
随着材料学、化学、控制等学科的不断突破,人们对章鱼、蠕虫、海星等软体生物的观察及建模有了突破性进展,并衍生出一门新的机器人研究方向——软体机器人。本文通过回溯软体机器人的发展历程,介绍了近年来软体机器人在材料类型、驱动方式、应用领域等方面取得的进展以及面临的挑战,并结合中国国情展望了软体机器人未来发展的前景与方向。
深度|软体机器人前沿技术及应用热点
传统机器人大多由限制了弹性变形能力的刚性材料制成,其形状适应特定的外部约束与障碍,具有高度精确性的特点。对这些刚性机器人的运用倾向于专业化与精确化,它们很难表现出高度可变形能力与对不同情况的适应性。随着机器人运用领域继续扩大,医疗保健、复杂地形勘探等特殊领域对机器人提出了更加严苛的要求,能够适应非结构化环境的特殊机器人成为科学界研究的热点方向。研究者们通过模仿自然界中的软体动物,研制出了软体机器人。软体机器人较少甚至完全不使用传统刚性材料,而是采用流体、凝胶、形状记忆聚合物等可成型材料。这种材料表现出与软体生物一般的弹性和可变形性质,可以承受大应变,允许机器人在各种不同环境下进行大幅度地拉伸收缩。通过对机器人机体的主动变形,改变其原有的形态结构和尺寸,以适应多变的环境进行特定操作。此外,软体机器人大多采用流体驱动、物理驱动、内燃爆破驱动等驱动方式。软体机器人的发展经历了由部分软体到全软体、由有拖缆到无拖缆的转变。其在工业易碎物品抓取、狭窄空间探测及野外勘探、抗险救灾、医疗辅助等领域均有着广泛的使用价值,但在材料、加工、自主控制等方面,软体机器人技术仍然存在一定缺陷并面临着挑战。本文通过分析软体机器人的发展历程,聚焦其在材料运用、驱动方式、应用前景等方面的发展状况,展望软体机器人技术未来的发展方向。
传统的刚体机器人通过众多刚性连接的接头来实现多个自由度的运动,但有限的自由度不足以实现其在更为复杂的环境中自由运动。为此,科学家通过增加连接节点数,以此来实现更高自由度的运动。这种自由度数(主动关节数)大于完成某一作业任务所需最少自由度数的一类机器人称为超冗余度机器人(图1)。

图1 超冗余度机器人
之后产生了一类能够沿其长度不断弯曲、产生平滑曲线的机器人。这类机器人没有刚性链接或明显的旋转接头,对更为多变的工作环境有着较强的适应能力,被称之为连续型机器人。美国克莱姆森大学的Walker和Gravagne等对连续型机器人深入研究,研制了仿象鼻子机器人,该机器人结构上分为4段,采用四线驱动的方式,通过各关节的协调控制,可在三维空间内灵活弯曲并具有一定的负载能力,能实现对一定质量与形状的柱体和球状物体的握取。
自然界中的生物利用自身软体结构能够有效地适应复杂多变的环境。这些软质部分同它们的身体结构与中枢神经系统形成一个完全集成的控制系统。这些柔性组织具有众多的优势,帮助动物克服和适应不断变化的外界条件环境:一方面,柔性组织可以形成柔软表面,在较大的面积上分布应力、增加接触时间,从而最大程度地降低冲击力;另一方面,具有高度灵活和可变形的结构为动物提供额外的功能优势,如使身体进入狭小的空间中寻求庇护或进行狩猎。研究人员通过模仿自然界中软体生物的生物力学特性,设计制造了由新型软体材料构成的软体机器人。软体机器人具备了无限自由度和连续变形能力,对于传统机器人无法到达或正常工作的特殊环境有着极强的适应能力,柔软的构型材料使机器人具备更强的人机交互能力。随着人们在医疗、野外勘探等领域对机器人的特殊应用需求日益增长,软体机器人技术逐渐成为学界研究的热点之一。
科学家从20世纪便开始了对软体机器人的探索。1989年,日本冈山大学软体机器人实验室完成了早期的软体机器人——小型柔性机械手(图2(a))该机械手采用白色硅胶材料浇筑而成,使用压缩气体驱动方式,具有7个自由度能够完成基本抓持动作。此后,冈山大学研究室又先后完成了仿蠕虫自主推进式内窥镜(图2(b))及气动蝠鲼(图2(c))两种采用硅胶材料和气动驱动模式的软体机器人。2007年,美国国防部高级研究计划局综合应用了材料化学以及机器人学,研制出能够通过改变自身形态来通过狭小空间的化学机器人Chembots(图2(d)),开辟了软体机器人在勘探领域的运用。

图2 软体机器人
近年来,得益于材料科学、控制、机电等学科的发展进步,软体机器人技术飞速发展。为提升机器人在野外勘探中的灵活性和工作能力,无拖缆软体机器人成为新的研究热点并取得重大进展:2014年,哈佛大学自主研制了一款仿海星软体机器人(图3)。此机器人由高弹性硅胶材料构成,并使用电动空气压缩机提供动力,可以自主行进长达2 h,能够承高强度冲击、碾压等作用,甚至具备在严寒气候、大风、水坑、火焰炙烤等恶劣条件下工作的能力。意大利BioRobotics研究所于2015年设计出一款防生章鱼则在成型材料及驱动方式上有所突破:该机器人利用硅胶包裹网状的SMA结构进行耦合变形,以此获得了触手抓取的动力,机器人触手的爬行、游动则由曲柄摇杆机构带动。

图3 仿海星软体机器人
2016年,美国哈佛大学仿生机器人实验室自主研发的软体机器人Octobot(图2(e))发表于《Nature》,引发学术界广泛关注。Octobot是世界上首个全软体的机器人,其基体由3D打印技术制造而成,由化学反应提供所需动力,采用流体驱动的行进方式。在此之前,电池、电路板等刚性电子器件都在制约着机器人朝着全软体、无限自由度的方向发展,造成机器人在实践运用领域的局限性。而Octobot所需的燃料储存、电源及驱动模块均采用3D打印技术由软体材料打印完成。Octobot可以完成爬、游泳等基本活动并与外界环境进行互动,是一款自主性极高的软体机器人。更重要的是,全软体机器人的成功为软体机器人发展带来了跨时代的突破。
国内软体机器人近几年发展势态迅猛。2016年,中国科技大学计算机学院陈小平团队的气动蜂巢网络软体执行器(图2(f))在国际软体机器人研究领域引起极大反响。气动蜂巢网络是一种天然的刚柔合一型结构,具备大幅变性、高灵活度、高负重比和低成本4大特性,为消除刚性机器人的本质局限性开辟了一条具有巨大潜力的新途径。2017年,北京航空航天大学王田苗、文力团队与德国自动化技术商Festo合作完成了OctopusGripper(图4)的研制,这是中国软体机器人领域发展的又一次突破。OctopusGripper是一款防生章鱼软体触手,由气动的软硅胶结构构成,其具备的柔性抓取特性可以实现对多种不同形态、大小的物体稳定、无损地抓持。这种对不同形态大小物体抓取的普适性,在工业制造、医疗康复等领域有着广阔的运用空间。此外,上海交通大学谷国迎课题组研发的三爪纤维增强型气动软体抓手具有良好的气密性和抓取能力,能够实现对不同形状和尺寸物品的精确抓持;浙江大学李铁风、黄志龙课题组开发出的软体仿生机器鱼在水中的速度刷新了世界已出现的同类型软体机器鱼的极限。在我国,越来越多的大学开始了对软体机器人领域更为深入的研究。

图4 防生章鱼软体触手
随着人们对自然更加深入了解、对软体动物及其特有结构的认识更加清晰,可以预见,软体机器人领域必将迎来新一轮快速发展。
为了达到更好的运动灵活性,软体机器人的基体大多采用硅胶等柔软的高弹性材料。随着材料科学的进步,一批新型合成材料进入了软体机器人领域,如multigait 软体机器人使用弹性聚合物为材质实现了更大的灵活性。此外,由于传统电机不适合直接用于软体机器人的制动,形状记忆合金(shape memory alloys,SMA)也被广泛选择为柔性致动器。以下详细介绍了硅胶、SMA、离子聚合物-金属复合材料(ion-exchange polymer metal composite,IPMC)软体、水凝胶等常见软体材料及特性(表1)。
表1 常见软体材料性能比较
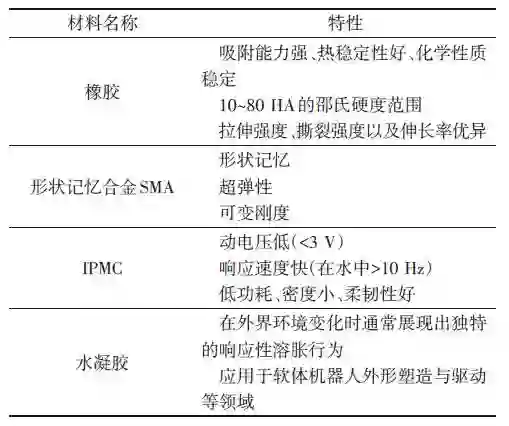
橡胶。橡胶是软体机器人发展历程中使用最早且运用最广的材料。橡胶的化学成分和物质构造,令其具有了优于其他同类型材料的特点:吸附能力强、热稳定性好、化学性质稳定等。橡胶10~80 HA邵氏硬度的宽广范围给予研究者充分的自由选择所需硬度,其优异的拉伸强度、撕裂强度以及伸长率为软体机器人的运用提供了条件。
形状记忆合金。形状记忆合金SMA是一种新型的功能性材料,加热后能够恢复原始形状,消除在低温状态下所发生的变形,具有形状记忆、超弹性和可变刚度等特性。由于具有这些显著特性,形状记忆合金已经成为结构振动控制研究中一种优越的传感和驱动材料,并大量运用于软体机器人的开发研究中,在软体机器人成型及驱动中发挥着重要作用。
IPMC。IPMC是一种电致变形的智能材料(离子型),具有驱动电压低(<3 V)、响应速度快(在水中>10 Hz)、低功耗、密度小、柔韧性好等优点。而采用IPMC材料制作水下软体机器人的推进器具有扰动小、无污染、无噪音、无需润滑等特点。这些特点都是许多传统刚性机械装置所不具备的。
响应水凝胶。凝胶拥有独特的基于化学键或物理作用交联形成的三维网状结构。响应水凝胶在外界环境变化时通常展现出独特的响应性溶胀行为,如一些水凝胶能因外界pH值、温度、光电信号、特殊化学分子等微小变化,而产生相应结构的变化。由于智能水凝胶有着能够随外界环境变化而产生形变的特性,所以其常用作智能驱动材料应用于软体机器人外形塑造与驱动等领域。
对研究者而言,为使软体机器人发挥作用并达到预期效果,选择合适的驱动方式便成为一项重要课题。软体机器人因其材质与结构的特殊性,对驱动方式的选择也有着更高的要求,如追求更大的自由度、灵活性、伸展性等。软体机器人的驱动方式大致可分成物理驱动、流体驱动和电活性聚合材料(electro-active polymer,EAP)驱动等。
物理驱动。通过内置形状记忆合金驱动器使软体机器人运动是当前较为流行的物理驱动方法,如意大利仿生机器人研究所研制的仿生章鱼(图5)。机器人全身由硅胶薄膜包覆网状形状记忆合金浇筑而成,通过网状形状记忆合金耦合变形实现触手的抓取,曲柄摇杆机构带动触手做出相应的爬行、游动等动作。此机器人的灵感来自自然界中章鱼的全柔性触手,样机受控变形效果近似生物原型,具有运动可仿真预测、环境自适应游动等优点。但仿生章鱼机器人仅触手开发较成熟,整机完成度低,驱动控制仍需拖缆辅助,存在着较大的提升空间。

图5 仿生章鱼
流体驱动。流体驱动方式利用气、液等流体,通过其变形结构使软体机器人内部腔体收缩、膨胀,以达到受控变形和运动的目标。气动人工肌肉(PAM)是一种早期的流体致动器,是由纤维套筒包裹可变形弹性管体构成的一种柔软的线性执行器。软体机器人使用PAM驱动的典型案例是哈佛软体机器人实验室研制的人工心脏(图6)。人工心脏外体为硅胶浇筑,内部螺旋状埋设人工肌肉。人工心脏通过气动人工肌肉(PAM)控制自身运动,选择性激活或关闭人工肌肉单元,进而模拟心脏肌肉收缩规律,并使用软件进行数值仿真。

图6 人工心脏
逐渐地,软体机器人开始使用弹性更为强大的流体致动器FEA(fluidic elastomer actuator)。FEA是一种新型的具备高变形性和适应性的柔性致动器,它具有合成材料构成的弹性体层和具备较大变形能力的加压流体扩大嵌入式通道,这类独特的结构通常被称为气网(PN)。FEA中使用的压力可以是气动或液压。由于自然环境中的空气具备易获取、质量轻、无污染等性质,因此气动系统通常优于液压系统。波动蛇形运动软体机器人由4个双向FEA制动器串联构成,机器人从头部到尾部沿其身体曲率曲折前进,身体带有刚性被动轮,被动轮之间产生侧向摩擦提供前进运动的分力。通过躯体不断扭曲,蛇形机器人最快可以达到19 mm/s的速度。iRobot 公司的干扰皮肤机器人则采用另一种气动驱动方式。内部气囊膨胀引起未受干扰的部分变形为机器人提供动力,由此带动机器人整体滚动前进。
除了控制气体引起软体躯体形变获得动力外,研究者们还通过压缩气体产生冲量推动机器人前进。美国斯坦福大学Denila Rus等最新研制的尾鳍推进机器鱼(图7)利用硅胶浇筑机器鱼的头部与尾部,用3D打印技术打造连接架部分。尾鳍推进机器鱼采用压缩空气或二氧化碳等气体产生推理前进,整体式人工肌肉(尾部2组空腔)进行方向控制,无需拖缆、遥控,自备动力源自主游动,可快速机动躲避障碍物。然而,压缩空气驱动使得废气不断冒出,不利于机器鱼水底作业隐蔽。

图7 尾鳍推进机器鱼
内燃爆炸驱动是气动驱动中的特例。哈佛大学Tolley等研制出自主跳跃软体机器人(图8)。该机器人外部躯体结构由硅胶树脂组成,依靠爆炸产生高压燃气进行推进。简单来说,就是一种“充气”再“放气”进而产生动力的跳跃方式。机器人底部设计了一个致动装置,装置内部加入了氧气和丁烷,通过火花点燃气体使气体爆炸后膨胀,而利用躯体膨胀的程度不同则可以控制机器人弹跳的方向。“放气”后的机器人弹跳高度可以达到0.6 m,所有步骤的实行不需外界控制系统的辅助。机器人运用3D打印技术打印刚性材料与软体材料混合的骨架,并采用刚性部件拼装,所有刚性部件如PCB、气瓶、气阀、电池等内置处理,可以很好保护机器本身适应剧烈形变而不致损坏。
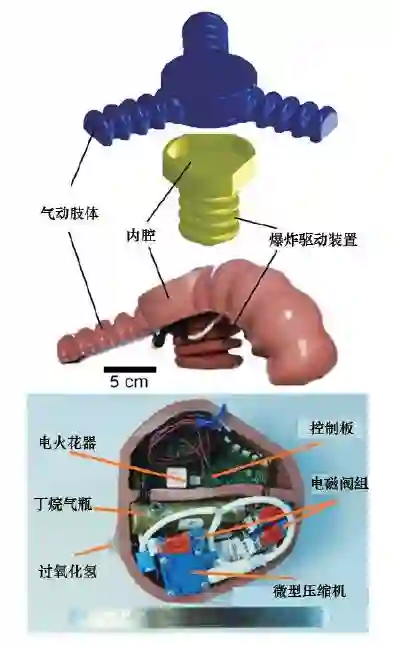
图8 自主跳跃软体机器人
EAP 驱动。电活性聚合材料EAP是一类在外加电场刺激下产生大幅度形变的新型柔性材料。与形状记忆合金等传统功能材料相比,EAP具有形变能力强、功耗低、响应迅速、柔韧性好等众多优点,因此常被用作软体机器人的驱动材料,并相应地衍生出一种新的驱动方式。根据换能机制的区别,EAP驱动可以分为离子型(IPMC)和电场型(DE)两种驱动模式。
离子型EAP驱动是在电化学的基础上,以化学能作为过渡实现电能到机械能的转化,而IPMC材料的运用是这种驱动方式的典型代表(图9)。当对IPMC材料的厚度方向施加电压时,IPMC 会向阳极弯曲,产生较大的变形。反之,当IPMC受到弯曲变形时,IPMC也会在厚度方向产生电压。通过这种特殊性质,IPMC 材料可以构成一个机电耦合系统。研究人员使用IPMC软体材料基于仿生学制造软体机器人,如蛇形游泳机器人或多自由度微型机械手。通过切割IPMC致动器表面电极,可单独控制每个躯体身段,以便实现蛇形或多自由度弯曲运动。
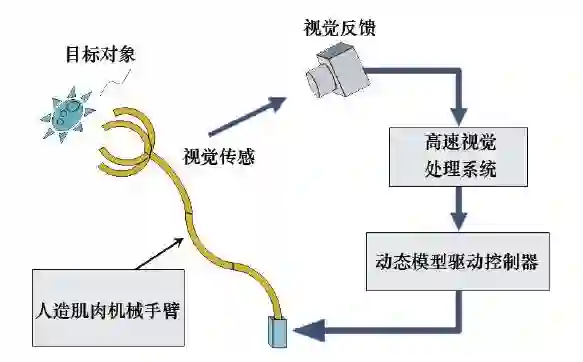
图9 EAP 驱动人工肌肉原理
电场型EAP驱动是由电场驱动产生电效应力,直接将电能转化为机械能,进而在宏观上表现出电致动特性。这种驱动方式可产生较大输出力,但激励电场电压较高。介电高弹体材料(dielectric elastomers,DE)常运用为此驱动方式的驱动器材料。Kofod等基于介电高弹体材料制作了软体三角状抓手,可抓起轻质的柱状物体。Jung等以蠕虫为仿生原型,设计出以DE材料为单元的驱动器,以6个基本单元为一组,形成一个二级的柱形单元,并将一组组合成后的二级单元连接成尺寸大小不同的蠕虫机器人,实现了1 mm/s的爬行速度。
软体机器人在生产生活中具有极其广泛的应用。根据其使用场景可分为以下3种主要运用领域。
人机交互康复机器人。相比于传统刚性机器人,软体机器人柔软的机体使其可以更高效、安全地与人类和自然界进行交互。如同人体灵活的躯干与肌肉,软体机器人柔软的机体、弯曲的形态和不规则的表面令其在不同环境中能够更为灵活的运动。因此,将软体机器人与可穿戴设备结合用以帮助特殊人群完成生理活动。哈佛大学的软体机器人手套(图10)利用软体致动器组成的模压弹性腔与纤维增强,诱导特定的弯曲,能够使肌肉或者神经受损的患者独立把握物体。研究者们对这些软致动器进行机械编程,以匹配和支持使用者个别手指的精确运动。与此相似的还有拇指柔性康复手套。除小型的穿戴设备外,还出现了步态协助软机器人exosuit这样覆盖全身的大型可穿戴设备。它可以像正常的衣服一样佩戴,最大限度减少与穿着者的相互干涉,对穿戴者起到辅助作用。目前,中国已经成为世界上老年人口最多的国家,也是人口老龄化发展速度最快的国家之一。中国正逐步进入老龄化社会,加之社会经济的稳步发展,大众对于服务机器人的需求日益增长,而软体机器人作为此类型机器人中的佼佼者,在人机交互和康复领域有着广泛运用,更应受到更加广泛的关注。因此,大力发展软体机器人应用技术,提高研发水平,早日实现其在人机交互及康复领域的运用和普及,满足社会发展及市场的需求。
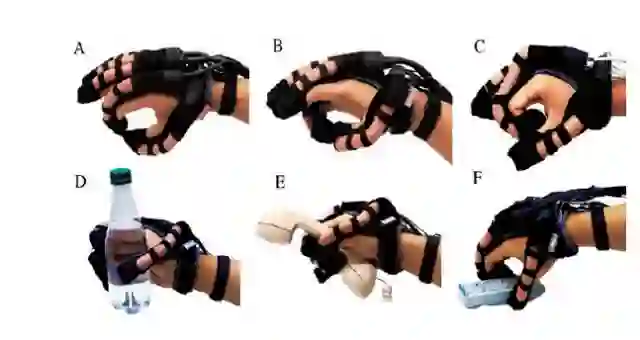
图10 软体机器人手套
勘探、野外运动。在地震、洪水等自然灾害发生时,抑或遇到悬崖、岩洞、海底等复杂未知环境,用机器人代替人类工作就显得十分必要。传统的刚体或超冗余度机器人对复杂环境的适应能力不足以承担日趋精密的勘探任务,而软体机器人则可以利用自身柔软、弯曲程度高、自由度大等优势很好地适应不同的复杂环境,承担起勘探、救援、侦查等工作。一种柔软可变形机器人(图11)可以通过爬行、跳跃等方式在崎岖的地形中轻松自如地移动。此外,利用内燃爆炸驱动的方式,机器人可以不受限制地跳跃通过各种障碍。在水下,柔软的尾鳍推进机器鱼可以像鱼一样潜水、摆尾、游动,进而完成水底勘探、搜寻等工作。而仿生章鱼机器人运用仿生学原理,可以通过狭小的通道并利用非结构化的触手在曲折的地面前进或作出抓取动作。此外,斯坦福大学研发了一款新的软体机器人Vine-link robot(图12)。此机器人全身由薄的软塑料包裹而成,形成类似于管状的躯体,且有部分向内折叠。科学家通过固定端往机器人的躯体内注入压缩空气,通过流体驱动的方式将内部折叠部分展开膨胀,致使躯体延伸并按照设定方向前进。在研究人员公布的资料中,Vine-link robot可以举起100 kg的木箱,以各种蜿蜒曲折的姿态通过不同的障碍物,并可以抵御火焰的高温。在Vine-link robot顶端安装摄像头,可以通过实时的画面传输获取机器人所在环境信息,配合机器人柔软躯体带来的灵敏性,完成相应勘探或救援任务。在未来勘探救援领域,软体机器人可发挥重要作用。
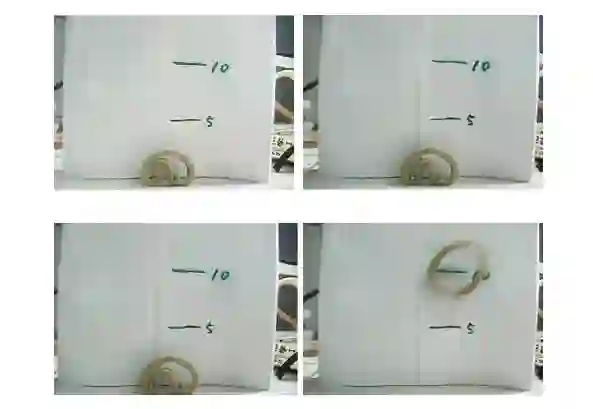
图11 软体可变形机器人
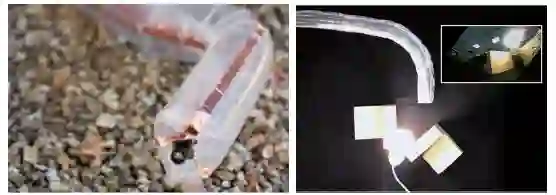
图12 会生长的软体机器人
医疗和手术应用。软机器人天生具有与生物体的自然组织兼容的优势。微创外科手术(MIS)为软体机器人提供了一个巨大的舞台。软体机器人能够突破传统微创外科手术方法的局限,如低自由度的操作设备给手术带来的限制。伦敦大学研制的刚度可控的章鱼状微创外科手术机器人手臂(图13)运用了仿生学原理,根据手臂机械性能的需要通过控制机械手臂的刚度更好地配合手术进行,柔软的材质将手术的伤害降到最低。此外,哈佛大学实验室研发的气动人工心脏,冈山大学的仿蠕虫自主推进式内窥镜可用于检查病人身体内部情况,这种柔软的内窥镜对人体伤害几乎为零。在手术室中,机器人系统广泛运用于软、硬组织手术。而软体机器人依靠自身的优势特性,能够有效地辅助外科医生的实际操作,使得手术更加精确、伤口更小、流血更少,术后恢复所需时间更短。当下,在“互联网+”这一新的经济形态推动下,现代通信技术同医疗领域结合已成为推动医疗卫生改革发展的重要环节。而软体机器人同现代通信技术的结合与应用,将极大改善医生手术时的设备条件,使远程手术的现实与普及成为可能,更将推进国民医疗卫生保障体系的建设,为看病难、医疗资源分布不均等问题的解决提供了新的思路。
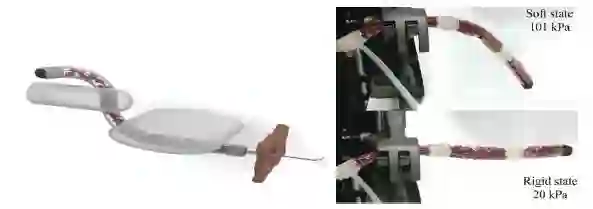
图13 刚度可控的章鱼状微创外科手术机器人手臂
软体机器人这一全新的研究思路,开启了一个令人兴奋的机器人技术新方向,在近年来取得了长足的进步。但是,作为一门新兴技术,软体机器人技术的发展涉及材料科学、生物工程、机电、控制等多个学科,从材料选择、动力输出、模型构筑、实际运用等方面还有着许多问题等待着研究者深入探讨。
现有的软体材料如SMA、水凝胶、IPMC 等已经趋近成熟,并推动软体机器人的发展,但这些材料在应力、应变、寿命、价格等方面仍然存在缺陷,不能满足软体机器人高速发展的现状。软体机器人通过仿生学实现其适应性、弹性与流变特性,可考虑将其与生物材料直接联系,通过合成材料与生物材料联合、材料科学与生物工程科学有机结合,开发出更具生物相容性和生命性的新型软体材料。可以预见,由天然肌肉组织和软体电子材料等组成的合成细胞将代替现有的软体材料进一步推动软体机器人的发展。
理论上,软体机器人可以实现无限自由度的运动,这也是相较于传统刚性机器人的优势所在。然而,受限于驱动方式和致动器数量,要精确控制机器人的运动需要大量传感器数据反馈与处理,在实际运用中难以保证控制实时性。因此,强化仿生智能控制算法研究成为软体机器人研究的新热点,通过有效计算控制机器人移动、机体刚度与形变程度,更好地适应多变的环境,构建更加智能的机器人。
在中国,软体机器人在勘探、医疗、养老等多个领域有着重要的用途与发展前景,但高昂的生产成本依旧制约着这项新技术的普及。为了实现商业上的可行性和在实际运用中的普及,软体机器人还应朝着廉价与大规模化生产的方向发展。随着激光微加工、计算机数字化控制(CNC)数控加工和3D打印等新技术新工艺的蓬勃发展,这些方法正逐步运用至软体机器人的制造加工中,将极大地降低机器人的生产成本。此外,人工肌肉、皮肤和支持机械运用的神经系统可以通过模板光刻、喷墨打印等技术运用在机械生产中,也为软体机器人的商业化发展带来了新的思路。
在世界经济整体低迷的时代背景下,中国经济面对着较大的下行压力,经济增速变缓,但是经过长时间发展的国内制造业水平已经获得明显提升,以软体机器人为代表的高端制造行业正准备迎来快速增长期,并极有可能成为引爆中国经济的又一个切入点。
随着软体机器人向着更深更远的方向发展以及智能化水平的提高,其应用将对医疗卫生、养老康复、勘探救援等领域产生颠覆式的影响。由此来看,中国软体机器人产业大有可为。
☞来源: 科技导报
☞作者: 侯涛刚,王田苗等

往期回顾|003讲中民国际资本执行董事刘国清-数字化工厂与人工智能
往期回顾|005讲甘中学——从智能工业机器人到智慧工业机器人
往期回顾|006讲长江学者王树新——微创手术机器人技术创新与产业发展
往期回顾|007讲哈工大教授杜志江——国产手术机器人的研究体会
往期回顾|008讲80后博导齐俊桐--无人机智能控制前沿技术
一堂课下潜深海7000米!揭秘罕见黑暗生物链+蛟龙号“龙脑”
意向合作,文章转载, 均可联系堂博士电话:13810423387(同微信)。
以上需求均可联系微信:35735796。


登录查看更多
相关内容

Arxiv
3+阅读 · 2019年9月3日
Arxiv
6+阅读 · 2019年2月25日
Arxiv
9+阅读 · 2018年1月25日




相关VIP内容
相关资讯
相关论文
Arxiv
3+阅读 · 2019年9月3日
Arxiv
6+阅读 · 2019年2月25日
Arxiv
9+阅读 · 2018年1月25日