【泡泡一分钟】高质量三维重建的多视图非刚性细化与法线选择(ICCV2017-250)
每天一分钟,带你读遍机器人顶级会议文章
标题:Multi-view Non-rigid Refinement and Normal Selection for High Quality 3D Reconstruction
作者:Sk. Mohammadul Haque, Venu Madhav Govindu
来源:International Conference on Computer Vision (ICCV 2017)
编译:王嫣然
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

近年来,通过融合包含良好低频和高频信息的深度图与法线图来实现高质量三维重建的方法有许多。通常,这些方法会创建正在被扫描的完整对象或场景的初始网格表示。随后,将法线估计分配给每个网格顶点,并执行网格法线融合步骤。
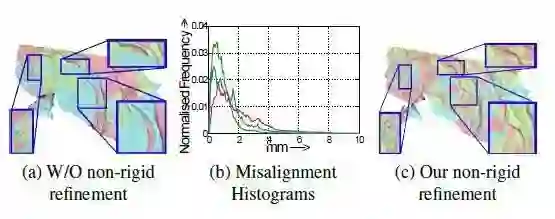
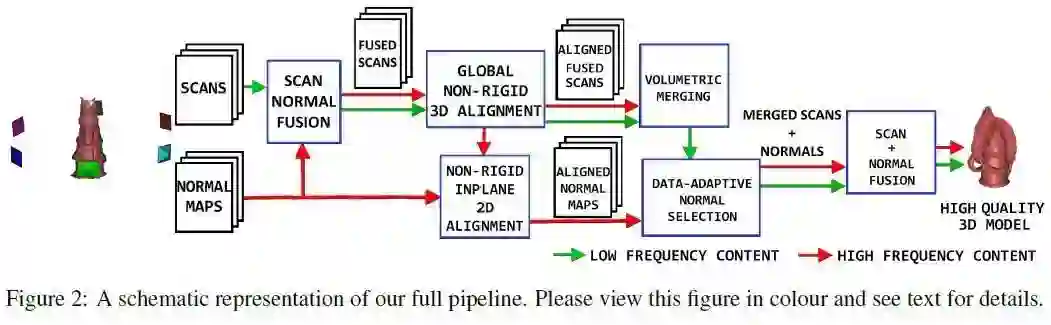
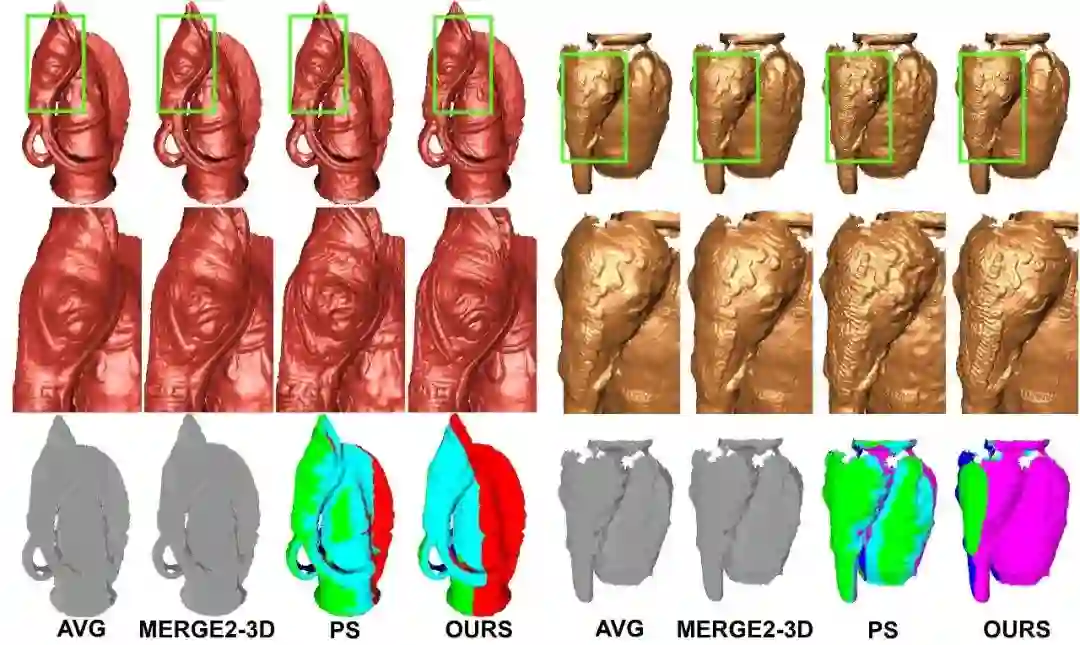
本文提出了一个完整的深度法线融合过程。该方法具有两点创新。首先,本文引入全局多视图非刚性细化步骤,该步骤用于校正深度图与法线图中存在的非刚性偏差。实验证明这种校正对于在最终重建中保留精细尺度的3D特征至关重要。其次,尽管处理过程谨慎,多个法线的平均值也会导致3D细节模糊。因此,本文提出了一种从多个可用法线中选用一个的方法来缓解这一问题。
本文展示了所提方法在合成和真实3D模型中进行高质量三维重建的效果,并与文献中现有方法进行了对比。

Abstract
In recent years, there have been a variety of proposals for high quality 3D reconstruction by fusion of depth and normal maps that contain good low and high frequency in- formation respectively. Typically, these methods create an initial mesh representation of the complete object or scene being scanned. Subsequently, normal estimates are as- signed to each mesh vertex and a mesh-normal fusion step is carried out. In this paper, we present a complete pipeline for such depth-normal fusion. The key innovations in our pipeline are twofold. Firstly, we introduce a global multi- view non-rigid refinement step that corrects for the non- rigid misalignment present in the depth and normal maps. We demonstrate that such a correction is crucial for pre- serving fine-scale 3D features in the final reconstruction. Secondly, despite adequate care, the averaging of multiple normals invariably results in blurring of 3D detail. To miti- gate this problem, we propose an approach that selects one out of many available normals. Our global cost for normal selection incorporates a variety of desirable properties and can be efficiently solved using graph cuts. We demonstrate the efficacy of our approach in generating high quality 3D reconstructions of both synthetic and real 3D models and compare with existing methods in the literature.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




