7 Papers & Radios | 无人机3D打印登Nature封面;哈工大用微波驱控机器人
机器之心 & ArXiv Weekly Radiostation
参与:杜伟、楚航、罗若天
本周主要论文包括英国帝国理工学院用无人机 3D 打印房子;哈佛大学新型固态锂电池 3 分钟充满电,可循环超 10000 次。
-
Aerial additive manufacturing with multiple autonomous robots -
A dynamic stability design strategy for lithium metal solid state batteries -
Multi-Degree-of-Freedom Robots Powered and Controlled by Microwaves -
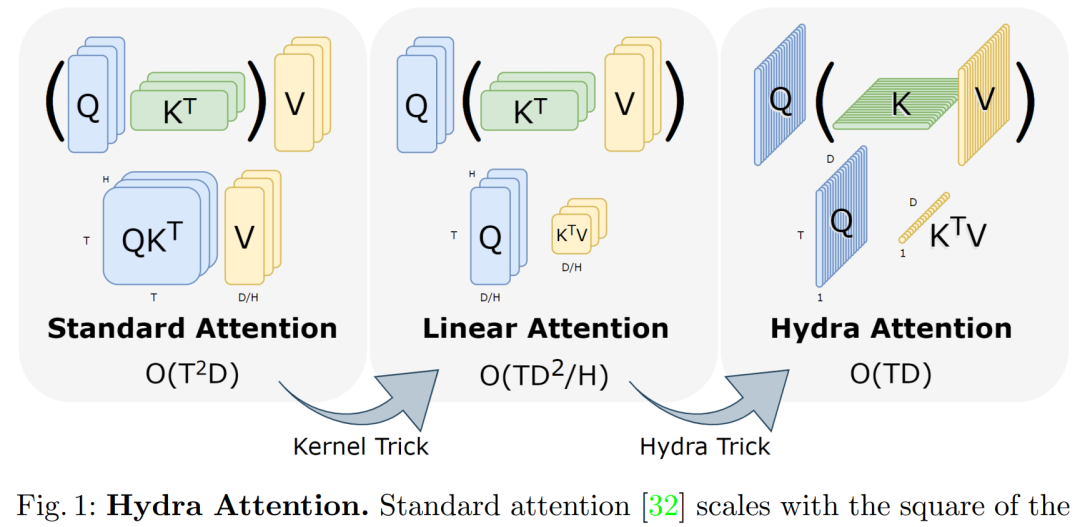
Hydra Attention: Efficient Attention with Many Heads -
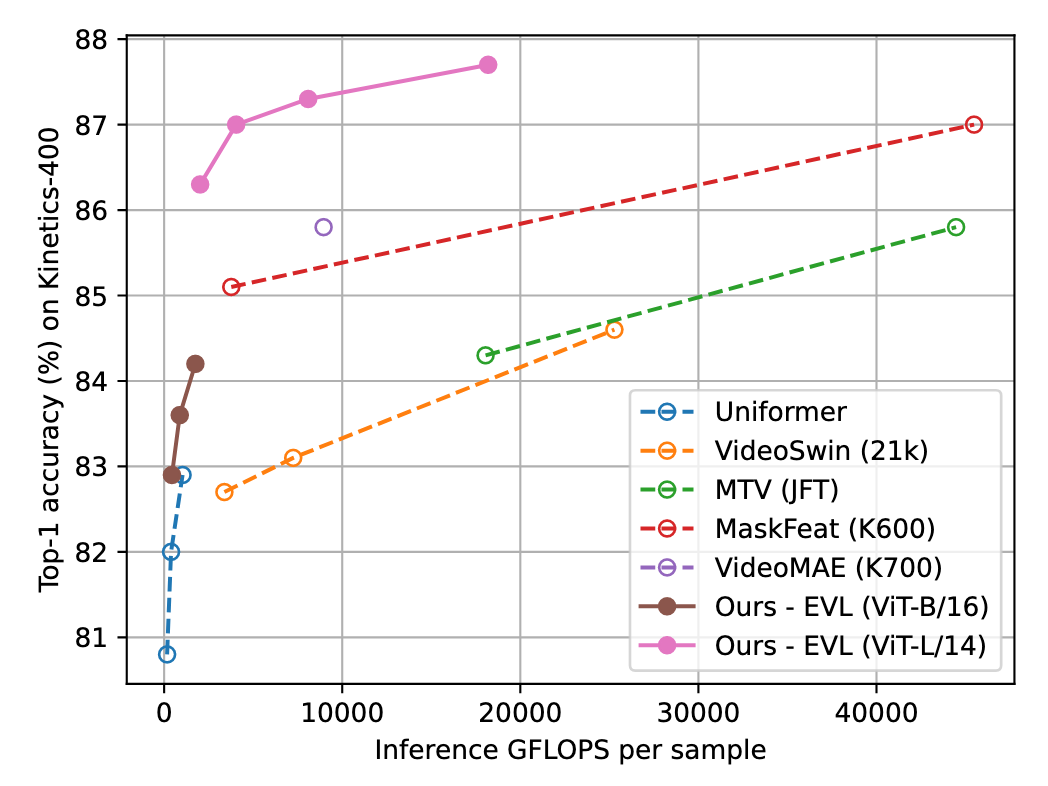
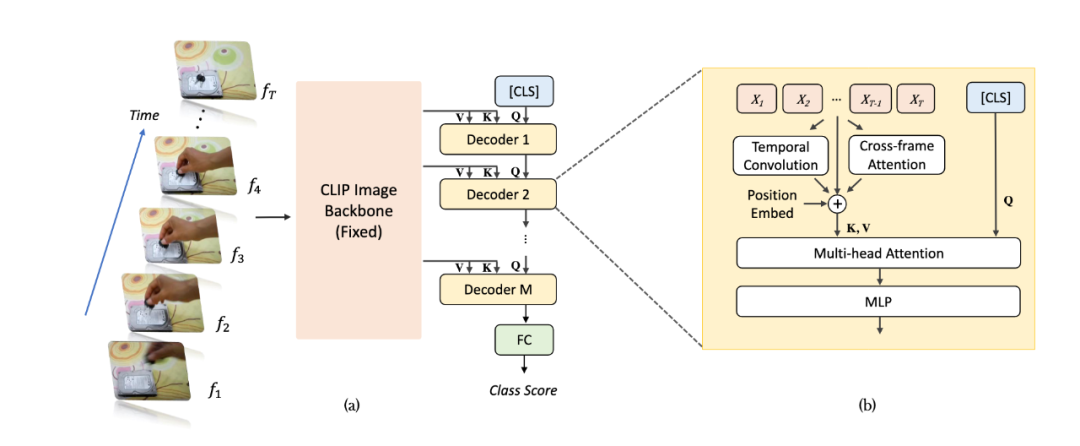
Frozen CLIP Models are Efficient Video Learners -
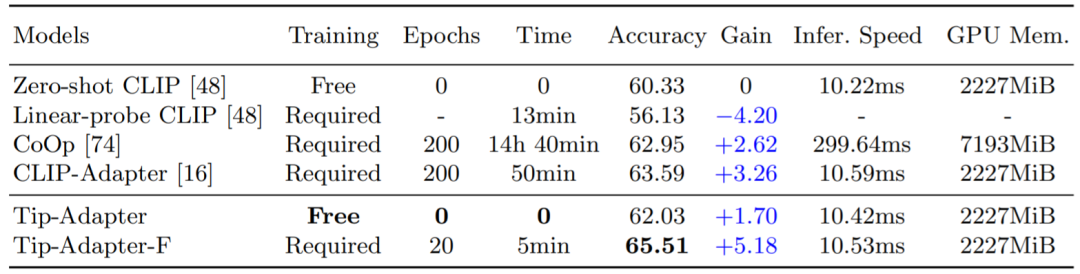
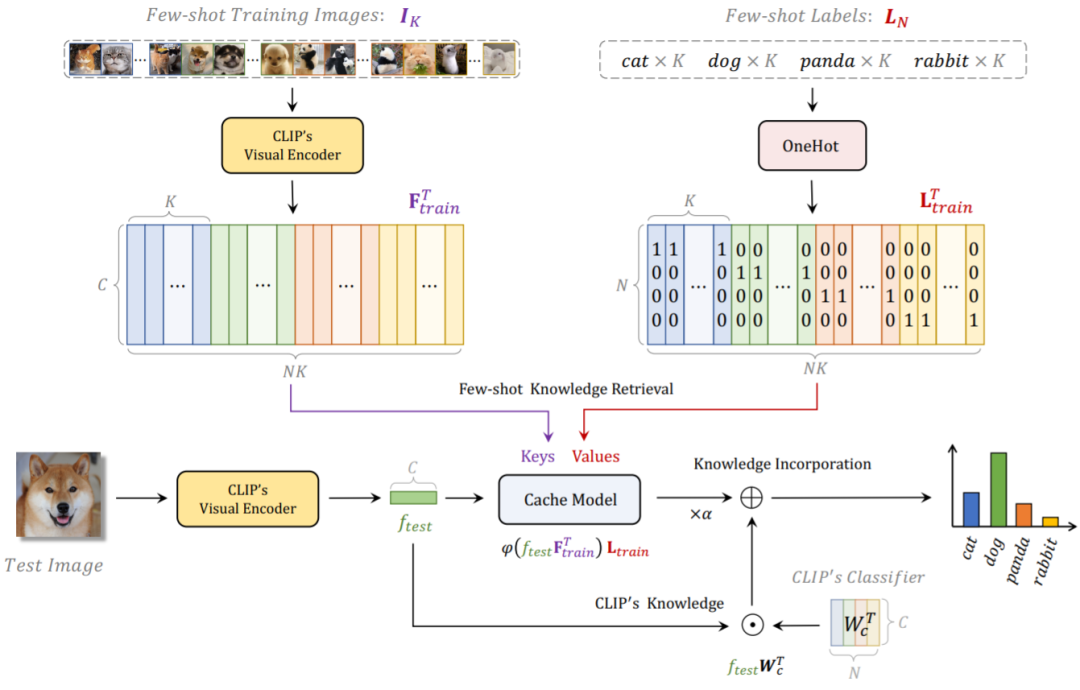
Tip-Adapter: Training-free Adaption of CLIP for Few-shot Classification -
SOFT DIFFUSION SCORE MATCHING FOR GENERAL CORRUPTIONS -
ArXiv Weekly Radiostation:NLP、CV、ML 更多精选论文(附音频)
-
作者:Ketao Zhang、Pisak Chermprayong 等 -
论文地址:https://www.nature.com/articles/s41586-022-04988-4


-
作者:Luhan Ye、Xin Li -
论文地址:https://www.nature.com/articles/s41586-021-03486-3
-
作者:李永泽、邢志广、赵建文 -
论文地址:https://onlinelibrary.wiley.com/doi/full/10.1002/advs.202203305
-
作者:Daniel Bolya 、 Cheng-Yang Fu 等 -
论文地址:https://arxiv.org/pdf/2209.07484.pdf
-
作者:Ziyi Lin、Shijie Geng 等 -
论文地址:https://arxiv.org/abs/2208.03550
-
作者:Renrui Zhang 、 Wei Zhang 等 -
论文地址:https://arxiv.org/pdf/2207.09519.pdf
-
作者:Giannis Daras 、 Mauricio Delbracio 等 -
论文地址:https://arxiv.org/pdf/2209.05442.pdf
本周 10 篇 CV 精选论文是:
登录查看更多
相关内容

Arxiv
0+阅读 · 2022年11月23日
Arxiv
0+阅读 · 2022年11月23日
Arxiv
0+阅读 · 2022年11月22日
Arxiv
0+阅读 · 2022年11月22日


相关VIP内容
相关资讯