基于车路协同的群体智能协同
1周前

基于车路协同的复杂新型交通系统与传统交通系统不可同日而语,新型的交通系统的来临,使我们面临众多挑战,我们必须采用群体智能协同控制的方式来解决开放的复杂的交通系统面临的交通管控问题。
今年9月份,阿里巴巴、百度等一些大的互联网公司先后发布了车路协同的战略发展目标和计划,大公司这样的一个动作就突然把原来各研究机构逐步发展的车路协同技术推向高潮。有人预测2018车路协同在市场上这样的一个启动,很可能会在2019年成为发展风口,车路协同的大规模应用和推广已经成为现代道路交通发展的必然选择,但是目前还是会面临一系列基础研究的问题。
2011年科技部在863计划设立主题项目“智能车路协同关键技术研究”。这也是“车路协同”名词的来源。
“863”计划:1986年3月,面对世界高技术蓬勃发展、国际竞争日趋激烈的严峻挑战,邓小平同志在王大珩、王淦昌、杨嘉墀和陈芳允四位科学家提出的“关于跟踪研究外国战略性高技术发展的建议”和朱光亚极力倡导下,做出“此事宜速作决断,不可拖延”的重要批示。在充分论证的基础上,党中央、国务院果断决策,于1986年11月启动实施了高技术研究发展计划,简称863计划。
发展车路协同技术及其应用已纳入交通部智能交通系统发展战略。
目前国家的在建项目有:新一代国家交通控制网和智慧公路试点工程/北京冬奥会、雄安新区项目等。
清华大学教授/自动化系工程研究所所长、国家“863”计划先进交通技术领域专家张毅率领的团队自2011年就开始了车路协同技术的研究,本文是对他在国家智能产业峰会报告的整理。
车路协同与智能协同
车路协同系统i-VICS (Intelligent Vehicle Infrastructure Cooperative Systems)是采用先进的无线通信和新一代互联网等技术,全方位实施车车、车路和人车动态实时信息交互,在全时空动态交通信息采集与融合的基础上,开展车辆协同安全和道路协同控制,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统。
核心技术与功能有:①任何车辆任何时间任何地点互联;②全时空动态交通信息采集与融合;③人车路的有效协同--协同安全(分为主动安全和被动安全)、协同控制(分为主动控制和被动控制)。
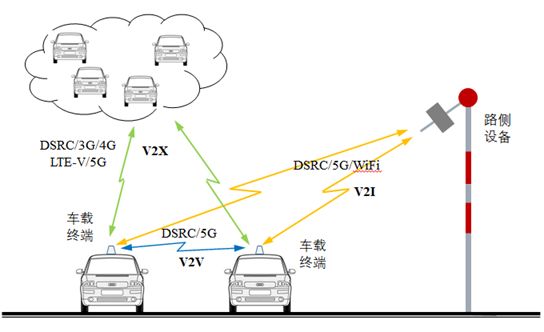
车路协同系统结构
从上图可以看出,系统通过各种无线通讯的方式,把车和车之间、车和路之间、近端和远端车之间、甚至人都可以构成新的交通结构。
这里几个关键点:车载设备、人手持设备、路测设备构成一个新的结构,结构的功能有:
设备性能:多模兼容
环境感知:协同感知
信息交互:可信交互
控制机制:动态分层
计算实现:边缘云端
系统功能:升级延展
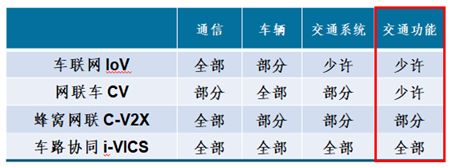
这些结构组合在一起将产生非常大的变化,比如信息或获取产生的革命性的变化,于是我们在思考问题的时候就不能再用传统的方式来做,因此不同的领域做交通的同仁们就开始思考这个问题。于是大家回忆国内近十年的发展过程,有些高频词是比较常见的,比如车联网(Internet of Vehicle)、网联车(Connected Vehicle)、蜂窝网联(C-V2X)以及车路协同(i-VICS)方式。
当然,最后交通部选择了“车路协同”这个名称,这其实也跟我们的国家的体制有关系,因为不同领域的叫法是从它的角度出发的。
虽然这几个方面出发点是不一样的,比如车联网最早的发展是从物联网出来的的,把车连起来就可以做,但是车联网用到汽车里最早的是从娱乐开始的,希望汽车在行驶过程中通过网络传递娱乐的信息。这个市场没有打开,发展过程中,大家发现车联网更大的应用是在交通里面,于是车联网就变成和交通结合。
从这个例子中可以看出,出发点虽然可能不一样,但是目前主要研究的领域都趋同了。
交通部副部长刘小明在去年电动汽车百人会上说:交通运输部高度重视自动驾驶和车路协同等前瞻性技术的发展和应用,以智慧交通建设为载体,按照车路协同发展的技术路径,积极推进自动驾驶的发展。
因此,我们国家高度重视自动驾驶和车路协同发展,这个技术路线确定了按照车路协同的技术路径积极地推动自动驾驶的发展。即我们现在的所说的自动驾驶以单车为智能体解决通过单车对环境的感知解决控制的问题要发生一些变化,走到另外一个技术路线,就是依赖于我们现在说车路协同的平台,对自动驾驶汽车的原理性、控制的手段问题、系统的结构问题都会产生一些变化。
比如说举一个简单的例子自动驾驶有一个挑战是,过路口的时候要识别红绿灯,但是会受到很多因素的影响如光照和遮挡等。众所周知,视频的识别可靠性最后的5%是很难提高的,但是如果这5%提高不上去对于自动驾驶车辆通过路口就很困难。
但是车路协同平台就可以解决这样的问题,信号控制系统作为车路协同平台中间作为一种典型的传感器,可以把它信号发送出来,如果信号机能够把红灯和绿灯的状态以及时间直接发给自动驾驶汽车,就可以代替通过视频判别信号灯的过程,就可以解决所谓最后5%准确率的问题。
即不同的技术路线可以大大提高对交通可靠性要求,同时可以降低对一种技术的依赖性。
这样还可以极大的解决成本的问题,比如我的团队,从买车再改装到上路40万就可以解决了。一年的经验,70多万就可以解决两辆自动驾驶汽车。但是有一个重要的前提就是基础设施要支持我们的自动驾驶汽车。
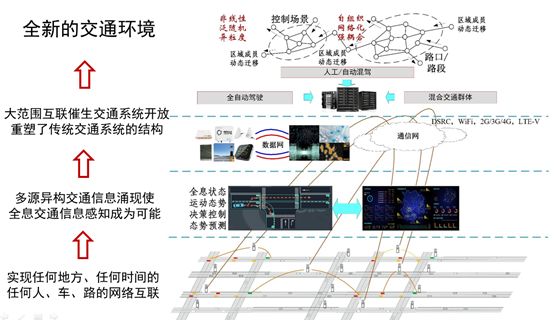
车路协同条件下的道路交通环境促使我们改变对传统交通系统的认知
在这样情况下,新的挑战也随之而来,如上图所示路网及所有道路上车辆连起来以后,使得传统的交通里面只能依靠简单断面来推演整个交通系统的时代过去了。
现在通过车路协同系统可以知道任何时间、任何断面交通情况,任何车辆信息都可以获取。
于是再这样的情况下产生海量的信息,包括信息安全的问题。
在这个基础上还会发现一个很重要的问题,就是全面信息扑面而来以后,我们发现系统结构也会发生变化。即有了这样一个结构以后,我们发现交通系统里面就没有边界了。我们知道我们控制的系统目标应该是固定的。但是这样的交通系统是无边的,只要有人的地方就都有道路都有车辆,因此我们需要划一个界限研究一个交通,如果要用传统控制的方法去研究就会面临新的挑战,传统的交通理论就面临一个新的变化,原先我们是用流体力学的方式研究传统交通流量,但是现在需要换一种思路。
由于我们的车辆是离散的、是随机的,所有的信息都可以获取,于是我们需要从统计学的角度随机统计的效果去建立一套新的交通流理论,这是我们面临的重要挑战问题之一。
到底有那些具体的挑战?
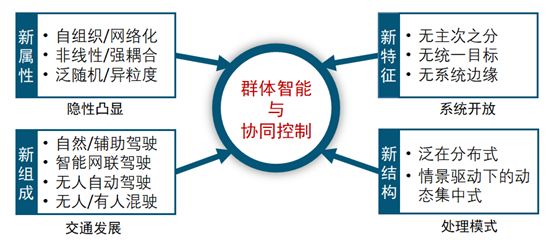
第一个挑战是交通系统属性发生了变化。原来的传统的交通系统我们是用流体学来检测交通流量,这个时候没有办法关心的每部汽车,当然并不是我们不想关心,而是之前没有手段关心。现在车路协同以后,所有车辆里面的原本在传统交通系统中不显现特性现在凸现出来了,如自组织、网络化、非线性、强耦合、泛随机及异粒度,这时我们在用传统交通流的方法研究已经不适应了。
第二个挑战是交通的组织成分发生的变化。随着车路协同的发展,我们就会有网联汽车的进步,在这个情况,一部分是完全靠人自己决定的,一部分可以通过网络获得信息的,增加的成分问题,现在自动驾驶引进来了,更可怕的是将来自动驾驶车和人驾驶车放在一块,而且是长期共存的情况下,交通成分发生变化以后,这个时候对我们整个挑战发生了大的影响,我们的模型已经不能像以前那样单纯了,更加复杂了,我们的组织成分发生了变化。
第三个挑战是交通系统没有边界了。以前我们可以切一个界面研究哪几辆车,现在行不通了,在研究过程中我们发现按照交通的结构,交通系统里面没有了主次之分,所有的车都是平等的,没有统一目标,所有民用车辆全是分散目标。三是系统没有边界,找不到边在那儿,只要有人存在的地方就有交通系统,是当做开放的复杂系统去研究。
第四个挑战是用什么样的结构去研究新的交通系统。总体层面上这里列出来泛在分布式,但是在情景驱动下的动态集中式,我们现在研究集中控制被动成分是固定的,大家知道求优化目标的时候,SI中的I是固定的,从1到N中的N是固定的,但是在交通里面不是这样,比如在路口通行过程中间,在情景化过程当中要研究在一定范围内有一百个汽车的时候,这个时候一百个汽车到下一个时刻五六辆就出去了,然后又进来了三四辆汽车,在求优化目标的时候就发生一个新的挑战,没有办法用传统的求优化问题的方式来解决它,这样的情况下这就是我们的挑战。
那怎么才能解决这样的挑战呢?在这个情况下必须采用群体智能协同控制的方式来解决开放的复杂的交通系统面临的交通管控问题,随着这样的发展,而且交通的协同管控的需求摆在面前我们必须研究相关的基础和关键技术问题。
群体智能与协同控制
下面从四个方面的分析群体智能和协同控制该怎样实现。
一、基于车路协同的群体智能协同控制系统——分析
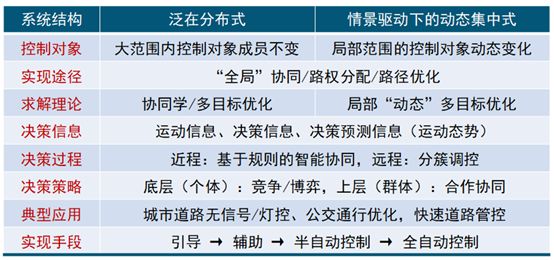
智能协同控制机制与主要内容
首先我们来分析一下系统的结构有哪些是与传统的不一致。首先,控制对象发生了变化,如果是泛在的分布式,那么在很大的范围内是不变的,但是系统结构太大了,如果大范围去研究它的话就会出现一个很大的问题,就是在求优化、求解的过程中是超高维的计算问题,而要解决超高维计算的问题是非常困难的。
其次,如果不考虑泛在分布问题,而考虑在情景驱动下集中式的时候,比如一百个对象,这一秒钟是这一百个,下一秒钟变成不是一百个,怎么在连续过程求最优过程,这是在算法上面的挑战。
还有问题就是在实现途径的问题,即便算法非常好,真正用到解决交通实际问题的时候,是要考虑实现途径的问题的。首先就是路权分配问题、路径优化问题以及系统局部的协同问题。
以及决策信息的协同学的问题,主要用协同学的方法做多功能优化,目标发生变化的问题,以及在决策过程中近程怎么解决,远程怎么解决,范围怎么确定等等。
我们还要考虑到实现手段,交通系统是一个逐渐发展的过程,包括车路协同,包括智能网联汽车,在变化过程当中所有的理论和方法的应用怎么落地,如果不能落地,技术就死在那里,所以我们要解决现在具体问题速度引导到半自动的控制问题以及到全自动控制问题,在整个发展过程中技术方案都必须发挥作用才能发展全面。
二、基于车路协同的群体智能控制系统实现——感知
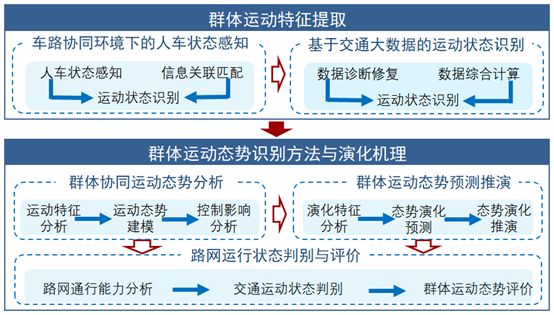
基于交通大数据的人车状态感知/运动态势演化/路网运能评价
感知方面也会发生非常大的变化,传统的感知都是通过一个或者少量传感器对断面进行分析。或者对网络状态分析的时候,我们不只是为了一个目标去做,现在在新的车路协同环境下,新的信息发生变化以后,我们可以做协同分析。所以感知从原来的单一的少量的信息融合要跨越到协同感知问题。即同样一个目标的感知,要用多辆汽车或者路侧设备共同决策感知是什么样的。这样也会大大增强我们对环境感知能力的提高。
原来单车的自动驾驶是靠车上的传感器来判断路上所有的物体,这个时候变了,被感知车前面有辆汽车,后面有辆汽车,旁边还有一个路侧设备,用三个检测它的设备获取更全面的信息。
再这样的情况下,在群体协同行为在感知中间发生很多的变化。这里还有个运动态势问题,传统的交通如果是个元函数,运动状态要做一个运动的变化,运动态势是什么?一阶的要求它的导数,再要看决策的预测问题,就是二阶导数,按数学的简单解释就是这样的。在现实交通里面通过信息的感知实现这样的结果是不容易,这也是另外一个创新点,我们希望能借着车路协同现在获得的交通信息层面上能不能对传统的感知升级形成一个协同的感知问题。
三、基于车路协同的群体智能控制系统实现——控制
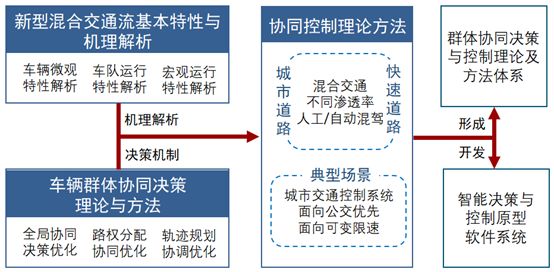
混合交通群体协同决策与优化控制理论方法
控制就是要解决实际问题,我们要从微观的车辆、中观的车队、宏观整个区域的新的交通流的研究,同时结合路权分配问题、路径优化问题、协同优化问题等解决一系列控制问题,在快速道路和城市道路上混合人工与自动驾驶混驾的情况下,形成新的群体协同决策与控制理论及方法体系。
四、基于车路协同的群体智能控制系统实现——计算
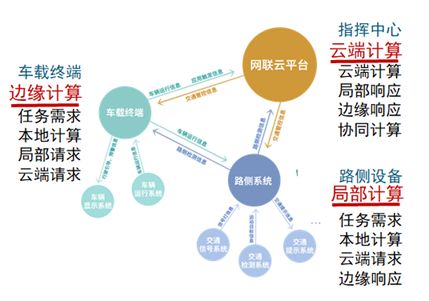
解决这个问题的关键计算结构就是要把边缘计算和局部计算加云端计算结合起来,在这样的复杂新型交通系统里面才能很好的解决协同和控制问题。边缘计算主要是车载;局部的是情景中的集中部分,比如说路侧的信号灯为核心的路测协调系统;云端的就是中心。三者结合形成有机的计算平台。分配好计算任务才能解决问题。
以上就是从四个方面的分析智能协同和协同控制怎么实现。
解决方案与应用实现
最后有个形象的解释,到底怎么能实现这个问题,现在不是说不能实现,已经有一定的基础,在国内的有多个企业已经有技术产品和技术的系统方案,包括像我星云互联、华为等也在做这样的解决方案,能够满足车辆之间的所有的信息交互,保证实施性和可靠性,现实中基本平台有了,缺的是决策的机制,缺的是控制协同的方法和理论。
现阶段,国家所有测试系统里面单车速度引导(交叉路口 + 高速路可变速度引导)、特殊车辆壁让(警车、救护车、消防车)、安全预警(盲区、危险车辆、驾驶行为)依托这三种特性,展开的各种测试场景。
再往此后,由于群控制的一些办法,我们会发现有新的一些变化,比如说信号灯控制、车流引导/控制 + 配时调整、快速路控制、稳态流引导/控制(快速路可变速度控制)、城市公交优化控制、公交与信号控制协同(新型城市公交优先控制)、不同渗透率下混合交通管控、自然驾驶与网联驾驶混驾、自然驾驶网联驾驶与智能驾驶混驾、人工驾驶与自动驾驶混驾等。



