发布全球最大 GPU,核弹厂英伟达为何要重新定义「虚拟世界」?

这一次,「黄教主」谈到了 Uber 事故、医疗问题、电影制作,以及关于这些更美好的未来。
「多快好省」可能很快就会成为英伟达的新 slogan,或者说「新教义」。
被网友亲切的称为「黄教主」、「核弹厂厂长」的英伟达 CEO 黄仁勋在今天的 2018 GTC 上讲的最多的一句话是:买得越多,省得越多。(Buy more GPUs , the more money you save.)
当然,这句话并不是他第一次说。十年的 GTC 历史,再到最近每年的 CES 主题演讲,黄教主几乎每半年就会拿出自己的「新核弹」,按照往常,每说到这句话时,黄教主应该从口袋掏出两款芯片,同时拿在手里做比较,而这一次确是一个意外,他拿不起来,因为他带来的是一款「全球最大的 GPU」。
与此同时,利用这些早已打破摩尔定律的高性能 GPU 设备,以及围绕 GPU 的一系列生态构建,从 PC 游戏绘图起家的英伟达正在逐渐把这种图形计算能力转化为构建 3D 甚至是 4D 的「虚拟世界」之中。
无论是让你分不清虚拟与现实的实时光线追踪技术(Ray Tracing),还是能还原现实的医疗图像超级计算机 Clara,甚至是把自动驾驶转移到虚拟世界的 DRIVE Constellation,英伟达今天发布的产品,更像是利用 GPU、 AI 和深度学习构建出一条「通道」,让虚拟世界与现实世界的「经验」能够互通。
接近两个半小时的演讲,被分为了四大部分:Amazing science、 Amazing graphics、Amazing products、Amazing AI。
即将消失的「影棚」
据说,每年来参加 GTC 的人,除了科技公司、云服务等公司的各大 CTO 之外,还有一帮来自好莱坞等电影公司的 CTO 们。
一上来,黄教主就先展示了一张照片,一张清晰的办公桌的照片。
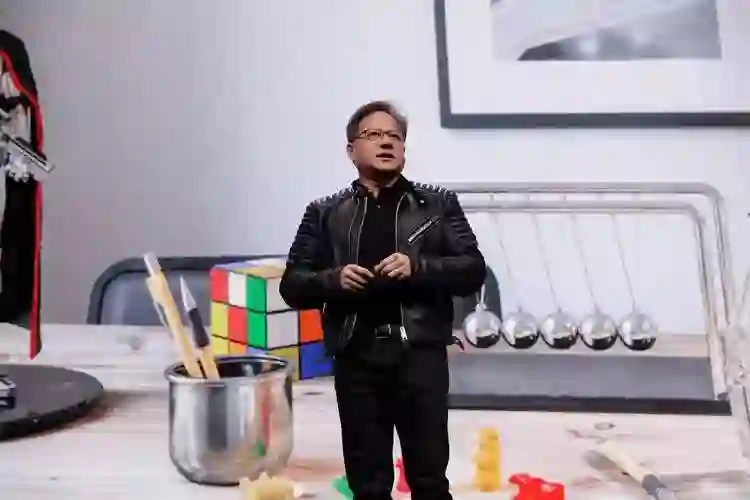
接着,他讲一节光学课。因为这张图片并不是真实拍摄的,而是通过光线追踪技术,利用 GPU 渲染出来的。
为了达到真实的效果,就要考虑到画面中非常小的细节,而其中最重要的就是光线与物体之间的多重影响,不同的物体吸收光线、折射光线的程度不同,发生的散射、漫射与透射等等都不相同,于是英伟达利用了 subsurface scattering 来达到这种光线的逼真效果。
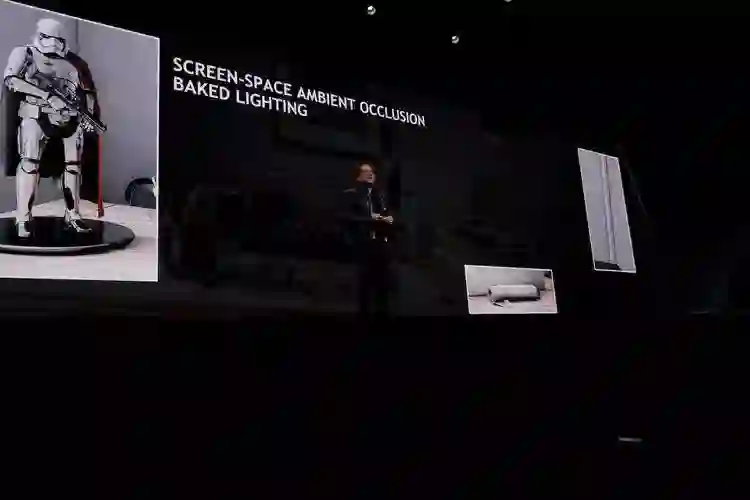
这在一般计算机图学中是非常难以达到的效果,但通过光线追踪技术,可以非常好的实现。更重要的是,其实实现一张这样的图片并不难,难的是实时渲染出这样真实动态场景的视频。
通过现场实时渲染 Star Wars 里的场景,来展示光线追踪的效果,可以说用肉眼你已经几乎分辨不出来计算机渲染和真实的电影画面了。而这也被称作世界上首次以实时方式呈现光线追踪的效果,更是拥有十倍于单独使用 CPU 的渲染速度。
利用 NVIDIA RTX 光线追踪技术生成这样的视频,只需要一台先前发布的全球首台个人深度学习超级计算机 DGX Station,搭配四块 Volta 绘图卡就能完成。所以目前主流的电影创作者都开始应用了,例如 Pixar 开始利用这样的架构来生产他们的电影。
而今天也是英伟达首次推出搭载 NVIDIA RTX 光线追踪技术的 NVIDIA Quadro GV100 GPU 硬件,向数百万的艺术家和设计师提供实时光线追踪技术。最后,黄教主也不忘再次安利「用了越多的 GPU,其实就是越省钱」。

复合式核弹——「全球最大的 GPU」
这款被黄仁勋称为「全球最大的 GPU」的新产品就是——超级电脑 DGX-2。

在 GTC 2017 上,英伟达推出了搭载 8 块 Tesla V100 芯片的超级电脑 DGX-1,而仅仅六个月过去,今天发布的这款超级电脑 DGX-2 则搭载了 16 块新版 Tesla V100 的芯片,比 DGX-1 还要快十倍。
当然更重要的是,除了芯片数量的翻倍和版本的更新,为了让这些 GPU 在一起更好的协作,英伟达还首次更新了一项新的技术 NVSwitch,简单来说就是能让 DGX-2 中的 16 颗 V100 GPU「快速交流」,任何一对都可以通信,让每颗 GPU 拥有 50Gb/s 的带宽,同时最多支持 18 颗 GPU 相互连接。
在黄仁勋的眼里,DGX-2 是一个足够性感的产品。这是首款能够提供每秒两千万亿次浮点运算能力的单点服务器。DGX-2 具有 300 台服务器的深度学习处理能力,占用 15 个数据中心机架空间,而体积则缩小 60 倍,能效提升 18 倍。
「我们正在以大幅超越摩尔定律的步伐加快提升平台的性能,以实现突破,进而为医疗保健、交通运输、科学探索和其他众多领域带来革命性改变。」黄仁勋说。

有趣的是,教主还在现场玩了一把手机厂商惯用的「心理战」,先是公布了一个 150 万美元的售价,然后给出惊爆价 39.9 万美元,台下的人可能已经准备打电话订购了。
而作为一个生态构建者,英伟达也扩大了面向超大规模数据中心的深度学习推理能力。发布了 TensorRT 4 软件,以针对广泛的应用加速深度学习推理。相比 CPU,针对计算机视觉、神经网络机器翻译、自动语音识别、语音合成与推荐系统等常见应用,该软件最高可将深度学习推理的速度加快 190 倍。还宣布了面向 Kubernetes 的 GPU 加速,以促进企业在多云 GPU 集群上的推理部署。

不取代医生,而是医疗助手
「虚拟」如何帮助「现实」?医疗行业正在成为一个典型。而英伟达要做的不是让 AI 取代医生,而是让 GPU 展现更好的图像来帮助医生决策。
老黄推出了第一款专用于医疗图像处理的超级电脑 Clara,它能够支持 CUDA、CUDNN、TensorRT、OGL 以及刚刚提到的 RTX 技术。
在医疗图像方面,侦测疾病,视觉化的身体扫描技术,包括超音波、断层扫描等成为了疾病重要的判断依据。现场英伟达 Clara 通过对一个二维的超声波探测实时结果进行处理,利用 3D 技术重建扫描结果,直接精准还原患者体内脏器的 3D 立体型态活动,为医生展现出更不容易误判的完整医疗图像。同时通过把这些服务器虚拟化,利用 AI 来后处理这些医学图像,也更方便未来的机器学习。
目前,英伟达正在和众多医疗厂商合作,除了 GE 通用电气、三星电子等大厂外,还有像图玛深维、推想科技等 AI 医疗创业公司。
把自动驾驶搬到「虚拟世界」
「安全是自动驾驶最重要的因素」,黄仁勋一直在强调,他对上周的 Uber 事故表示惋惜,也暂停了在公共道路上进行自动驾驶汽车的测试。「所以我们决定暂时先停一下,不会太久,停下来看看结果是什么。我们可能会学习到很重要的经验。」黄仁勋说。
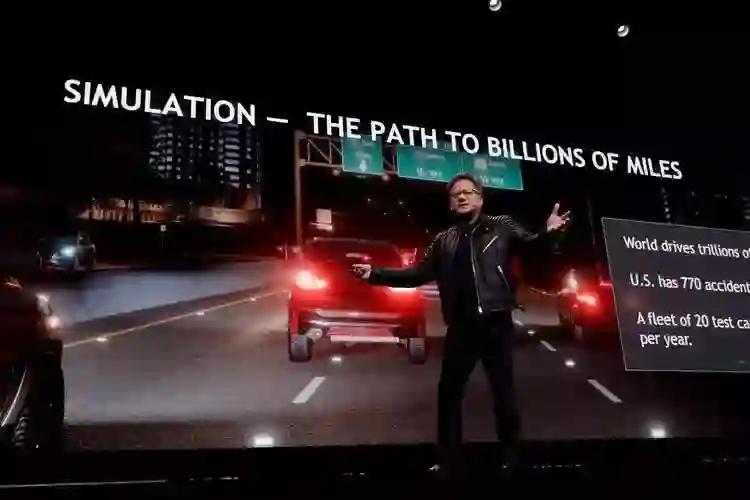
那么如何更好的保证测试的安全?英伟达给出的答案是:把他们全部放在「虚拟世界」中去测试。
今年一月 CES 上英伟达推出两款全新软件平台 DRIVE IX 和 DRIVE AR,这更多是为了提升汽车的辅助智能功能。而今天,英伟达推出了 NVIDIA DRIVE Constellation,一款基于两种不同服务器的计算平台,这才是真正解决了自动驾驶仿真测试的问题。
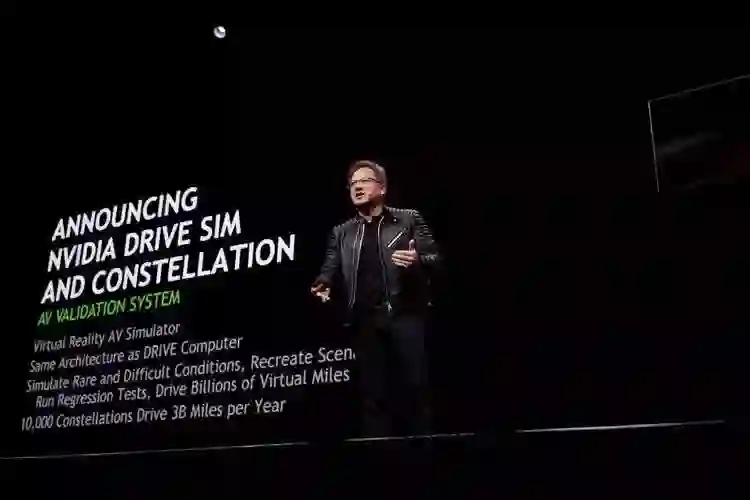
简单来说,这套平台可以让一台自动驾驶汽车在「虚拟世界」重建,并且实现道路测试。一台服务器运行 NVIDIA DRIVE Sim 软件,用以模拟自动驾驶汽车的传感器,如摄像头、激光 雷达和雷达。另一台服务器搭载 NVIDIA DRIVE Pegasus AI 汽车计算平台,可运行完整的自动驾驶汽车软件堆栈,并能够处理模拟数据,这些模拟数据如同来自路面行驶汽车上的传感器。

借助这样的虚拟现实技术,测试者可通过对数十亿英里的自定义场景和极端情况进行测试,从而提高算法的稳定性,而花费的时间和成本仅为实际道路测试的一小部分。
DRIVE Sim 软件可生成「照片级」逼真的数据流,以方便开发人员创建大量不同的测试环境。它能够模拟诸如暴雨和暴风雪等不同天气状况; 一天中不同时间内的光线变化,或是夜间受限的视野;以及所有不同类型的路面和地形。
英伟达希望通过图像渲染和虚拟现实技术,让算法在虚拟环境中的测试无限接近于真实场景。
简单过程是,DRIVE Sim 的仿真传感器数据流传送至 DRIVE Pegasus 进行处理,DRIVE Pegasus 的驾驶指令会再反馈给仿真器,以完成数字反馈循环。目前这个循环可以达到每秒 30 次的循环,相比于激光雷达的频率基本够用,可以验证在 Pegasus 上运行的算法和软件对仿真车辆进行的操作是否正确。
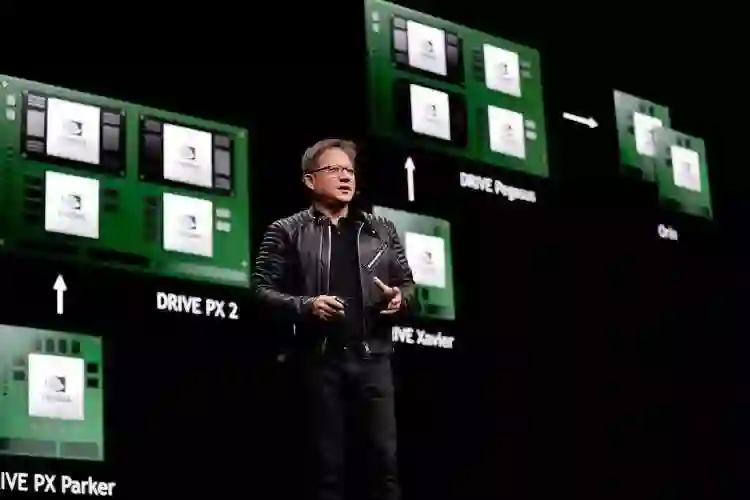
在此期间,老黄还透露了 NVIDIA DRIVE Pegasus AI 汽车计算平台的下一代产品代号——Orin。在车载计算平台的规划上,英伟达在采取一边加倍芯片数量,一边不断压缩为小尺寸单独 SOC 的模式,循环迭代。
据透露,Drive Constellation 将在今年第三季度推向市场。
而目前,已经有超过 370 个不同的公司在使用英伟达的计算平台,包括供应商、整车厂、物流车和自动驾驶创业公司等等。

而到这里英伟达关于汽车的解决方案还没完,Drive Constellation 解决了「路测问题」之后,当真正部署无人车之后,如何实现人类的远程接管?英伟达利用之前发布的 Holodeck 虚拟世界中实现了远程控制现实世界里的汽车。
整整两个半小时的演讲带来了太多的新产品,让我们看到了英伟达不仅仅在计算能力上的提升,更是在构建一整套「细致」的生态服务。
但其实黄仁勋还有内容并没有时间讲完。最后一点,这次英伟达还宣布同全球智能设备第一大主流芯片架构提供商 AEM 合作,将在数十亿物联网设备上实现深度学习。NVIDIA 深度学习加速器 IP 将集成到 Arm 的 Project Trillium 平台中,以便于构建深度学习 IoT 芯片。强强联手,六个月后,也许黄教主能在 IoT 领域再次带来「核弹」。
两个半小时不间断的演讲,黄仁勋却好像并不累。演讲结束后,还「突袭」了另一场群访,自愿去解答大家的疑问,甚至非常可爱地站在凳子上,以方便可以很好地回答大家的问题。

每六个月,「教主」都会穿着皮衣与你相见;如果你仔细观察,你会发现他的皮衣并不是同一款。
责任编辑:卧虫
本文由极客公园原创
转载联系 zhuanzai@geekpark.net