【极市打榜】算法竞赛/打榜通用技巧总结(附源码)

极市导读
极市打榜是面向计算机视觉开发者的算法竞技,参与者人人都可以通过提高算法分数(精度+性能分)获得早鸟奖励+分分超越奖励,排行榜前三名的胜利者将有机会获得该算法的极市复购订单,获得持续的订单收益。
提供免费算力+真实场景数据集;早鸟奖励+分分超越奖励+持续订单分成,实时提现!
前言

模型选取
-
目标检测 -
Yolo系列:yolov5, yolo4, yolov3等 -
SSD -
nanodet -
yolox -
语义分割 -
BiSeNet -
STDC -
目标追踪 -
yolov5+deepsort -
视频(动作)分类 -
TSM -
SlowFast -
x3d
编码和训练
-
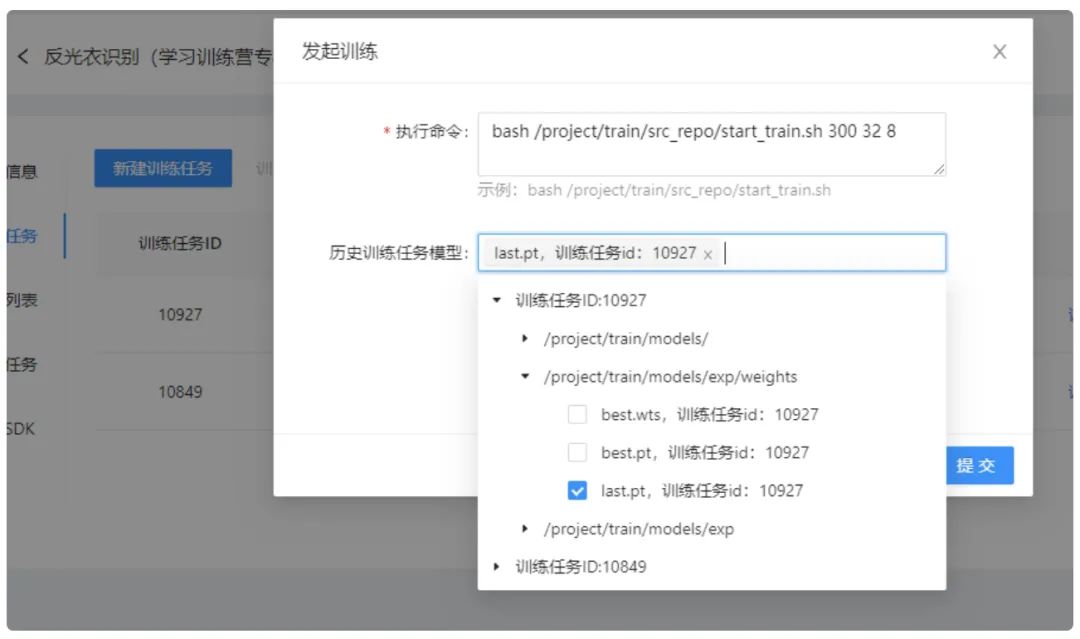
结果图可保存在 /project/train/result-graph,那么训练完成后即可在训练页面查看

-
将训练的保存路径设置为 /project/train/models,那么训练终止后,从保存的模型重新加载后,仍然可以恢复训练
-
可以对随机划分数据集设置随机数种子,以保证每次训练的数据都是一致的
random.seed(
1)
-
如果github下载过慢,这里我们可以使用一个镜像网址进行操作: hub.fastgit.org,例如将
git
clone https://github.com/ExtremeMart/ev_sdk.git
wget https://github.com/ExtremeMart/dev-docs/archive/refs/tags/v3.0.3.zip
git
clone https://hub.fastgit.org/ExtremeMart/ev_sdk.git
wget https://hub.fastgit.org/ExtremeMart/dev-docs/archive/refs/tags/v3.0.3.zip
-
如果遇到资源不足导致实例打开失败,可尝试多次启动实例,如果还是不行,可以尝试重建实例。
测试
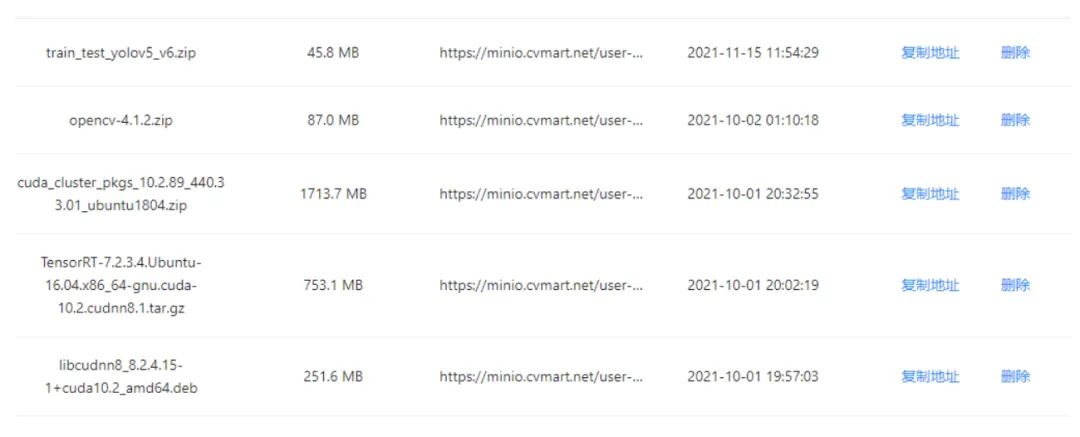
pip install nvidia-pyindex
pip install nvidia-tensorrt pycuda
cd /usr/
local
# install cuda10.2
mkdir temp &&
cd temp && wget https://minio.cvmart.net/user-file/9876/886bcb1539b2460f8938f63fb5643356.zip && unzip 886bcb1539b2460f8938f63fb5643356.zip
dpkg -i libxnvctrl0_440.33.01-0ubuntu1_amd64.deb libxnvctrl-dev_440.33.01-0ubuntu1_amd64.deb cuda-cluster-runtime-10-2_10.2.89-1_amd64.deb cuda-cluster-devel-10-2_10.2.89-1_amd64.deb nsight-compute-2019.5.0_2019.5.0.14-1_amd64.deb NsightSystems-linux-public-2019.5.2.16-b54ef97.deb
cd ../ && rm -rf temp cuda cuda-10.1 && ln -s /usr/
local/cuda-10.2 /usr/
local/cuda
# install cudnn8.1
wget https://minio.cvmart.net/user-file/9876/0e24bccb454b4f54aedb9395ff781691.deb && dpkg -i 0e24bccb454b4f54aedb9395ff781691.deb
# install TensorRT7.2.3
wget https://minio.cvmart.net/user-file/9876/10e90f8459754eebbabe0e95026f0119.gz && tar -xf 10e90f8459754eebbabe0e95026f0119.gz
echo
"export LD_LIBRARY_PATH=/usr/local/TensorRT-7.2.3.4/lib:$LD_LIBRARY_PATH" >> ~/.zshrc &&
source ~/.zshrc
rm 10e90f8459754eebbabe0e95026f0119.gz 0e24bccb454b4f54aedb9395ff781691.deb
# build opencv-4.1.2
cd /home
wget https://minio.cvmart.net/user-file/9876/e695f9548daa4fd7a942691505bb3d94.zip && unzip e695f9548daa4fd7a942691505bb3d94.zip && rm e695f9548daa4fd7a942691505bb3d94.zip
cd opencv-4.1.2 && mkdir build &&
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/
local -D OPENCV_EXTRA_MODULES_PATH=/home/opencv_contrib -D PYTHON_DEFAULT_EXECUTABLE=/usr/bin/python3 -D BUILD_opencv_python3=OFF -D BUILD_opencv_python2=OFF -D PYTHON3_EXCUTABLE=/usr/bin/python3 -D WITH_CUDA=OFF -D OPENCV_GENERATE_PKGCONFIG=ON ..
make -j8
make install
-
更改测试输入尺寸,可以加速网络运行速度,但是可能会降低精度。 -
测试时,可以更改置信度等参数,去寻找更好的测试结果。 -
由于目前平台不支持测试备注,因此我们可以用文档记录每次所改的测试参数。
快速部署
例子
-
配置好训练环境和测试环境, 可参考前面。 -
对数据集进行转换,得到yolo格式的数据集,并划分数据集。
from __future__
import division
from __future__
import print_function
from __future__
import absolute_import
import os
import sys
import shutil
import pathlib
import random
import xml.etree.ElementTree
as ET
import io
from global_config
import *
train_data_dir = os.path.join(project_root,
'dataset/images/train/')
valid_data_dir = os.path.join(project_root,
'dataset/images/valid')
annotations_train_dir = os.path.join(project_root,
'dataset/labels/train')
annotations_valid_dir = os.path.join(project_root,
'dataset/labels/valid')
supported_fmt = [
'.jpg',
'.JPG']
def convert_box(size, box):
dw =
1. / (size[
0])
dh =
1. / (size[
1])
x, y, w, h = (box[
0] + box[
1]) /
2.0 -
1, (box[
2] + box[
3]) /
2.0 -
1, box[
1] - box[
0], box[
3] - box[
2]
return x * dw, y * dh, w * dw, h * dh
def xml_to_yolo(data_list,annotations_dir):
"""将data_list表示的(图片, 标签)对转换成yolo记录
"""
xml_list = []
for data
in data_list:
out_file = open(os.path.join(annotations_dir, os.path.basename(data[
'label']).replace(
'.xml',
'.txt')),
'w')
tree = ET.parse(data[
'label'])
root = tree.getroot()
size = root.find(
'size')
w = int(size.find(
'width').text)
h = int(size.find(
'height').text)
for obj
in root.iter(
'object'):
# difficult = obj.find('difficult').text
cls = obj.find(
'name').text
if cls
not
in classes:
#or int(difficult) == 1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find(
'bndbox')
b = (float(xmlbox.find(
'xmin').text), float(xmlbox.find(
'xmax').text), float(xmlbox.find(
'ymin').text), float(xmlbox.find(
'ymax').text))
bb = convert_box((w, h), b)
out_file.write(str(cls_id) +
" " +
" ".join([str(a)
for a
in bb]) +
'\n')
out_file.close()
if __name__ ==
'__main__':
os.makedirs(project_root, exist_ok=
True)
os.makedirs(train_data_dir, exist_ok=
True)
os.makedirs(valid_data_dir, exist_ok=
True)
os.makedirs(annotations_train_dir, exist_ok=
True)
os.makedirs(annotations_valid_dir, exist_ok=
True)
if
not os.path.exists(sys.argv[
1]):
print(
f'{sys.argv[1]} 不存在!')
exit(
-1)
# 遍历数据集目录下所有xml文件及其对应的图片
dataset_path = pathlib.Path(sys.argv[
1])
found_data_list = []
for xml_file
in dataset_path.glob(
'**/*.xml'):
possible_images = [xml_file.with_suffix(suffix)
for suffix
in supported_fmt]
supported_images = list(filter(
lambda p: p.is_file(), possible_images))
if len(supported_images) ==
0:
print(
f'找不到对应的图片文件:`{xml_file.as_posix()}`')
continue
found_data_list.append({
'image': supported_images[
0],
'label': xml_file})
# 随机化数据集,将数据集拆分成训练集和验证集,并将其拷贝到/project/train/src_repo/dataset下
random.seed(
1)
random.shuffle(found_data_list)
train_data_count = len(found_data_list) *
4 /
5
train_data_list = []
valid_data_list = []
for i, data
in enumerate(found_data_list):
if i < train_data_count:
# 训练集
dst = train_data_dir
data_list = train_data_list
else:
# 验证集
dst = valid_data_dir
data_list = valid_data_list
image_dst = (pathlib.Path(dst) / data[
'image'].name).as_posix()
label_dst = (pathlib.Path(dst) / data[
'label'].name).as_posix()
shutil.copy(data[
'image'].as_posix(), image_dst)
shutil.copy(data[
'label'].as_posix(), label_dst)
data_list.append({
'image': image_dst,
'label': label_dst})
#xml to yolo
xml_to_yolo(train_data_list, annotations_train_dir)
xml_to_yolo(valid_data_list, annotations_valid_dir)
print(
'Successfully converted xml to yolo.')
-
用 yolov5 对数据集进行训练,通过调参获得一个最好的模型。
#!/bin/bash
# 创建默认目录,训练过程中生成的模型文件、日志、图必须保存在这些固定目录下,训练完成后这些文件将被保存
rm -rf /project/train/models/result-graphs && rm -rf /project/train/
log && rm -rf /project/train/src_repo/dataset
mkdir -p /project/train/result-graphs && mkdir -p /project/train/
log
project_root_dir=/project/train/src_repo
dataset_dir=/home/data
log_file=/project/train/
log/log.txt
if [ ! -z
$1 ];
then
num_train_steps=
$1
else
num_train_steps=10
fi
if [ ! -z
$2 ];
then
batch_size=
$2
else
batch_size=16
fi
if [ ! -z
$3 ];
then
workers=
$3
else
workers=2
fi
echo
"Converting dataset..." \
&& python3 -u
${project_root_dir}/convert_dataset.py
${dataset_dir} | tee -a
${log_file} \
&&
cd
${project_root_dir} && cp data.yaml yolov5/data/ \
&& pip install -i https://mirrors.cloud.tencent.com/pypi/simple -r /project/train/src_repo/yolov5/requirements.txt \
&&
echo
"Start training..." \
&&
cd yolov5 && python3 -u train.py --data data.yaml --project /project/train/models --batch-size
${batch_size} --epochs
${num_train_steps} --workers
${workers} 2>&1 | tee -a
${log_file} \
&&
echo
"Done!!!" \
&&
echo
"Copy result images to /project/train/result-graphs ..." \
&& cp /project/train/models/exp/*.jpg /project/train/models/exp/*.png /project/train/result-graphs | tee -a
${log_file} \
&&
echo
"Finished!!!"
-
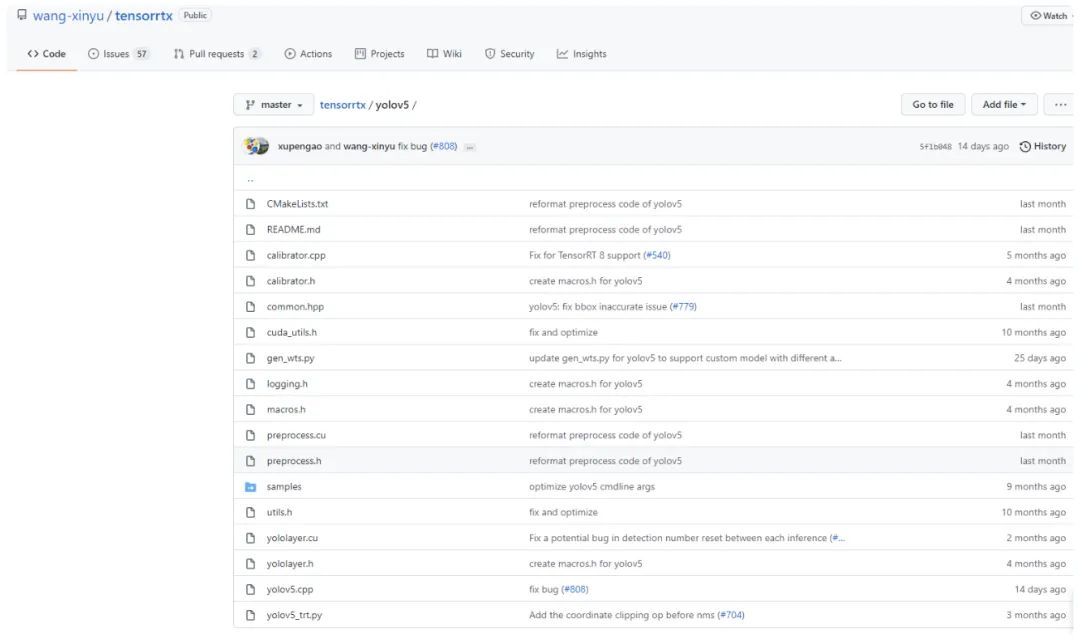
参考github的tensorrtx对模型进行转换,以及完成sdk的代码编写。
from __future__
import print_function
import logging
as log
import os
import pathlib
import json
import cv2
import numpy
as np
import time
from yolov5_trt
import YoLov5TRT, warmUpThread
# For objection detection task, replace your target labels here.
categories = [
'reflective_vest',
'no_reflective_vest',
'person_reflective_vest',
'person_no_reflective_vest']
def init():
"""
Initialize model
Returns: model
"""
engine_file_path =
"/project/ev_sdk/model/best.engine"
yolov5_wrapper = YoLov5TRT(engine_file_path)
try:
#warm up
for i
in range(
5):
# create a new thread to do warm_up
thread1 = warmUpThread(yolov5_wrapper)
thread1.start()
thread1.join()
finally:
# destroy the instance
yolov5_wrapper.destroy()
return yolov5_wrapper
def process_image(net=None, input_image=None, args=None, **kwargs):
"""Do inference to analysis input_image and get output
Attributes:
net: model handle
input_image (numpy.ndarray): image to be process, format: (h, w, c), BGR
thresh: thresh value
Returns: process result
"""
if
not net
or input_image
is
None:
log.error(
'Invalid input args')
return json.dumps({
'model_data':{
'objects':[]}})
data = net.infer((x
for x
in [input_image]))[
0]
res_json={
'model_data':dict()}
if data[
0]
is
None:
return json.dumps({
'model_data':{
'objects':[]}})
else:
detect_objs = []
for i
in range(len(data[
0])):
xyxy, conf, cls = data[
0][i], data[
1][i], int(data[
2][i])
detect_objs.append({
'name': categories[cls],
'xmin': int(xyxy[
0]),
'ymin': int(xyxy[
1]),
'xmax': int(xyxy[
2]),
'ymax': int(xyxy[
3]),
'confidence': float(conf)
})
res_json[
'model_data'][
'objects'] = detect_objs
return json.dumps(res_json)
if __name__ ==
'__main__':
# Test API
img = cv2.imread(
'/project/ev_sdk/data/test.jpg')
predictor = init()
import time
s = time.time()
for i
in range(
20):
res = process_image(predictor, img)
e = time.time()
print(res)
print((e-s)/
20)
-
更改阈值或者输入尺寸参数,进行测试得到最优结果。
总结
如果觉得有用,就请分享到朋友圈吧!
公众号后台回复“transformer”获取最新Transformer综述论文下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~

登录查看更多
相关内容

Arxiv
10+阅读 · 2018年1月29日



相关VIP内容
相关资讯
相关论文
Arxiv
10+阅读 · 2018年1月29日