DeepLabv3+:语义分割领域的新高峰
来源:paperweekly
作者:陈泰红,小米高级算法工程师,研究方向为人脸检测识别,手势识别与跟踪
论文: Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation
链接 :https://arxiv.org/abs/1802.02611
前言
临近春节,Google 团队也不休假,趁着中国人每年一度大迁徙,他们在 arXiv 放出了 DeepLabv3+,在语义分割领域取得新的 state-of-the-art 水平。本文将带大家回顾 DeepLabv1-v4 系列的发展历程,看看 Google 团队这些年都在做什么。
DeepLabv1
DeepLab 是结合了深度卷积神经网络(DCNNs)和概率图模型(DenseCRFs)的方法。
在实验中发现 DCNNs 做语义分割时精准度不够的问题,根本原因是 DCNNs 的高级特征的平移不变性,即高层次特征映射,根源于重复的池化和下采样。
针对信号下采样或池化降低分辨率,DeepLab 是采用的 atrous(带孔)算法扩展感受野,获取更多的上下文信息。
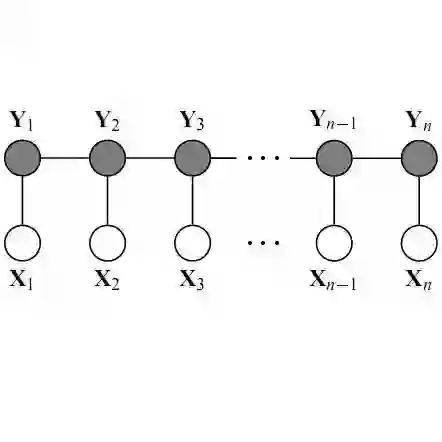
分类器获取以对象中心的决策是需要空间变换的不变性,这天然地限制了 DCNN 的定位精度,DeepLab 采用完全连接的条件随机场(CRF)提高模型捕获细节的能力。
除空洞卷积和 CRFs 之外,论文使用的 tricks 还有 Multi-Scale features。其实就是 U-Net 和 FPN 的思想,在输入图像和前四个最大池化层的输出上附加了两层的 MLP,第一层是 128 个 3×3 卷积,第二层是 128 个 1×1 卷积。最终输出的特征与主干网的最后一层特征图融合,特征图增加 5×128=640 个通道。
实验表示多尺度有助于提升预测结果,但是效果不如 CRF 明显。
论文模型基于 VGG16,在 Titan GPU 上运行速度达到了 8FPS,全连接 CRF 平均推断需要 0.5s ,在 PASCAL VOC-2012 达到 71.6% IOU accuracy。
DeepLabv2
DeepLabv2 是相对于 DeepLabv1 基础上的优化。DeepLabv1 在三个方向努力解决,但是问题依然存在:特征分辨率的降低、物体存在多尺度,DCNN 的平移不变性。
因 DCNN 连续池化和下采样造成分辨率降低,DeepLabv2 在最后几个最大池化层中去除下采样,取而代之的是使用空洞卷积,以更高的采样密度计算特征映射。
物体存在多尺度的问题,DeepLabv1 中是用多个 MLP 结合多尺度特征解决,虽然可以提供系统的性能,但是增加特征计算量和存储空间。
论文受到 Spatial Pyramid Pooling (SPP) 的启发,提出了一个类似的结构,在给定的输入上以不同采样率的空洞卷积并行采样,相当于以多个比例捕捉图像的上下文,称为 ASPP (atrous spatial pyramid pooling) 模块。
DCNN 的分类不变形影响空间精度。DeepLabv2 是采样全连接的 CRF 在增强模型捕捉细节的能力。
论文模型基于 ResNet,在 NVidia Titan X GPU 上运行速度达到了 8FPS,全连接 CRF 平均推断需要 0.5s ,在耗时方面和 DeepLabv1 无差异,但在 PASCAL VOC-2012 达到 79.7 mIOU。
DeepLabv3
好的论文不止说明怎么做,还告诉为什么。DeepLab 延续到 DeepLabv3 系列,依然是在空洞卷积做文章,但是探讨不同结构的方向。
DeepLabv3 论文比较了多种捕获多尺度信息的方式:
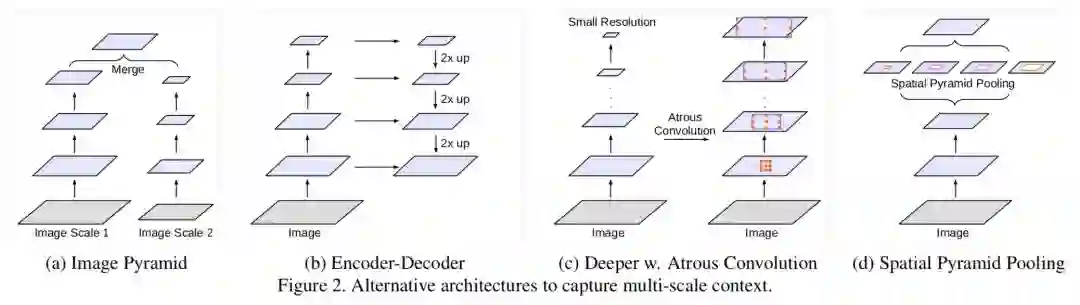
1. Image Pyramid:将输入图片放缩成不同比例,分别应用在 DCNN 上,将预测结果融合得到最终输出。
2. Encoder-Decoder:利用 Encoder 阶段的多尺度特征,运用到 Decoder 阶段上恢复空间分辨率,代表工作有 FCN、SegNet、PSPNet 等工。
3. Deeper w. Atrous Convolution:在原始模型的顶端增加额外的模块,例如 DenseCRF,捕捉像素间长距离信息。
4. Spatial Pyramid Pooling:空间金字塔池化具有不同采样率和多种视野的卷积核,能够以多尺度捕捉对象。
DeepLabv1-v2 都是使用带孔卷积提取密集特征来进行语义分割。但是为了解决分割对象的多尺度问题,DeepLabv3 设计采用多比例的带孔卷积级联或并行来捕获多尺度背景。
此外,DeepLabv3 将修改之前提出的带孔空间金字塔池化模块,该模块用于探索多尺度卷积特征,将全局背景基于图像层次进行编码获得特征,取得 state-of-art 性能,在 PASCAL VOC-2012 达到 86.9 mIOU。
DeepLabv3+
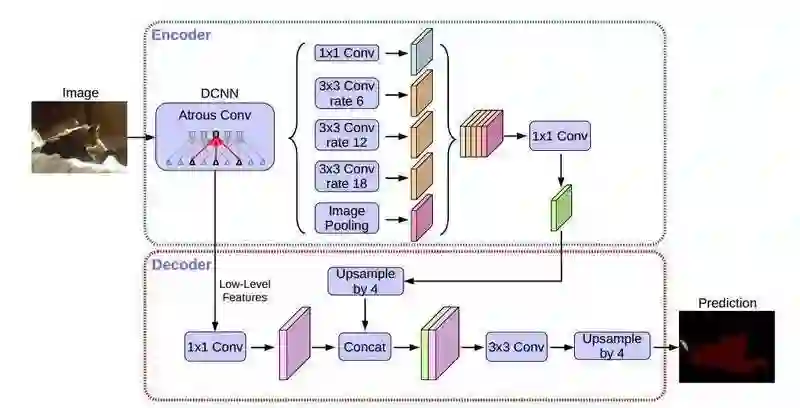
DeepLabv3+ 架构
DeepLabv3+ 继续在模型的架构上作文章,为了融合多尺度信息,引入语义分割常用的 encoder-decoder。在 encoder-decoder 架构中,引入可任意控制编码器提取特征的分辨率,通过空洞卷积平衡精度和耗时。
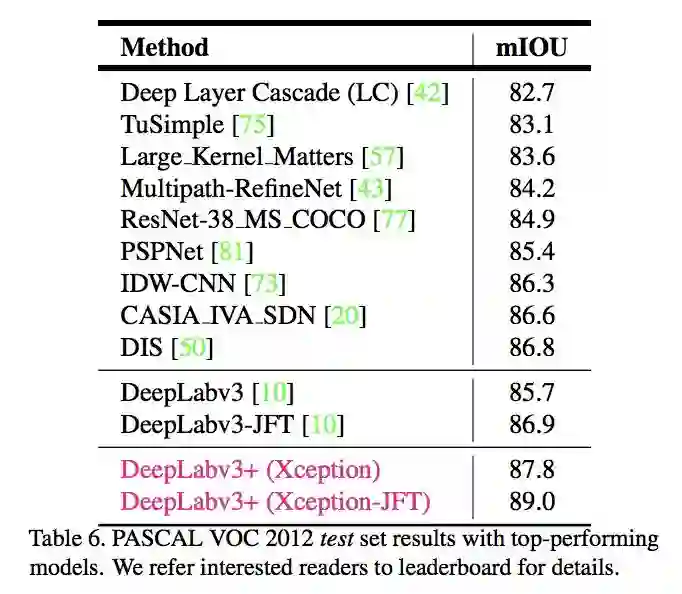
在语义分割任务中采用 Xception 模型,在 ASPP 和解码模块使用 depthwise separable convolution,提高编码器-解码器网络的运行速率和健壮性,在 PASCAL VOC 2012 数据集上取得新的 state-of-art 表现,89.0 mIOU。
Xception 改进
Entry flow 保持不变,但是添加了更多的 Middle flow。所有的 max pooling 被 depthwise separable convolutions 替代。在每个 3x3 depthwise convolution 之外,增加了 batch normalization 和 ReLU。
实验
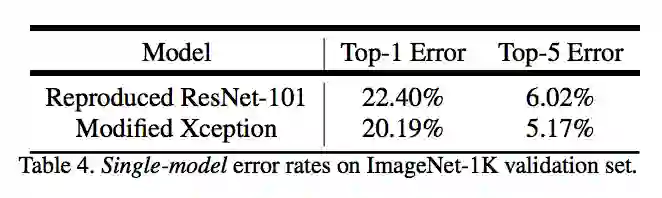
论文提出的模型在主干网络 ResNet-101 和 Xception均进行验证。两种方式均在 ImageNet 预训练。其中 Xception 预训练过程中,使用 50 个 GPU,每个 GPU batch size=32,分辨率 299x299。Xception 相比 ResNet-101,在 Top-1 和 Top-5 分别提高 0.75% 和 0.29%。
在实验过程中,分别考虑 train OS: The output stride used during training、eval OS: The output stride used during evaluation、Decoder: Employing the proposed decoder structure、MS: Multi-scale inputs during evaluation、 Flip: Adding left-right flipped inputs 等各种情况。
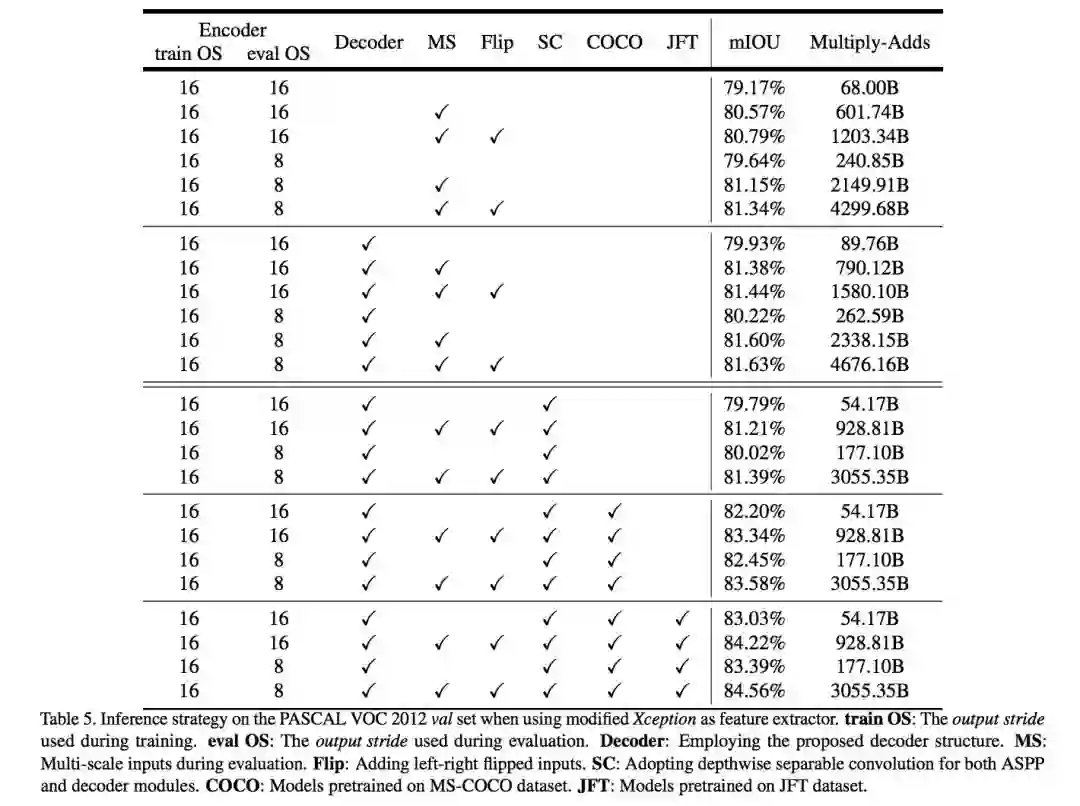
另外使用 depthwise separable convolution,使用 Pretraining on COCO 和 Pretraining on JFT,在这些 tricks 辅助下,PASCAL VOC 2012 test set 达到惊人的 89.0%,取得新的 state-of-the-art 水平。
结论
从 DeepLabv1-v4 系列看,空洞卷积必不可少。从 DeepLabv3 开始去掉 CRFs。
Github 目前还未有公布的 DeepLabv3,但是有网友的复现版本。DeepLabv3+ 更是没有源代码,复现起来估计有些难度。
DeepLabv3 复现:
https://github.com/NanqingD/DeepLabV3-Tensorflow
DeepLabv1-v4 没有用很多 tricks,都是从网络架构中调整,主要是如何结合多尺度信息和空洞卷积。从FCN,ASPP,Encoder-Decoder with Atrous Conv,每一个想法看上去在别的都实现过,但是论文综合起来就是有效。
Deeplabv1,v2 耗时为 8fps,从 Deeplabv3 开始,论文已经不说运行时间的问题,是否模型越来越慢了。
MobileNetV2 已经实现 Deeplabv3,并努力在 MobileNetV2 中复现 DeepLabv3+ 版本。
参考文献
[1] Semantic image segmentation with deep convolutional nets and fully connected CRFs
[2] DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs
[3] Rethinking Atrous Convolution for Semantic Image Segmentation
[4] Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation
*推荐文章*
PS.极市平台正寻求与开发者视觉算法的合作,欢迎联系小助手(微信:Extreme-Vision)沟通合作~ 也欢迎大家投稿~