多相机视觉系统的坐标系统标定与统一及其应用
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
整理:公众号@新机器视觉
本文仅做学术分享,如有侵权,请联系删除。
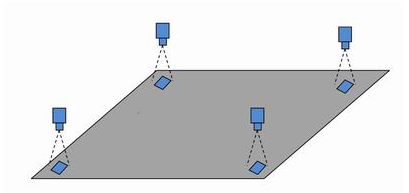
随着机器视觉应用的日益广泛,大幅面 多相机 视觉系统的需求越来越多,主要应用方向为大幅面高精度的定位与测量和场景拼接等。
多相机视觉系统的难点在于多相机坐标系的统一. 可以分为两类,一是相机视野间无重叠部分,二是相机视野间有重叠部分。
相机间无重叠部分的情况主要用于大幅面多相机高精度的定位和测量,相机间有重叠部分的情况主要用于场景的拼接等。
|
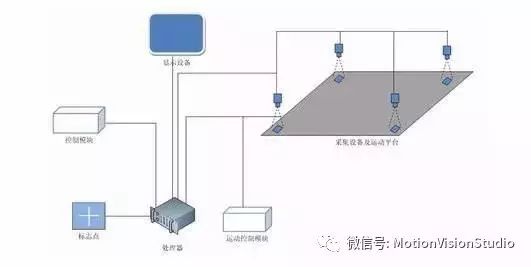
系统结构: |
|
|
|
|
|
|
|
|
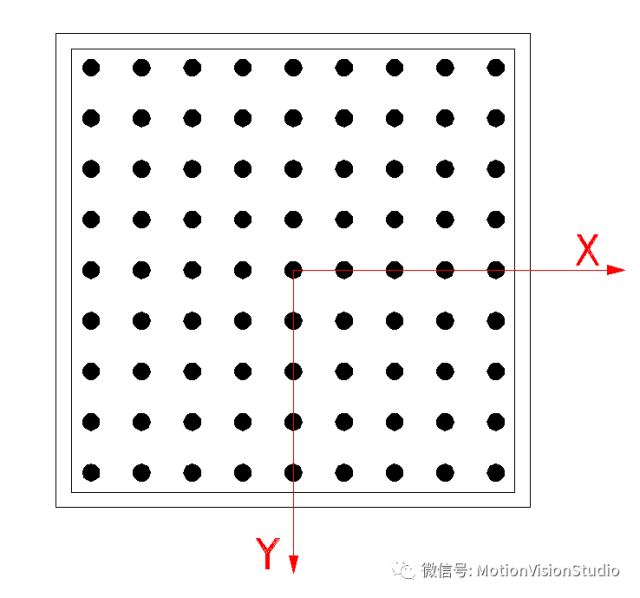
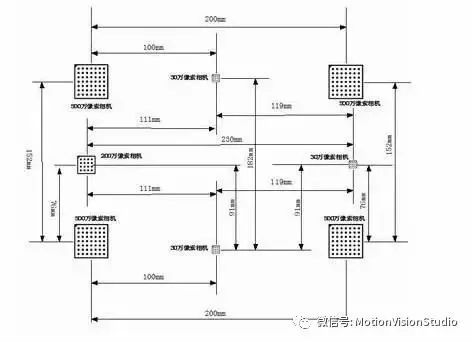
此种方法需要将多只相机的坐标统一到一个坐标系中,并且单一相机还要做自己的校准,保证精度。 根据检测要求,设置取多少个点作为参考,但是这影响测试的时间,需酌情考虑。
手机和平板电脑面板尺寸的检测。
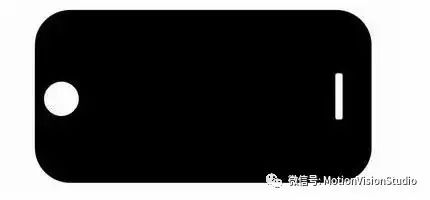
通过相机拍摄的图像对Mark点进行定位,从而计算出被测物相对于标准位置的偏差,包含角度偏差和位移偏差,最终确定机械装置需要旋转的角度和平移的距离。选用手机触摸屏和手机外壳的定位系统来介绍算法原理。
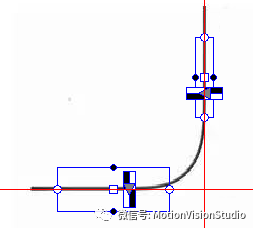
手机触摸屏和手机外壳的定位系统,使用多支相机代替一支相机的方法进行定位,使手机触摸屏和手机外壳精确组装。相机分为两组,每组两支相机,一组拍摄手机外壳(组1),一组拍摄触摸屏(组2),两组相机标定方法相同,下面只介绍拍摄手机外壳的两支相机的标定。相机固定,机械手吸住手机外壳移动,两支相机分别拍摄手机外壳的两个定位孔,使用模板匹配的方法对两个定位孔进行识别,如下图所示:

|
组1相机2: (2) 图像距离和实际距离之间转换比例关系的确定: 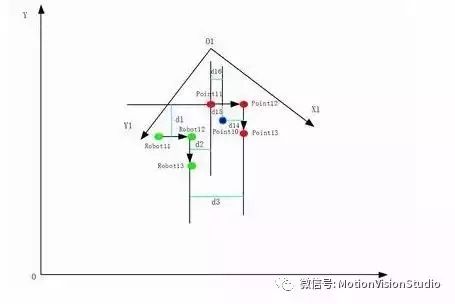
|
|
Point10X=X1[1] d16 d2,Point10Y=Y1[1] (d1-d15)。 同样可以得到Point20在机械手坐标系中的实际坐标: |
以后在每次进行检测时,得到的结果都和标准线进行比较,可以得到和标准线的夹角和相对于标准位置的位置偏差,根据得到的角度和位置偏差进行校正。在校正过程中需要先旋转后平移,做一个闭环反馈系统实时校正。
手机或平板电脑触摸屏和外壳的装配定位。
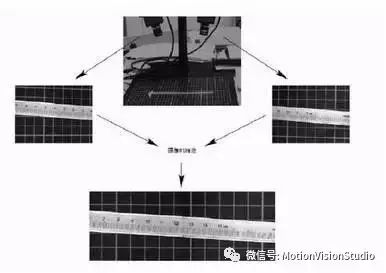
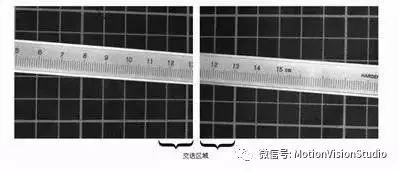
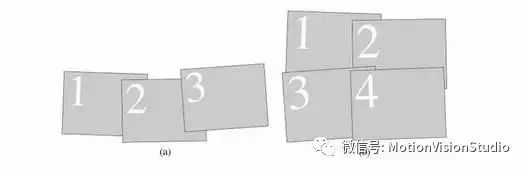
两个摄像机或多个摄像机必须安装在一个稳定的平台上,并且每幅图像覆盖整个场景的一部分。摄像机的方位可以随意,也就是说不需要它们看起来平行或垂直于物体表面。调整摄像机焦距、灯光以及交迭区域,使用一个大的可以覆盖整个视野的参照物。为了保证可以将多幅图像拼接为一副大图,它们之间必须存在一个小的交迭区域。交迭区域可以很小,因为这个交迭区域只是为了保证在拼接的结果图像中没有缝隙,下图为交叠区域示意图。
图像的标定可以分为两个步骤。
确定每个摄像机的内参。可以分别对每个摄像机进行标定求取摄像机的内参。
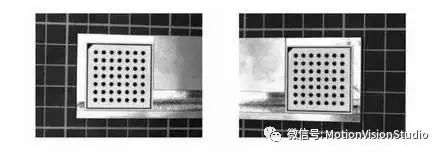
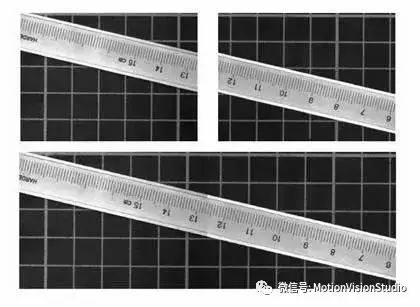
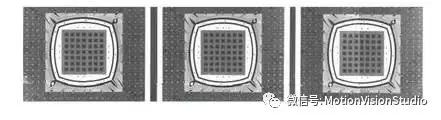
确定所有摄像机的外参。因为最后要将所有的图像转换到某一个世界坐标系中,所以需要使用一个大的标定物,这个标定物可以出现在所有的图像中,它可以由多个标定板组合而成,标定板的数量和使用摄像机的数量一致。下图为两个相机分别拍摄到的标定图像。
注意:为了确定摄像机的外参,每个摄像机只需要拍摄一副标定图像就已经足够。标定物在多个摄像机分别进行拍摄标定图像的过程中不可以移动。理想情况下,这些标定图像应该同时获取。
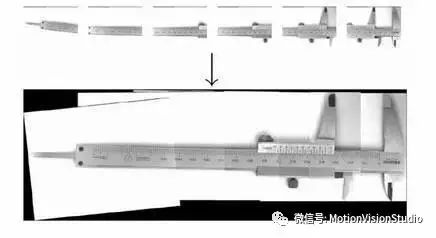
首先,每幅图像都必须进行校正,将这些图像转换到一个共有的坐标系中,它们之间就会正确匹配。在得到所有进行校正图像需要的映射图后,使用两个摄像机拍摄的每个图像对都可以进行校正并且高效的拼接。拼接的结果图由两幅校正后的图像组成,每个校正后的图像占图像的一个部分,下图为校正后的图像和拼接结果。
液晶面板表面质量的检测
此种方法和前三种方法相比精度较低,适用于不需要实现高精度拼接的应用场合。这种拼接方法的优点是不需要进行摄像机标定,并且每幅单独的图像可以自动进行排列。
拍摄单幅图像规则:
在拍摄每幅图像时需要遵循下面这些规则:
(1) 相邻的图像之间必须有交迭
(2) 图像之间的交迭区域必须有比较明显的特征,这样就可以保证比较精确的自动匹配过程。如果在某些交迭区域内的特征不明显那么可以通过定义合适的图像对来克服。如果整个物体的特征都不是特别明显,那么交迭区域就应该更大一些。
(3) 交迭的图像的缩放比例必须大约相等。一般情况下,缩放比例的不同不能超过 5-10%
(4) 这些图像的亮度应该相似,至少在交迭区域部分的亮度相似。否则,如果亮度区别非常明显的话,图像之间的接缝在结果图像中就非常明显,如下图所示。
需要定义一些交迭图像对,通过匹配确定这些图像对之间的转换关系。匹配的过程只会应用在这些交迭图像对上。
提取出的特征点的数量影响运行时间以及匹配的结果。特征点的数量越多,匹配的过程就越慢。但是太少的特征点将增大产生错误结果的可能性。
在交迭的区域中匹配特征点并且确定图像之间转换关系:
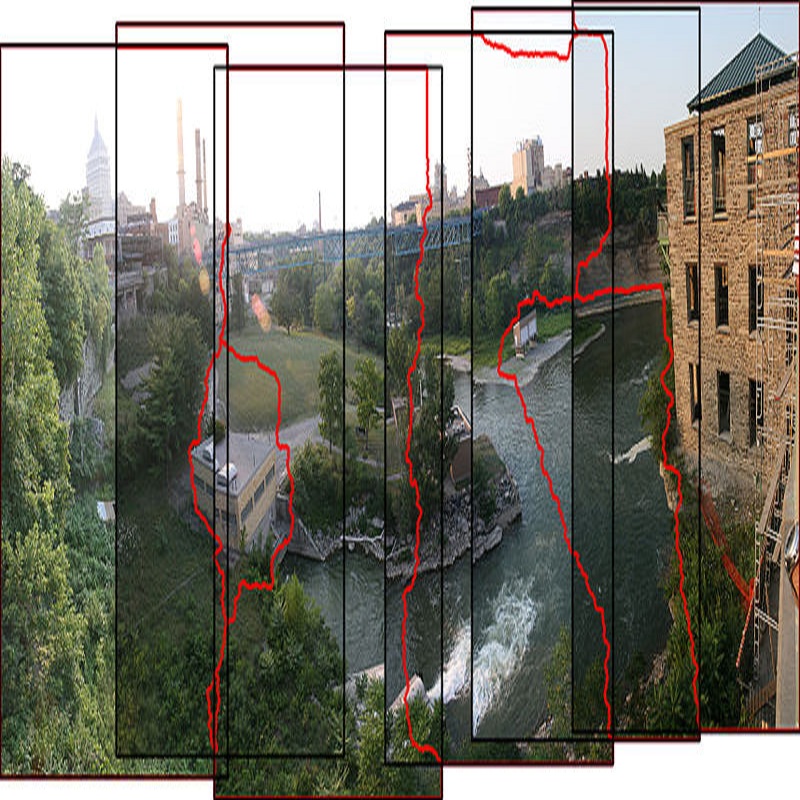
在进行图像拼接过程中最重要的任务就是图像对之间的匹配过程。匹配的图像对可以有任意的平移和旋转,唯一的要求就是图像应该有大约相同的缩放比例。如果图像之间平移和旋转的信息可用,它就可以用来限定寻找区域,这样就可以加速匹配过程并且使算法更加健壮。匹配特征点过程如下图所示。
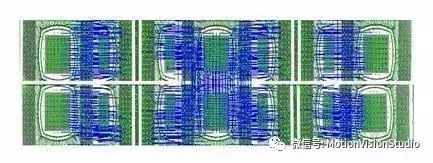
知道了图像对之间的转换关系,就可以调用函数进行图像拼接,下图为拼接好的图像。
需要注意球面拼接的情况,上述方法只适用于摄像机绕光心旋转或缩放。如果摄像机的移动包含平移或不是严格绕光心的旋转,使用这种方法得到的拼接结果将不准确也就不能够用在精确测量的场合。
(1) 街景的拼接。
(2) 电子地图的制作。
(3) 医学影像的拼接。
从0到1学习SLAM,戳↓
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
![]()
投稿、合作也欢迎联系:simiter@126.com
![]()
长按关注计算机视觉life
PS:公众号最近更改了推送规则,不再按时间顺序推送,而是根据智能推荐算法有选择性向用户推送,有可能以后你无法看到计算机视觉life的文章推送了。
解决方法是看完文章后,顺手点下文末右下角的“在看” ,系统会认为我们的文章合你口味,以后发文章就会第一时间推送到你面前的,比心~
![]()
从0到1学习SLAM,戳↓
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

投稿、合作也欢迎联系:simiter@126.com

长按关注计算机视觉life
PS:公众号最近更改了推送规则,不再按时间顺序推送,而是根据智能推荐算法有选择性向用户推送,有可能以后你无法看到计算机视觉life的文章推送了。
解决方法是看完文章后,顺手点下文末右下角的“在看” ,系统会认为我们的文章合你口味,以后发文章就会第一时间推送到你面前的,比心~
登录查看更多
相关内容

专知会员服务
27+阅读 · 2020年1月17日
Arxiv
6+阅读 · 2019年2月25日
Arxiv
8+阅读 · 2018年3月29日



相关VIP内容
专知会员服务
27+阅读 · 2020年1月17日
相关资讯
相关论文
Arxiv
6+阅读 · 2019年2月25日
Arxiv
8+阅读 · 2018年3月29日