会员精选 | 激光雷达的全固态之路

本文为【新智驾会员计划】第 21 期内容,「大咖Live」第 5 讲实录整理。
新智驾推荐:
“激光雷达是自动驾驶汽车不可缺少的传感器。”这是创始人姜波口中,饮冰科技选择激光雷达创业的出发点,也是很多自动驾驶从业人员的一个重要共识。
在自动驾驶汽车中,用或不用激光雷达一直是一个争论不休的问题,用是出于安全的需要,不用是有关成本的考量,但在得出结论之前,全面了解这一自动驾驶汽车最重要的传感器显然至关重要。
本期大咖 Live,姜波对激光雷达的前世今生以及未来发展都做出了详细梳理和阐述。
他首先从激光雷达发展的源头即无线电雷达讲起,解释了激光雷达与雷达的分别,进而重点讲解了激光雷达的发展趋势以及固态激光雷达的详细方案,剖析了 Flash-LiDAR 的优势与困难,同时也分享了饮冰在全固态激光雷达方面的探索与进展。
最后,对于目前行业中关于激光雷达的疑问,他也进行了一一解惑,如果你对激光雷达还一知半解或需要更多深度知识补充,本文或许可以提供一次最全面参考。
以下为「大咖Live」实录摘选:
从无线电雷达说起
相信大家都看过《敦刻尔克》这部电影,它让二战那段历史重新进入大家视野。讲起二战欧洲战场就少不了要说起不列颠空战,不列颠空战大概分为四个阶段,在 1940 年 7 月-10 月,不列颠空战的最关键阶段,德国一共出动了约 4.6 万架次飞机,投弹 6 万吨,被击落各型飞机 1733 架,损失空行人员 6 千人;而英国飞机共损失 915 架,飞行员 414 人,双方飞机损失比为 0.5:1,飞行员损失比是 0.069 : 1。
事实上,德国的战机性能和飞行员素质是高于英国的,可为什么赢得战争的是英国人?其中一个重要原因就是英国人有雷达。
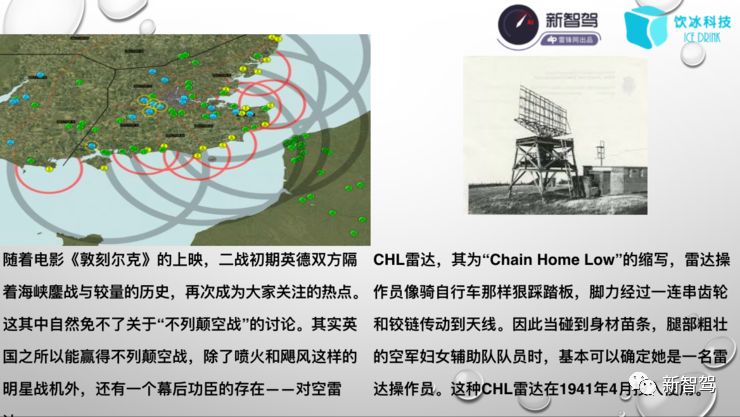
上图左边就是当时在英吉利海峡部署对空警戒的雷达阵位,每个小黄点是一部雷达,红线是雷达能覆盖的区域。我们可以看到,德国飞机还没有进入英国领空,就会被英国人利用雷达发现,飞机的数量、航向都在英国掌握之中,后者就可以针对性地起飞战机进行拦截,飞行员可以以逸待劳,不用长时间在空中巡逻。
最早的雷达是 1935 年英国部署的,叫本土链雷达,后来二战中又部署了地空本土链,也就是我们讲的雷达,上图的右边。
雷达第一次登上历史舞台,就发挥了非常重要的作用,后来在太平洋战争中,又帮助美国海军打赢了日本。
雷达的主要功能是什么?一个是测距,一个是侧角。
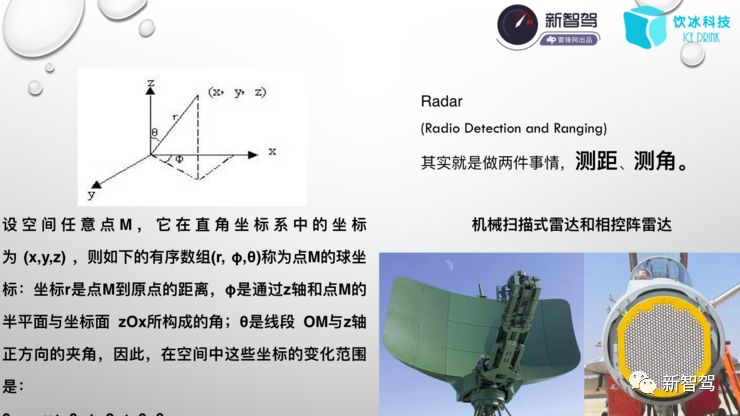
来看一下上面这张图的左边,这是一个极坐标系,我们可以通过一个距离和两个角度来确定空间的唯一一个点,各种各样的雷达都是在想办法测出这三个参数。
雷达测距将无线电波发射出去,如果遇到目标就会反射回来,由于电磁波的传播速度是一定的,只需要知道无线电波的飞行时间就可知道目标距离,而目标角度可以通过无线电波的指向来确定。
雷达都是有天线的,为的就是集中无线电波的能量向一个方向发射。这一点和广播完全不一样,广播是向四周辐射。波束窄了,要覆盖一定空域,让波束扫描起来最简单的方法就是机械旋转,一个电机带着天线旋转就可以了,可是这样太慢了,好不容易发现一个目标,要再转一圈儿才能重新测量一次,而且旋转机构的可靠性也比较差。
人们非常聪明地发明了相控阵雷达,这种雷达没有旋转机构,是靠密密麻麻排列的 T/R 组件来实现波束扫描的,其具体原理和光学相控阵雷达一样,上面右下角两张图,左边是一种机械旋转雷达,右边是战斗机用的相控阵雷达。
可能有人会问,我们为什么要从无线电雷达讲起,因为激光雷达就是完完全全脱胎于无线电雷达技术。
电磁波
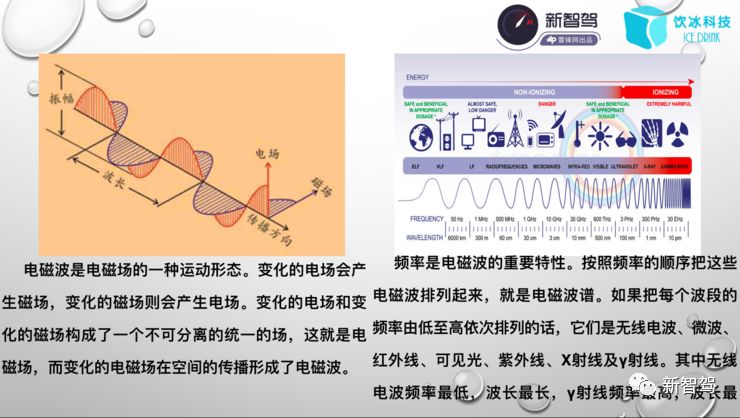
变化的电场会产生磁场,变化的磁场会产生电场,然后电场又产生磁场,磁场又产生电场,这样反反复复,合起来,就产生了电磁场,变化的电磁场在空间传播就是电磁波。
上面左边这张图,红色的是电场,蓝色的是磁场。通过这张图也可以看到,电磁场的变化是周期性的,这个周期的空间长度就是波长。
光速也就是电磁波传播的速度,光速除以波长就是电磁波频率。频率是电磁波非常重要的特性,按照频率顺序,把这些电磁波排列起来就是电磁波谱。如果把每个波段的频率由低至高依次排列,它们是:无线电波,微波,红外线,可见光,紫外线,X 射线,γ 射线。其中,无线电波频率最低,波长最长,γ 射线频率最高,波长最短。无线电和光的本质都是电磁波......
本文为【新智驾会员计划】第 21 期内容,阅读完整文章,欢迎加入我们的会员计划,点击下方“阅读原文”即可跳转新智驾会员官网。
欢迎在新浪微博、网易号、今日头条、天天快报、UC 头条、搜狐号、一点资讯关注@新智驾。
推荐阅读:
5月份,图灵奖得主门生、OURS CEO谭章熹,前百度副总裁、宽凳科技创始人兼CEO刘骏,煜炜光学首席技术专家张石,饮冰科技创始人兼总经理姜波四位嘉宾,分别从硅光芯片、可量产激光雷达地图定位及其他模块、实现固态激光雷达芯片量产等角度,分享了宝贵的从业经验,点击图片可查看过去一周的会员精选。
6月,我们将推出「智能驾驶-视觉专场」,4位神秘大咖将陆续现身分享,敬请期待。




