DeepLabv1 & DeepLabv2 - 空洞卷积(语义分割)
本文为 AI 研习社编译的技术博客,原标题 :
Review: DeepLabv1 & DeepLabv2 — Atrous Convolution (Semantic Segmentation)
作者 | Sik-Ho Tsang
翻译 | 斯蒂芬·二狗子
校对 | 酱番梨 审核 | 约翰逊·李加薪 整理 | 立鱼王
注:本文的相关链接请点击底部【阅读原文】
在本文中,回顾了DeepLabv1和DeepLabv2网络,因为他们都使用带孔卷积 Atrous Convolution和全连接的条件随机场(Conditional Random Field,CRF),除了DeepLabv2有一个额外的技术叫做空间金字塔池化Atous Spatial Pyramid Pooling(ASPP),这是DeepLabv2与DeepLabv1的主要区别。 (当然,还有其他差别,例如:DeepLabv2使用ResNet和VGGNet进行实验,但DeepLabv1仅使用VGGNet。)
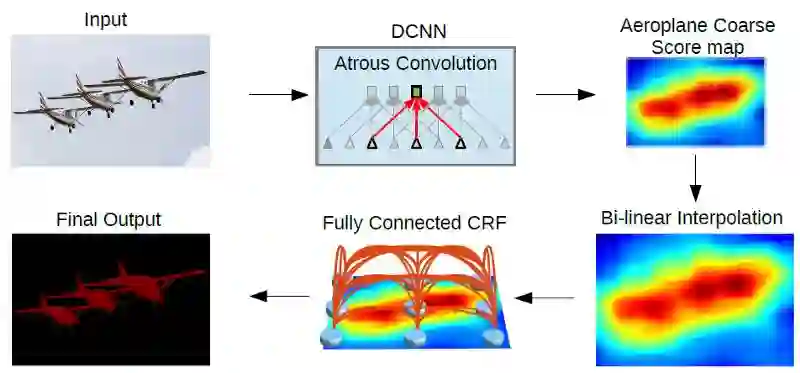
DeepLab 模型
上图是DeepLab模型架构。首先,输入图像通过网络中的atrous卷积和ASPP。然后,网络的输出图进行双线性插值bilinearly interpolated,并通过完全连接的CRF来微调结果并获得最终输出。
DeepLabv1和DeepLabv2已经在2015 ICLR和2018 TPAMI上发布,在我写这篇故事的时候分别引用了400和2000。
本文涉及的内容:
带孔卷积
空间金字塔池化
全连接的条件随机场
实验结果
1.Atrous卷积
“Atrous”这个词确实来自法语“àtrous”意思洞。因此Atrous conv.也被称为“空洞卷积”。一些论文也称之为"dilated convolution"。它通常用于小波变换,现在它被应用于卷积中以进行深度学习。
下面是atrous卷积的表达式:
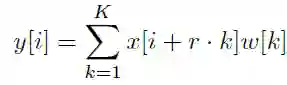
1维的带孔卷积(r > 1:atrous卷积,r = 1:标准卷积)
当r = 1时,它是我们通常使用的标准卷积。
当r > 1时,它是一个带孔的卷积,r是在卷积过程中对输入样本进行采样的步幅。
下图说明这一点
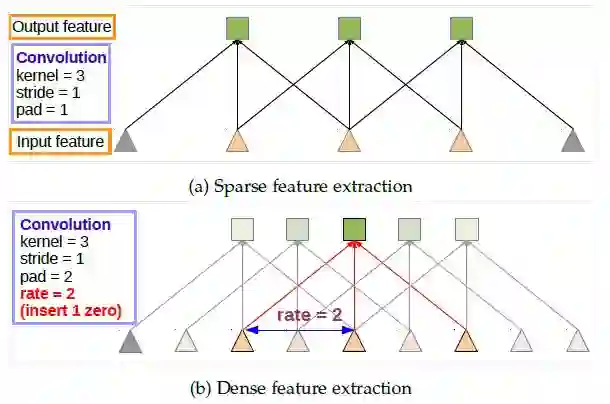
标准卷积(顶部)空洞卷积(底部)
atrous卷积的想法很简单。在上图的顶部是标准卷积。
在图的底部,它是一个空洞卷积。我们可以看到,当rate = 2时,输入信号被交替采样。首先,pad = 2 意味着我们在左侧和右侧填充2个零。然后,在 rate = 2的情况下,我们有每2个输入就对输入信号进行采样以进行卷积。因此,在输出端,我们将有5个输出,这使得输出的特征图增大。
如果我们还记得FCN一文中,一系列的卷积和池化会使输出特征图非常小,因此最后需要32倍的上采样,这是有些放大过度的上采样。
此外,atrous卷积使我们扩大卷积核filter的视野以包含更大的感受域信息。同时,它提供了一种有效的机制来控制感受野的大小,并找到精确定位(小视野)和通过前后信息修复(大视场)细节之间的最佳平衡。
在DeepLab中,使用VGG-16或ResNet-101,最后一个池化(pool5)或卷积conv5_1的步幅分别设置为1,以避免信号被过度抽取。并且使用rate=2的空洞卷积替换所有后续卷积层。这使得输出变大很多。我们只需要进行8次上采样即可对输出要求的尺寸。并且双线性插值对于8×上采样具有相当好的性能。
2.带孔空间金字塔池化(ASPP)
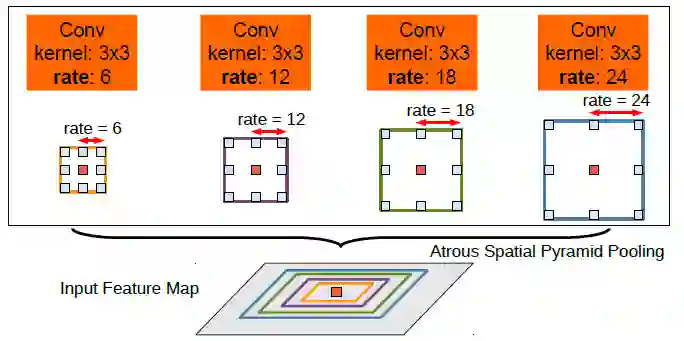
带孔的空间金字塔池化(ASPP)
ASPP实际上是空间金字塔池的一个版本,其中的概念已经在SPPNet中描述。在ASPP中,在输入特征映射中应用不同速率的并行空洞卷积,并融合在一起。
由于同一类的物体在图像中可能有不同的比例,ASPP有助于考虑不同的物体比例,这可以提高准确性。
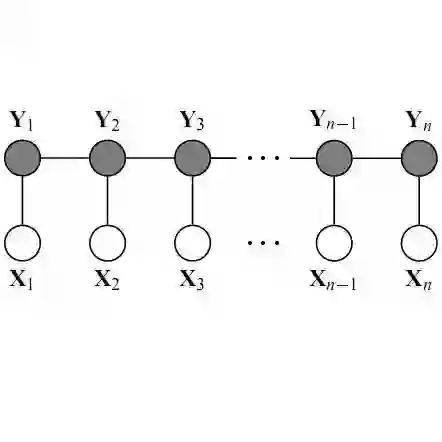
3.完全连接的条件随机场(CRF)
完全连接的CRF在双线性插值后应用于网络输出上
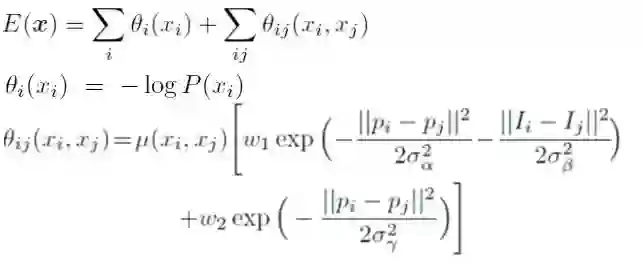
全连接的CRF
x是像素的标签分配。 P(xi)是像素i处的标签分配概率。因此,第一项θi是对数概率。
对于第二项,θij,它是一个滤波器。当xi != xj时,μ= 1。当xi = xj时,μ= 0。在括号中,它是两个内核的加权和。第一个核取决于像素值差和像素位置差,这是一种双边的filter。双边滤波器具有保留边缘的特性。第二个内核仅取决于像素位置差异,这是一个高斯滤波器。那些σ和w,通过交叉验证找到。迭代次数为10。
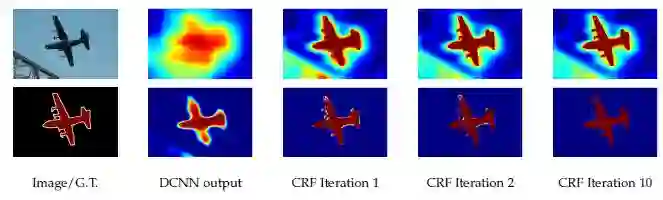
上:得分图(softmax函数前的输入),下图:置信图(softmax函数的输出)
通过10倍的CRF,飞机周围不同颜色的小区域变得平滑起来。
但是,CRF是一个后阶段的处理过程,它使DeepLabv1和DeepLabv2变为不是端到端的学习框架。并且它是不在DeepLabv3和DeepLabv3 +中使用。
4.结果
4.1 实验验证
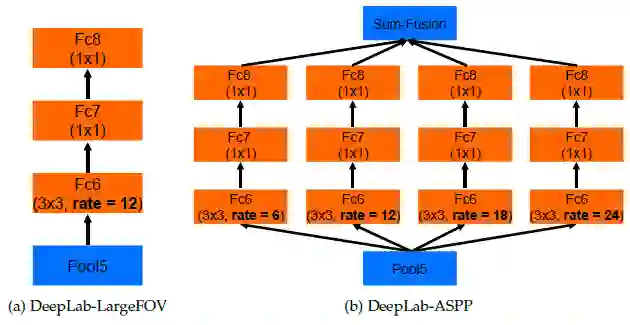
DeepLab-LargeFOV(左:即仅单个atrous conv),DeepLab-ASPP(右,即ASPP)

在PASCAL VOC 2012验证集中使用ResNet-101的每个模型组件的结果
简单使用ResNet-101: 68.72%
MSC: 多尺度输入
COCO: 由COCO数据集预训练的模型
Aug: 通过随机缩放(从0.5到1.5)输入图像进行数据增强
LargeFOV: 使用一次空洞卷积上采样的DeepLab模型
ASPP: 使用并行的空洞卷积的DeepLab模型
CRF: 全连接的条件随机场做最后处理
4.2 与最先进的方法对比
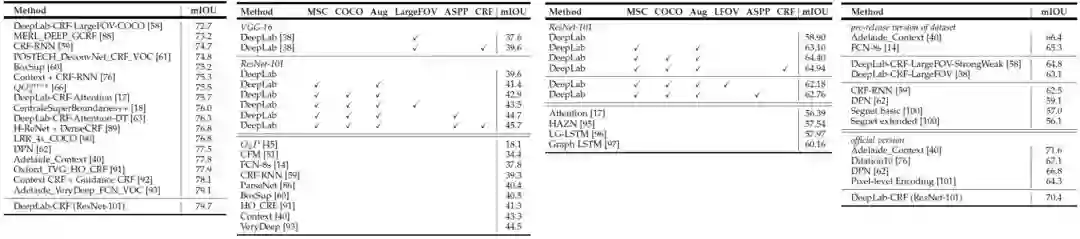
PASCAL VOC 2012测试集(最左侧)PASCAL-Context(左二)PASCAL-Person-Part(右二)Cityscape(最右侧)
如上所述测
4.3 定性的结果

结果: PASCAL-Context数据
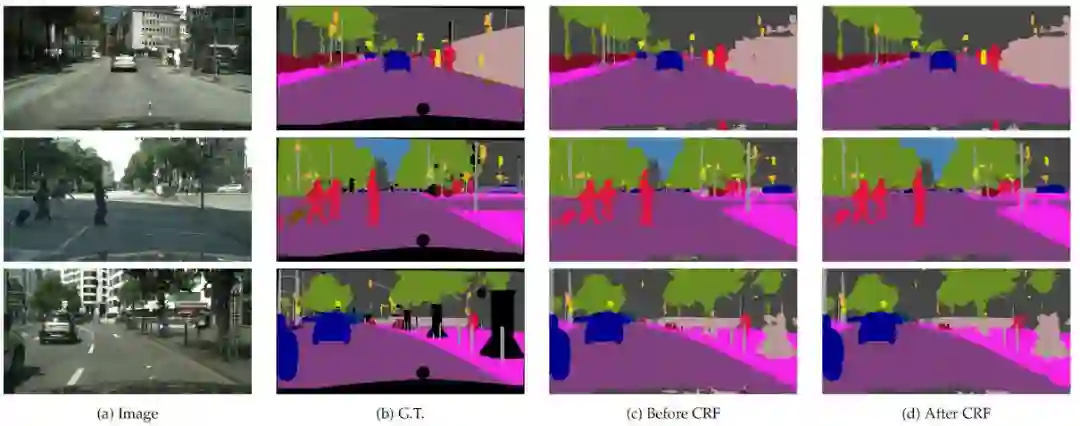
结果: Cityscape数据
但DeepLab也有一些失败的例子,其中自行车和椅子由多个细小的部分组成,如自行车和椅腿的部分:
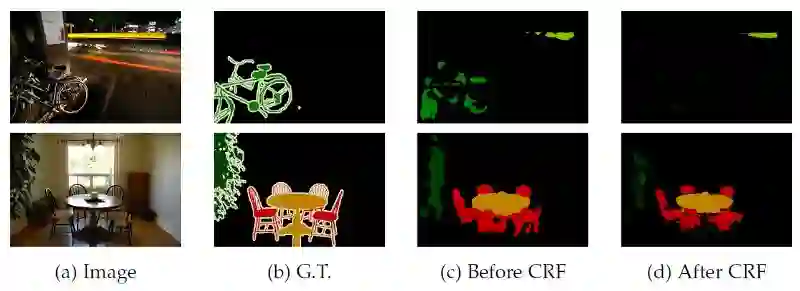
失败的例子
希望将来能够写篇关于DeepLabv3和DeepLabv3 +的博文。
参考文献
[2015 ICLR] [DeepLabv1]
Semantic Image Segmentation with Deep Convolutional Nets and Fully Connected CRFs
[2018 TPAMI] [DeepLabv2]
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs
我相关的文章
[SPPNet] [VGGNet] [ResNet] [FCN]
原文链接:
https://towardsdatascience.com/review-deeplabv1-deeplabv2-atrous-convolution-semantic-segmentation-b51c5fbde92d
想要继续查看该篇文章相关链接和参考文献?
点击底部【阅读原文】或长按下方地址访问:
https://ai.yanxishe.com/page/TextTranslation/1531
AI求职百题斩 · 每日一题

点击阅读原文,查看更多内容↙