基于动态吸振原理的轮边电驱动机构设计和优化|厚势汽车

作者:唐廷举 陈辛波 唐星宇
来源:同济大学汽车学院(同济智能汽车研究所)
编辑:啜小雪
入群:加微信号autoHS,入厚势汽车科技群与行业专家讨论更多信息
摘要:针对传统分布式电动汽车簧下质量大,车辆平顺性和车轮接地性恶化的问题,本文提出利用动态吸振原理来抑制分布式电驱动车辆的振动。对驱动电机充当吸振质量块的轮边电驱动机构进行构型综合与分析,建立振动微分方程和 MATLAB 模型,利用遗传算法以车身垂向加速度和相对动载荷为优化目标,优化机构尺寸和电机悬置的刚度阻尼。结果表明:基于动态吸振原理的轮边电驱动机构可以使得分布式电驱动的车身加速度比集中驱动更小,车轮动载荷与集中式驱动接近,能有效抑制传统分布式电驱动的簧下质量负效应。
关键词:轮边电驱动系统 动态吸振 机构综合 参数优化
随着能源、环境问题显现及加剧,电动汽车作为一种清洁节能的交通工具,受到越来越多的关注。电动汽车中分布式驱动方式由于传动链短、效率高、结构简单、机动性高等优点广受关注。但是作为典型的分布式驱动方式,轮毂电机和轮内电机减速驱动[1],因为会增加簧下质量,影响整车的接地性能、平顺性和操纵稳定性[2],迟迟未能得到广泛应用。国内外针对电机造成的簧下质量负效应做了广泛的研究,分别提出了质量转移、轻量化和主动悬架等方式抑制其负效应[3]。
普利司通公司开发了动态吸振型轮毂电机,该电机定子和转子之间留有较大间隙,定子通过弹性元件与转向节相连可以上下振动,其仿真分析表明采用该系统的整车平顺性得到很好提升;但是该结构过于复杂,并需要特殊结构的电机,降低了系统动力传递效率,且提高了成本。法国米其林公司提出主动车轮方案,其使用两个电动机,其中一个向车轮输出扭矩,另一个用于控制主动悬架系统,从而减小非簧载质量负效应[4-5];但该方案结构复杂、能耗大、成本高。还有将电机偏置并与单摆臂悬架集成的方案[6],但对于双横臂悬架和一些复杂的多连杆悬架,应用时受到限制。本文提出利用动态吸振原理来降低分布式电驱动车辆振动的方法,对既能有效传递动力又能让电机作为吸振质量块吸收车辆振动的轮边电驱动机构进行构型综合与分析,同时利用遗传算法优化机构的尺寸参数和悬置电机的刚度阻尼值[7]。
1.驱动机构型综合
在对基于动态吸振原理的轮边电驱动机构进行设计时,可以根据电机悬置的位置是转向节还是车身可以分为两类,它们都需要满足下面两个条件:
(1)电机与车轮之间的运动副要能够有效的传递电机动力。
(2)电机和转向节或者车身之间要设计移动副安装弹簧和减震器。
1.1电机悬置于转向节的驱动机构型综合
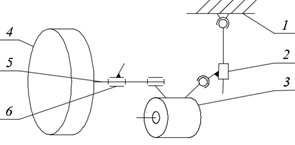
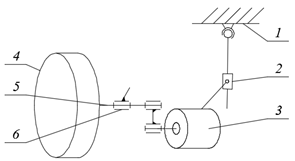
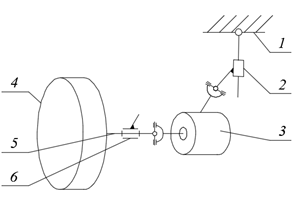
电机悬置于转向节时,由于车身对电机没有直接作用力,不会和悬架导向机构产生运动学干涉,所以可以采用简单的平面机构来悬置电机。电机竖置时,动力传递方向与电机跳动方向一致,可以采用滑动花键传动,得到的机构如图 1。电机横置时,可以利用齿轮连杆机构传递动力,如果采用曲柄滑块机构悬置电机,得到的机构如图 2;如果采用曲柄摇块机构悬置电机,得到的机构如图 3。
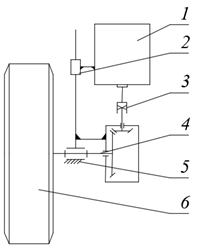
1 驱动电机;2 安装弹簧和减震器的移动副;3 滑动花键;
4 驱动轴;5 转向节;6 车轮
图1 机构1简图
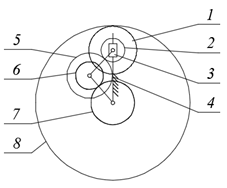
1 驱动电机;2 第一级主动齿轮;
3 安装弹簧和减震器的移动副;4 转向节;5 第一级从动齿轮;
6 第二级主动齿轮;7 第二级从动齿轮;8 车轮
图2 机构2简图
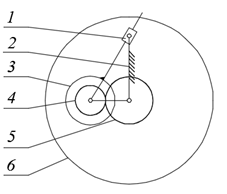
1安装弹簧和减震器的移动副;2转向节;3驱动电机;
4主动齿轮;5从动齿轮;6 车轮
图3 机构3简图
1.2电机悬置于车身的驱动机构型综合
车辆悬架导向杆系普遍采用空间机构,同时杆系铰接点都采用橡胶衬套连接,橡胶衬套随车轮的受力变化会产生不同的变形,因此车轮和转向节相对车身是六个方位的空间运动。所以当电机悬置于车身时,传动链和电机悬置装置组成的从车身到转向节的单开链就要有八个自由度,其中六个自由度用来适应车轮的空间跳动,一个自由度用来让电机上下跳动吸收车辆的振动,一个局部自由度来传递电机动力。
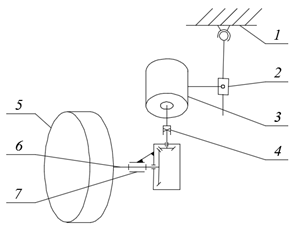
如果电机和转向节之间的相对运动用转动副实现,可得到如图 4 和图 5 所示机构,因为机构中电机和驱动轴的中心距不变,所以可以采用齿轮、带轮和链轮等方式减速传动。机构 4 和机构 5 的区别是机构 5 的电机在上下跳动时不会随减速箱一起摆动,摆动部分的转动惯量小。
1 车身;2 安装弹簧和减震器的移动副;
3 驱动电机;4 车轮;5 驱动轴;6 转向节
图4 机构4简图
1 车身;2 安装弹簧和减震器的移动副;
3 驱动电机;4 车轮;5 驱动轴;6 转向节
图5 机构5简图
如果电机和转向节之间的相对运动用万向节实现,可得到如图 6 所示机构。
1 车身;2 安装弹簧和减震器的移动副;
3 驱动电机;4 车轮;5 驱动轴;6 转向节
图6 机构6简图
如果电机和转向节之间的相对运动用滑动花键实现,可得到如图 7 所示机构。
1 车身;2 安装弹簧和减震器的移动副;
3 驱动电机;4 滑动花键;5 车轮;6 驱动轴;7 转向节
图7 机构7简图
1.3机构对比和结构设计
通过对基于动态吸振原理的轮边电驱动机构型的研究,综合得到了上面七种机构,在不同的应用需求下它们都有各自的优势,例如:如果采用大功率密度电机,将其悬置于转向节,则电机、传动件和转向节可以集成为一个模块,便于安装;采用万向节将电机悬置于车身,可以使用大扭矩、低转速电机直接驱动,无需减速装置。本文基于下面 4 点考虑,选用机构 4 作为设计优化对象。
(1)转向节上布置有制动钳和悬架导向机构的铰接点,空间狭小,所以电机悬置于转向节布置难度更大。
(2)目前电动汽车广泛采用高转速低转矩电机驱动,需要减速装置。
(3)斜齿轮传动效率高、噪声小,汽车上广泛应用。
(4)机构 5 虽然比 4 转动部分转动惯量小,但是电机悬置的下铰接点随电机同步运动,不受车轮跳动的直接影响,仿真对比发现,机构 4 的吸振性能更好。
为了验证机构 4 布置的可行性,将其应用于双横臂悬架,进行三维建模,如图 8。电机和减速箱固连。悬置电机的弹簧和减震器同轴竖置布置,以充分利用弹簧减震器的刚度和阻尼。减震器上端通过球铰连接车身,下端通过球铰连接电机壳体。弹簧和减震器前后位置变化会影响吸振性能,所以不一定布置在电机正上方。同时由图 8 可见通过合理的布置,电机和减速箱不会与悬架导向杆系干涉,而且使得轮边空间利用率大大提高。
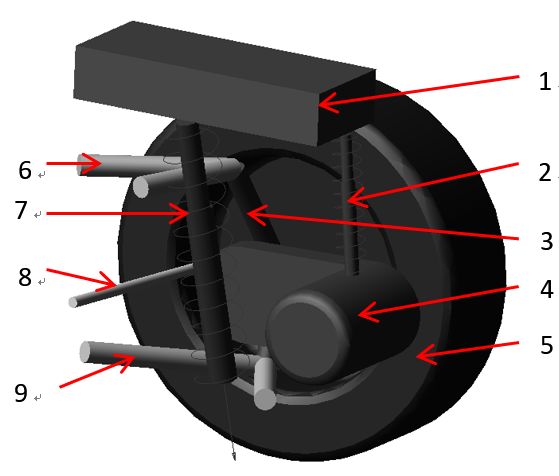
1车身;2电机悬置弹簧和减振器;3转向节;
4电机和减速箱;5车轮;6上控制臂;
7悬架弹簧减振器;8转向横拉杆;9下控制臂
图8 机构4三维简化模型
2.机构参数优化和性能对比
2.1动力学建模
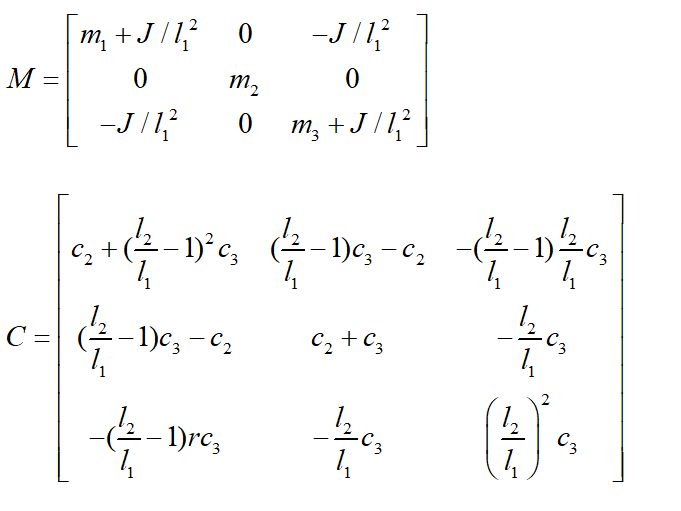
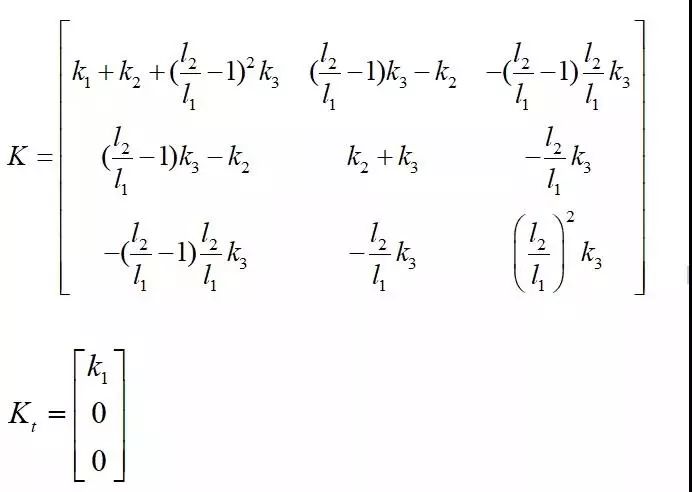
虽然车轮的跳动为空间运动,但是主要运动为垂向跳动,为了方便分析将机构 4 简化成平面机构。同时假设车辆的悬架质量分配系数为 1,前后悬架系统的垂向振动是独立的,于是可以得到图 9 所示的三自由度四分之一车辆振动模型。参考文献[8]电机转矩波动对整车垂向性能影响较小,以及后面的仿真工况为匀速行驶,所以模型的外界激励没有包含电机反转力矩。图中 z1、z2、z3 分别为车轮、车身和电机的垂向位移,q 为路面垂向激励,m1、m2、m3 分别为簧下质量、簧上质量、电机和减速箱的质量,J 减速箱和电机的转动惯量,k1、k2、k3 分别为车轮、悬架和电机悬置的刚度,c2、c3 分别为悬架和电机悬置的阻尼,车轮阻尼较小忽略不计。
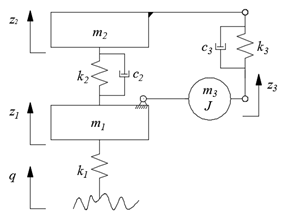
图9 三自由度振动模型
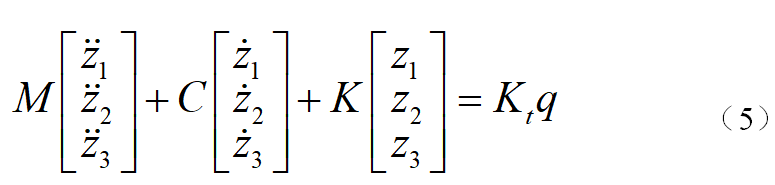
选取车轮位移 z1、车身位移 z2、电机质心位移 z3 作为广义坐标,根据拉格朗日方程建立系统运动微分方程,拉格朗日方程、系统动能、耗散能和弹性势能分别为式 1、式 2、式 3 和式 4。由式 1 推出三自由度模型振动微分方程式,如式 5。
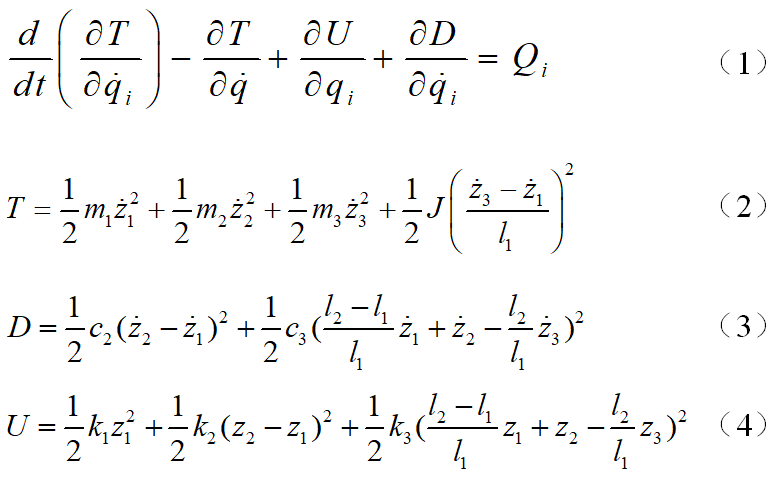
式中
I1—电机和减速箱的质心到摆动中心的距离,m
l2—电机悬置位置到电机和减速箱摆动中心的距离,m
式中
q—随时间变化的路面随机激励[9-10]

式中
u—车速,m/s
n00—下截止频率,取0.011m-1
n0—参考空间频率,取0.1 m-1

W(t)—均值为零的滤波白噪声
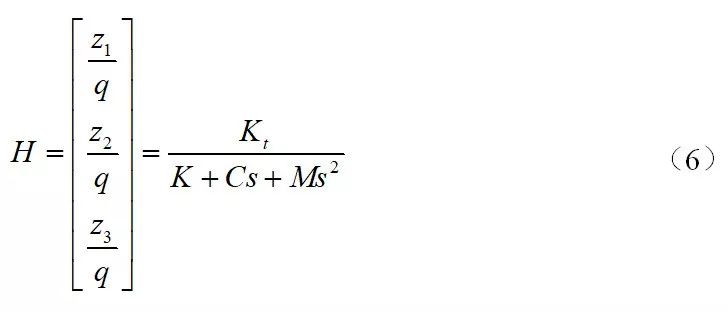
对式(5)进行拉氏变换,得到输出位移对路面输入的传递函数,如式 6 所示。
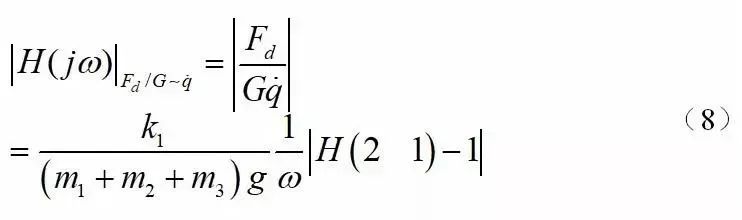
对式 6 进行运算,可得到车身加速度、相对动载荷对路面速度输入的幅频函数,如式 7、式 8。

2.2 基于遗传算法的参数优化
本方案中可优化的参数有电机悬置刚度 k3、阻尼 c3、电机和减速箱质心到摆动中心的距离 l1、电机悬置位置到摆动中心的距离 l2。电机驱动时会产生较大的反扭矩,为避免电机撞击车身或者路面,电机悬置的刚度不能太低,将 k3 的取值范围定为 20000~40000N/m,c3 的取值范围定为 200~3000N·s/m,根据空间布置的限制 l1 的取值范围定为 0.15~0.3m,l2 的取值范围定为 0.1~0.6m。优化指标选用车身加速度均方根值和相对动载荷均方根值,分别用式 9、式10计算[11-12]。
由于车身加速度均方根、相对动载荷均方根两个性能指标无法同时最小,采用式 11 进行综合评价。

式中
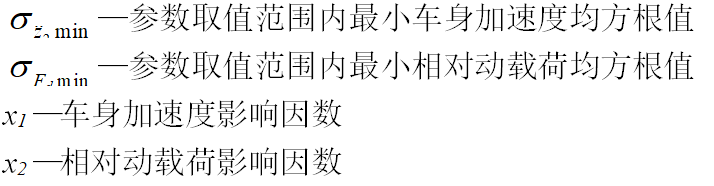
考虑到本方案目的主要是减少相对动载荷,将相对动载荷的影响因数 1 取 x2 取 0.4。仿真过程中使用的车辆参数如表 1.
表1 车辆参数列表
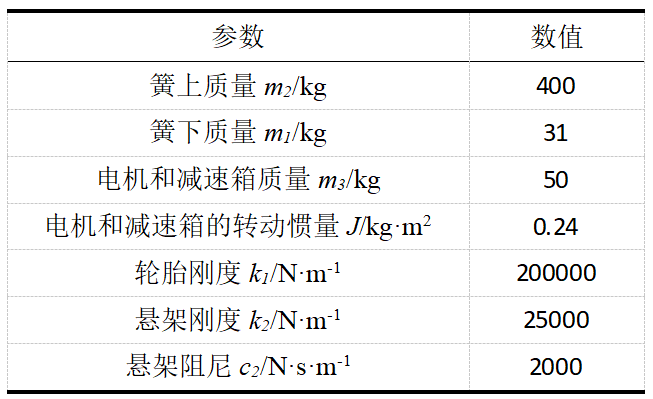
在 MATLAB 中编程得到综合性能关于四个优化变量的函数,再利用 MATLAB 内部的遗传算法模块进行参数优化,优化结果为当 k3 取 36000N/m、c3 取 436N·s/m、l1 取 0.3m、l2 取 0.56m 时,综合评价指标最优。
2.3 不同驱动方式性能对比
为了验证基于动态吸振原理的轮边电驱动方案的性能,将集中驱动、轮毂电机、动态吸振三种驱动方式进行仿真对比。仿真时,集中驱动的电机和减速箱的质量属于车身,轮毂电机驱动的电机质量属于簧下质量。
仿真求得三种驱动方式的车身加速度对 q 的幅频特性、相对动载荷 Fd /G 对 q 的幅频特性[13-14],分别如图 10、图 11。
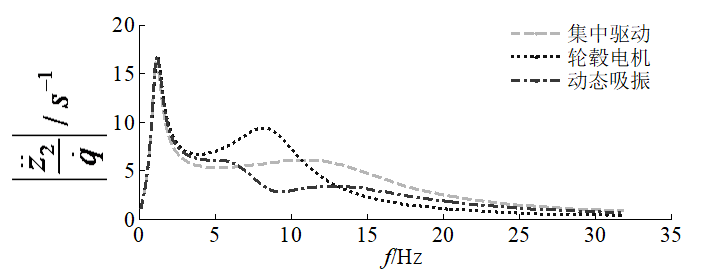
图10 车身加速度对q的幅频特性
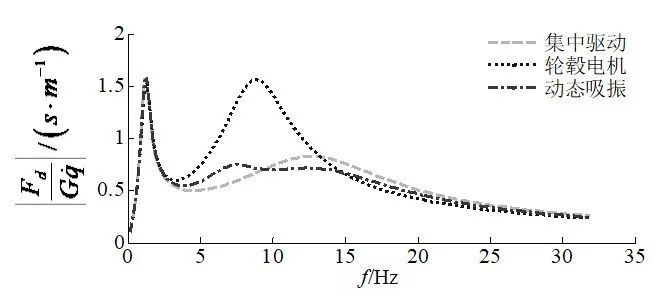
图11 相对动载荷对q的幅频特性
从图 10 和图 11 可以看出:三种驱动方式的车身加速度和相对动载荷在第一阶主频率处都有一个大的峰值,这是车身共振导致的;轮毂电机驱动的车身加速度和相对动载荷在第二阶主频率处的峰值都很大,特别是相对动载荷远远的大于了集中驱动在第二阶主频率处的幅值;动态吸振方案由于引入了第三阶振动主频率,相比于轮毂电机驱动明显降低了车身加速度和相对动载荷在第二阶主频率处的峰值;动态吸振方案的车身加速度在频率大于 7Hz 时,幅值明显小于集中驱动。
仿真求得三种驱动方式在 B 级路面上以时速<span style="margin: 0px;font-family: " new="" times="" 10.5pt;"="">60km/h 行驶的车身加速度和相对动载荷的时域响应曲线,分别如图 12 和图 13。
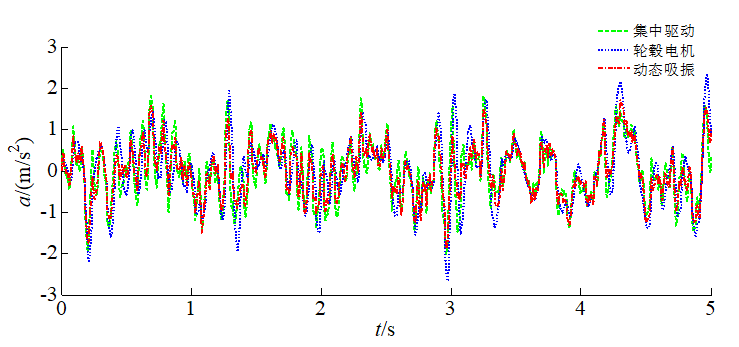
图12 车身加速度时域响应
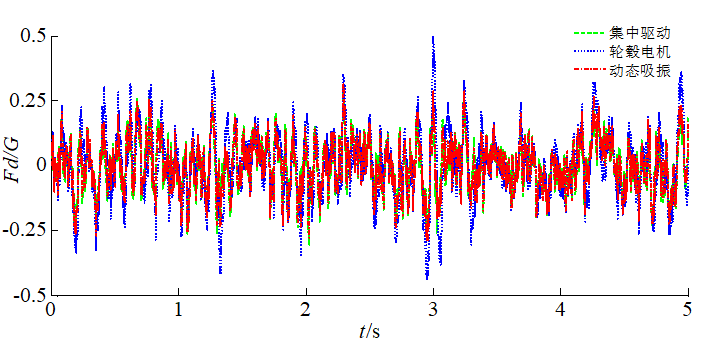
图13 车轮对动载荷时域响应
从图 12 可以看出:轮毂电机驱动的车身加速度幅值最大,其次是集中驱动,最小是动态吸振方案。从图 13 可以看出:轮毂电机驱动的相对动载荷幅值最大,动态吸振和集中驱动相近。
将三种驱动方式的时域响应积分,求得它们的车身加速度和相对动载荷的均方根,如表 2。轮毂电机驱动的车身加速度均方根比集中驱动大 14%,相对动载荷均方根比集中驱动大 30%;动态吸振方案的车身加速度均方根比集中驱动小 5%,相对动载荷均方根和集中驱动相同。
表2 三种驱动方式性能值
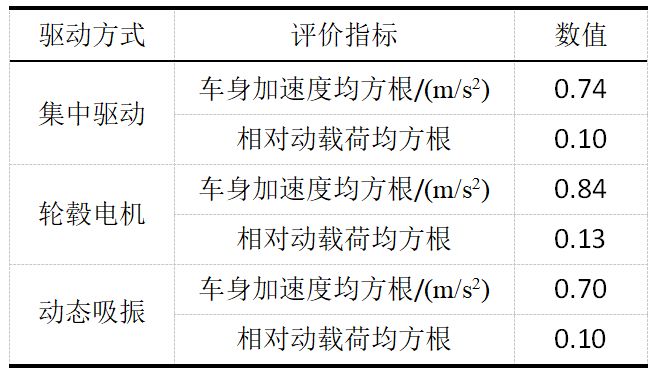
综合上面的对比分析得出:基于动态吸振原理的轮边电驱动方案成功地解决了传统分布式驱动车辆平顺性和车轮接地性差的问题,甚至相比于集中驱动还进一步提高了车辆的平顺性。
3.结论
本文设计了七种基于动态吸振原理的轮边电驱动机构,它们都把电机布置在轮边,保留了传统分布式驱动传动链短、占用空间小、效率高等特点。对最容易实现、性能最好的驱动机构进行了结构设计和参数优化。
仿真对比结果显示基于动态吸振原理的轮边电驱动方案成功抑制了传统分布式电驱动的簧下质量负效应,甚至比集中式驱动都提高了车辆的平顺性。因此基于动态吸振原理的轮边电驱动方案具有较大的实用和推广价值。
参考文献
[1] KAMIYA K, OKUSE J, OOISHI K. Development of in-wheel motor system for micro EV[C] //Proc.18th Int. Electric Vehicle Symp, 2001.
[2] 汪志强. 轮毂电机对车辆操纵稳定性和平顺性的影响研究[D].吉林大学汽车工程学院 吉林大学,2014
WANG Zhiqiang. Effect of wheel hub motor on vehicle ride comfort and stability [D]. Jilin University automotive engineering school Jilin University, 2014
[3] 宁国宝. 轮边驱动系统垂向振动负效应的抑制方法研究[D]. 同济大学汽车学院 同济大学,2006.
NING Guobao. The research of the method to restrain the negative effect of close wheel drive system[D]. Automotive school, Tongji university,2006.
[4] 海棠. 电动汽车革命性技术的创新设计米其林"主动车轮"新技术[J].汽车与配件,2009,(52):36-37.
HAI Tang. Revolutionary design for EV Michelin “Active Wheel” [J]. Automobile &Parts, 2009, (52): 36-37.
[5] Nagaya G, Wakao Y, Abe A. Development of an in-wheel drive with advanced dynamic-damper mechanism [J]. JsaeReview, 2003, 24(4): 477-481.
[6] 陈辛波,卢志坚,唐峰,等. 一体化单纵臂减速式轮边电驱动系统仿真分析[J].机电一体化,2011,(9):22-28.
CHEN Xinbo, LU Zhijian, TANG Feng; Simulation and analysis of an integrated electric wheel drivesystem with reducer for single trailing arm [J]. Mechatronics, 2011, (9): 22.
[7] 陈辛波,王叶枫,王威,等. 基于曲柄滑块机构的轮边驱动系统方案研究[J].振动与冲击,2016,(18):46-51.
CHEN Xinbo, WANG Yefeng, Wang Wei. Research and design of a new type of close wheel drive system using motor as dynamic absorber and gear-linkages [J]. Journal of Vibration and Shock, 2016, (18): 46-51.
[8] 刘浩,钟再敏,敬辉,等. 分布式驱动电动汽车轮边电机传动系统动态特性仿真[J]. 汽车工程,2014,(5):597-602.
Liu Hao, Zhong Zaimin, Jing Hui. Simulation on the dynamic characteristics of in-wheel-motor powertrain system in distributed drive electric vehicle [J] . Automotive Engineering , 2014, (5): 597-602.
[9] 谭迪,罗玉涛,叶志伟,等. 内置悬置轮毂电机驱动系统参数灵敏度分析[J]. 华南理工大学学报,2013,(5):131-137.
Tan Di, Luo Yutao, Ye Zhiwei. Parameter sensitivity analysis of in-wheel motor drive system withrubber bushings [J]. Journal of South China University of Technology, 2013, (5): 131-138.
[10] 吴光强,黄焕军,叶光湖. 基于分数阶微积分的汽车空气悬架半主动控制[J]. 农业机械学报,2014,(07):19-26.
Wu Guangqiang, Huang Huanjun, Ye Guanghu. Semi-active control of automotive air suspensionbased on fractional calculus [J]. Transactions of the Chinese society for Agricultural Machinery, 2014, (07): 19-26.
[11] 余志生. 汽车理论(第5版)[M]. 北京: 机械工业出版社,2009.
YU Zhisheng. Automobile theory [M]. BeiJing: China Machine Press, 2009.
[12] 靳晓雄,张立军,江浩. 汽车振动分析[M]. 上海: 同济大学出版社,2002.
JIN Xiaoxiong, ZHNAG Lijun, JIANG Hao. Auto vibration analysis [M]. Shanghai: Tongji University Press, 2002.
[13] 王若尘,陈兵,张孝良,等. 车辆蓄能悬架系统仿真与试验[J]. 农业机械学报,2012,(12):1-4.
Wang Ruochen, Chen Bing, zhang Xiaoliang. Simulation and experiment of vehicle inerter suspension system [J]. Transactions of the Chinese society for Agricultural Machinery, 2012, (12): 1-4.
[14] 魏建华,杜恒,方向,等. 基于ADAMS/SIMULINK/AMESIM的油气悬架道路友好性分析[J]. 农业机械学报,2010,(10):11-17.
Wei Jianhua, Du Heng, Fang Xiang. Road-friendliness of interconnected hydro-pneumatic suspension based on ADAMS/SIMULINK/AMESIM [J]. Transactions of the Chinese society for Agricultural Machinery, 2012, (12): 11-17.
-END-
文章精选
智能驾驶
新能源汽车
项目和评论
这些大神从Google出走,创办了五家(命运各异的)无人车公司
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
sasa@ihoushi.com

点击阅读原文,查看文章「康奈尔大学:一种用于测试自动驾驶深度学习的工具DeepTest」