机器人见多了,你见过机器船吗?MIT新版ROBOAT可以自动组装
机器之心报道
参与:路
「ROBOAT」是 MIT 和荷兰先进都市解决方案协会(AMS)协作的研究项目,内容是在阿姆斯特丹探索设计和试验世界上第一批自动驾驶船只。2016 年,研究者测试了 ROBOAT 原型。近期,研究者又开发了新功能:这些机器船可以自动连接,组装成临时水面基础设施,如桥梁、舞台和菜场等。相关研究已发表在 ICRA 2019 大会。
论文链接:http://www.particlerobots.com/luismateos/publications/LuisAMateos_ICRA2019_Autonomous_latching_system_for_robotic_boats.pdf
阿姆斯特丹运河是这座城市的重要标志,运河游船也是探索这座城市的最佳方式之一。现在,阿姆斯特丹设想了这样一种未来场景:运河河道上漂浮着大量自动船只,它们可以运载货物和人、收集垃圾,或者自组装成桥梁。为此,MIT 研究者给他们正在进行的机器船项目赋予了新能力:以彼此为目标并连接在一起,如果失败了则继续尝试直到成功。

MIT 研究者开发了一种新型锁闭系统(latching system),机器船可以克服水流干扰,高效安全地组装在一起。
被誉为「北方威尼斯」的阿姆斯特丹拥有 165 条运河道,它们环绕着繁忙的城市街道。几年前,MIT 和荷兰先进都市解决方案协会(AMS)开始合作「Roboat」项目,旨在构建自动机器船以提供水上智能交通,从而缓解城市街道的交通拥堵。这些机器船的船体是矩形的,配备有传感器、推进器、微处理器、GPS 模块、摄像头等硬件。
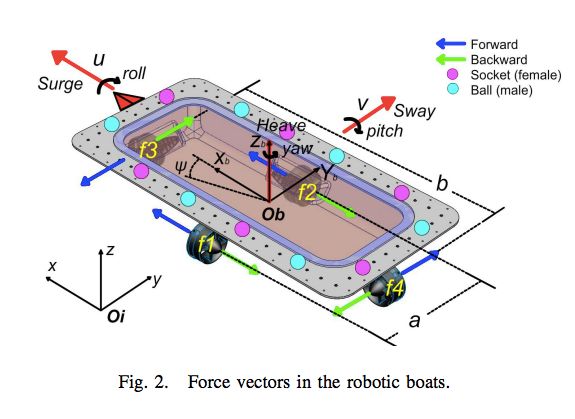
如图所示,该机器船船体为矩形(长宽比为 2:1,整个船体平台的维度为 1000mm×500mm× 150mm),每条边的中间分别有一个推进器(f1、f2、f3、f4)。船顶部是负责感知和定位的 VLP-16 激光雷达(见图 1)。该机器船还配备有 Intel Realsense 摄像头,用于检测标记,以及惯性测量单元装置(IMU),用于测量倾斜角和速率。
Roboat 项目的目标之一就是提供新的水上交通解决方案。另一个目标是用机器船自动组建桥梁、表演舞台甚至菜场等临时场地。这些由机器船组建的场地可以在固定时间后自动「解散」,再为某些具体活动而自动组合。此外,机器船还可以用作探测器,收集阿姆的基础设施、空气和水质等数据,为城市和市民健康提供重要信息。
2016 年,MIT 研究者测试了 roboat 原型,它可以在阿姆斯特丹的运河道里游弋,能够沿着预编程的路径前后移动。去年,研究者设计了低成本的 3D 打印机器船,大小仅为之前版本的 1/4,更加高效和灵活,它还配备了先进的轨迹追踪算法。
最近,该研究的相关论文发表在了 ICRA 大会上,研究者介绍了目前这些机器船可以识别「停靠点」(docking station)并与之连接。控制算法指引机器船向目标行进,它们可以自动连接至定制化锁闭装置(latching mechanism),且精度可达毫米级。此外,当机器船注意到自己没有与停靠点成功连接时,会重新开始尝试。
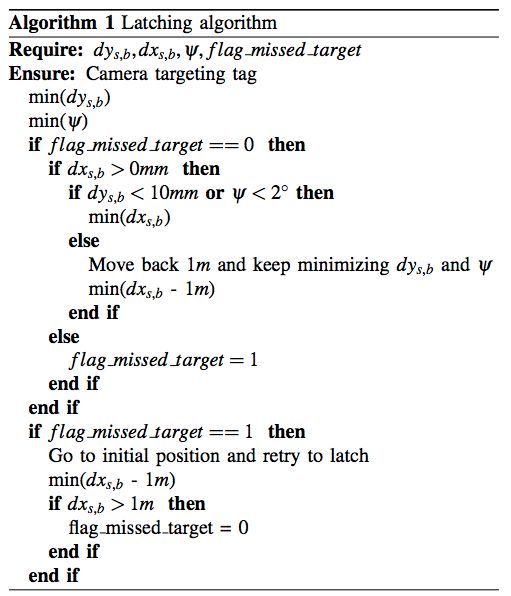
机器船连接时所用的算法,精度可达毫米级。
研究者在 MIT 的游泳池和水流稍微汹涌一些的查尔斯河里对这一锁闭技术进行了测试。在两个场景中,机器船通常能够在大约 10 秒内成功连接(从约 1 米外的位置开始尝试),或者会在几次失败后取得成功。
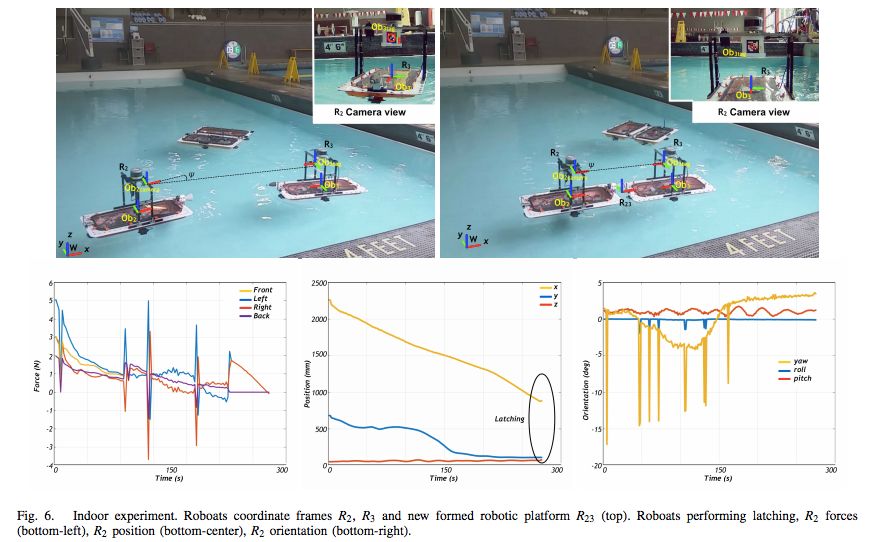
室内游泳池实验图示。
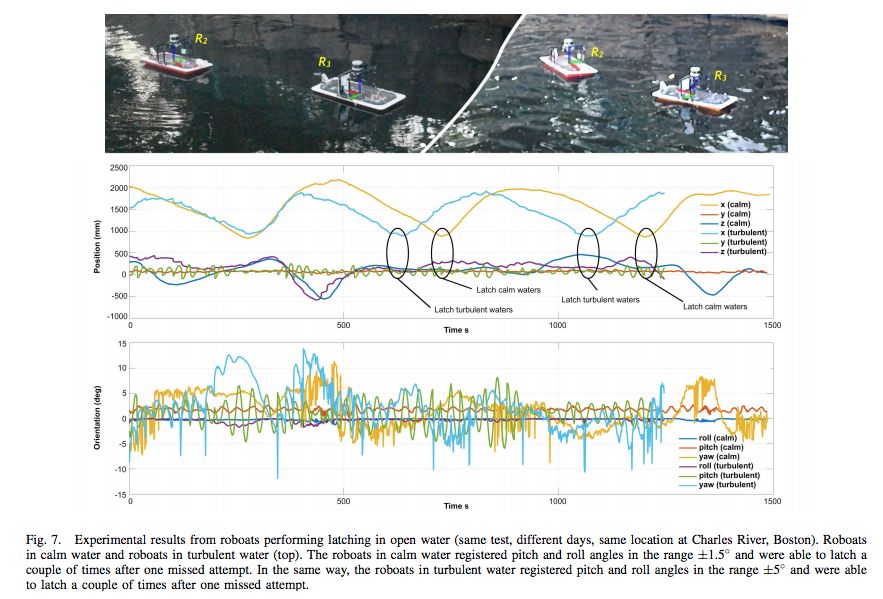
室外查尔斯河实验图示。
在阿姆,该系统对夜晚垃圾收集尤为有用。机器船可以在运河道中到处游走,定位并连接至有垃圾桶的平台,然后把它们拖回垃圾收集设施。
论文一作 Luis Mateos 表示:「阿姆以前主要的交通渠道是运河,现在则是道路。运河道附近的道路非常拥挤,还有很多噪声和污染,因此阿姆斯特丹试图将更多功能重新赋予运河。而自动驾驶技术可以节省时间、成本和能源,以及推动这座城市向前。」Luis Mateos 毕业于 MIT 城市研究与规划系,现在是 MIT Senseable City Lab 的研究员。
「该项目旨在通过机器船赋能水上生活,」论文合著者、MIT CSAIL 负责人 Daniela Rus 表示,「新的锁闭机制对于创建临时水上设施至关重要。机器船的水上自动交通是不需要锁闭机制的,但是创建临时水上设施需要,不管是移动设施还是固定设施。」
如何连接
每一条机器船配备有多个锁闭装置分布在船体前后及侧面,这些装置包括球(ball)和槽(socket)组件。球组件类似于羽毛球,形状为圆锥体,橡胶材料制成,顶端有一个金属球。槽组件是一个宽漏斗,可以指引球组件进入接收器(receptor)。在漏斗中,激光束作为安全系统,负责检测球进入接收器的时间。这就激发了一种机制:槽的三个臂围拢并捕捉到球,同时将表明船只连接已完成的反馈信号发送给两艘机器船。
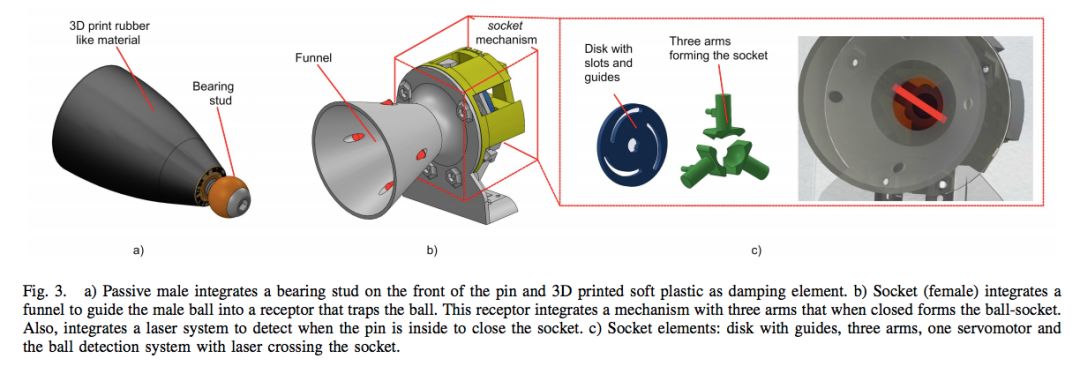
机器船锁闭装置中球组件和槽组件图示。
在软件方面,支持机器船运行的是自定义计算机视觉和控制技术。每条机器船都有一个激光雷达系统和摄像头,因此它们可以实现在运河道中点到点的自动移动。每一个停靠点(通常是不动的机器船)都有一些印有 AR 标记的纸,这些标记叫做 AprilTag,类似于简化版的二维码。AprilTag 常用于机器应用,它可以使机器人检测并计算标记的准确 3D 位置和方向。
AprilTag 和摄像头都安装在机器船中心的相同位置。当一条正在移动的机器船离静止 AprilTag 一两米远时,机器船会计算 AprilTag 的位置和方向。通常,这会生成船移动的 3D 地图,包括原地打转、上下颠簸和左右摇摆,不过算法不考虑「左右摇摆」,将 3D 空间简化为易于计算的 2D 平面,它可以衡量机器船摄像头与标记的距离和方向。基于这一信息,机器船能够朝着标记前进。然后通过使摄像头和标记完美对齐,来实现机器船的精确连接,如下图所示:
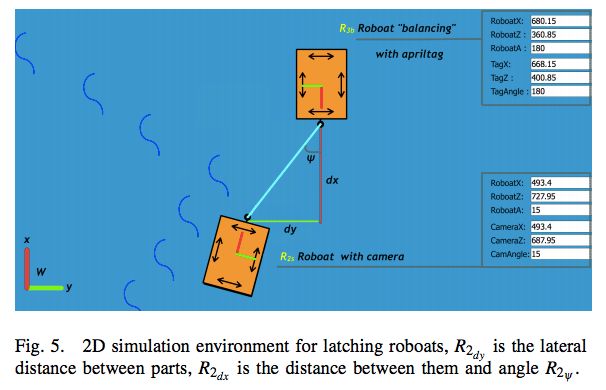
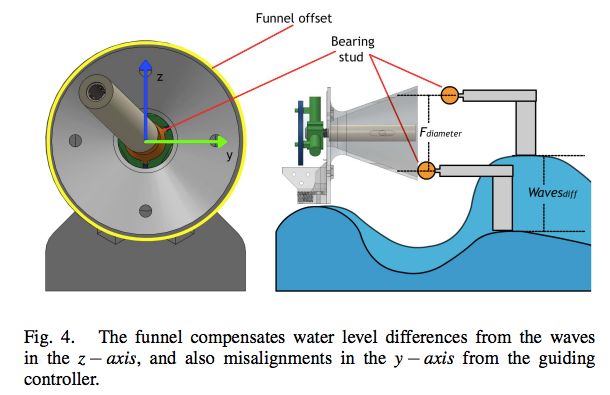
锁闭系统假设机器船和「停靠点」是在相似水平线上的,而漏斗可以弥补机器船上下颠簸和起伏造成的不对齐。
然而,如果机器船超出了可计算距离,则它无法接收到来自激光束的反馈信号,从而知道自己失败了。Mateos 表示:「在水况复杂的区域,目前大小的机器船无法克服强风或激烈的水流。然后机器船的逻辑组件就会说『你错过了目标,返回,重新计算位置,再次尝试。』」(见算法 1)
未来发展
目前,研究者正在设计当前版本四倍大小的机器船,这样它们在水上更加稳定。Mateos 还在更新漏斗,使它具备像触手一样的橡胶抓具,从而可以握紧金属球,就像章鱼抓住猎物一样。这将帮助机器船在拖着平台或其他机器船穿过狭窄的河道时能够更加稳定、更有控制力。
该研究还包括一个系统,它在 LCD 显示器上展示了 AprilTag 如何改变代码让多个机器船获取信号,从而以给定顺序自己组装起来。首先,所有机器船都得到一个代码:待在一米远的地方。然后,代码变更为「向要连接的第一只机器船前进」。之后,代码变更为「向要连接的下一只机器船前进」,依此类推。「这就像传声筒游戏。改变的代码将信息一次传向一条机器船,信息会告诉船应该如何做。」Mateos 表示。
意大利技术研究院先进机器人部门研究负责人 Darwin Caldwell 设想了自动锁闭能力的更多可能应用。「我可以想象到这种技术应用于机器『加油」和停靠等多个领域,而不只是船舶系统。空中加油、空间对接、货物集装箱处理和家庭机器人充电等等。」

参考链接:https://news.mit.edu/2019/autonomous-robot-boats-latch-0605
本文为机器之心报道,转载请联系本公众号获得授权。
✄------------------------------------------------
加入机器之心(全职记者 / 实习生):hr@jiqizhixin.com
投稿或寻求报道:content@jiqizhixin.com
广告 & 商务合作:bd@jiqizhixin.com





