,市面上的手机采用TOF技术的有vivo NEX、三星折叠屏手机Galaxy Fold。
RGB双目:顾名思义,就是通过两个像“眼睛”一样的相机,拍摄不同的照片,得到视差计算出深度信息。深度双目相机里可分为两种,一种是被动式(双RGB,即两个彩色摄像头),另一种是主动式(双IR,IR是红外线Infrared Radiation的简写)。
结构光:同TOF一样,也利用了光学原理。通过激光器,将有一定结构特征的光线投射到目标物体上,再通过红外摄像头进行信息采集。由于目标物体位置不同深度信息不同,所以采集到的图像相位信息不同,再通过计算得出3D模型。苹果、OPPO、小米均采用的是结构光技术。
当然,3D结构光也有不同类型。例如,苹果iPhone X、OPPO Find X采用的是散斑3D结构光,小米8探索版采用的是Mask(掩膜)的编码结构光。据雷锋网了解,两者技术来源不同,参见雷锋网此前报道OPPO Find X 背后的独角兽,奥比中光的进化之路才刚刚开始:
苹果iPhone X技术源自,2013年苹果公司以3.45亿美金在以色列全资收购的Prime Sense公司。OPPO技术来自于供应链奥比中光。散斑结构光的方式是打出3万个离散分布的红外点阵进行深度探测。
小米8探索版技术源自,以色列Mantis Vision公司自主研发的技术。集微网此前报道显示,Mantis Vision采用基于掩膜的编码结构光,通过创新的专利编码技术,获取深度信息。面部呈现出了规律性的几何编码图形,如此可以快速匹配特征点,减少3D信息计算量,降低结构光算法功耗。另外,配合相机的高帧率,还可以实现 3D 内容的实时动态捕捉。
散斑与编码结构光的区别:编码结构光不需要采用DOE(衍射光学元件Diffractive Optical Elements),镜头也只需要塑料的投影镜头即可。具体工作原理为是,Vcsel激光器均匀照射掩膜(Mask),由掩膜形成上万个明暗相间的图形,再经过投影镜头投射出去,投射过程中要做反畸变的处理。其优势在于结构简单,但缺点在于功耗较大。
下面,雷锋网重点一下介绍苹果iPhone X散斑3D结构光技术工作原理:
苹果iPhone X前置摄像头TrueDepth相机是,700万像素的CMOS传感器,其他依次为Flood illuminator(泛光感应元件)、Infrared camera(红外摄像头)、Proximity sensor(接近感应器)、Ambient light sensor(光度感应器)、Dot projector(点阵投影器),以及Speaker(扬声器)、Microphone(麦克风)。

整个工作流程为:当目标物体靠近手机时,Proximity sensor(接近感应器)会检测到动态信息,启动Flood illuminator(泛光感应元件),发出非结构(Non-structured)的红外光,Infrared camera(红外摄像头)进行接收,传送到手机处理器中进行AI解析,启动Dot projector(点阵投影器)发射3万个结构光(Structured)投射到面部,这些阵列再次反射回Infrared camera(红外摄像头)中,最后计算出深度信息。
划重点:荣耀的3D仿生感光技术是什么?
那么,问题来了,荣耀Magic 2 3D感光版用的什么技术呢?荣耀官方资料显示,荣耀Magic 2 3D感光版使用3D仿生感光技术。
并且对比了与结构光技术的核心区别:
都使用三角定位原理。
结构光完全依赖于散斑投射进行深度计算,3D仿生感光技术使用仿生双目进行深度计算,散斑投射用于提升深度精度。
荣耀方面对比苹果、OPPO FIND X的结构光方案,在体验上得出结论:解锁速率和体验相当。

其实,所谓的3D仿生感光技术就是结构光与RGB双目两种技术的混合。具体参见雷锋网上图的图示,两个红外摄像头IR即是RGB双目技术(注意:双IR是主动式),散斑投射器与红外感光两者是结构光。荣耀的RGB摄像头用于自拍。双红外摄像头IR+散斑投射器是深度感知,用于人脸识别、建模等3D应用。
荣耀方面对雷锋网的回复显示,深度计算以及人脸识别均没有用到RGB摄像头,RGB摄像头仅用于自拍。三个摄像头是RGB+两个红外IR摄像头,两个红外IR摄像头用于计算深度信息,红外摄像头用于补光作用。
一位业内专家对雷锋网表示,RGB双目主动双摄的优势是,相对被动双摄,可以解决低光、弱纹理等场景的深度计算问题。如果是双目+结构光,好处就是,把结构光的高精度深度信息和双目深度的高完整度的优势结合起来,这样结合互补,可以输出高精度、高稠密完整的深度信息。
当然,不管是结构光与RGB双目两种技术的混合,还是3D结构光均涉及荣耀自研技术。而在去年荣耀赵明接受媒体采访时,也表示目前只有苹果、华为两家厂商使用的3D结构光技术,属于自己研发的技术。
- END -
◆ ◆ ◆
推荐阅读
孟晚舟引渡听证会延期;马化腾谈滴滴事件:切忌一刀切;熊猫直播被曝破产
多年后,面对聊天宝,罗永浩再也想不起自己口中的理想主义
子弹短信团队宣布解散;多平台iPhone再降价促销;福布斯2019榜单:前20有马化腾没马云
360集团技术总裁、首席安全官谭晓生宣布离职






