在过去十年左右的时间里,人们已经看到了各种各样的跳跃机器人。除了极少数的产品之外,这些机器人都是借助生物学来启发自身的设计和功能。
这是有道理的,因为自然界充满了各种神奇的跳跃类动物,将它们的能力与机器人相匹配似乎是一个合理的追求。以蚂蚁、青蛙、鸟类和婴猴为例,机器人已经尝试过模仿了这些动物的动作,且偶尔以某些特定方式模仿成功了。
对于来自加州大学圣巴巴拉分校和迪士尼研究中心的机器人研究者来说,这引出了一个简单的问题:如果你要制造一个专注于跳得尽可能高的机器人,它到底能跳多高?
在最近发表在《自然》杂志上的一篇论文中,他们用一个可以跳到 33 米高的机器人回答了这个问题,这个机器人可以跳到自由女神像上的眼睛水平线的高度。
![]()
论文链接:https://www.nature.com/articles/s41586-022-04606-3
如下视频里的表现,它并不完美,但仍然称得上是不错的跳跃机器人,包括自行起跳、着陆、自动复原,然后再次起跳。
![]()
这款跳跃机器人
大概 30 厘米高,重约 30 克
,对于这类机器人来说还是比较重的。它几乎完全由充当弹簧的碳纤维弓和蓄力的橡皮筋制成。机器人的中心包括一个电机、电池和一个连接机器人顶部与底部的绳索的闩锁装置。
为了准备起跳,机器人开始旋转它的马达,在 2 分钟的过程中,它会将绳索卷起来,将机器人压扁并逐渐蓄力。一旦绳索完全上紧,电机的另一次拉力会使闩锁装置跳闸,从而松开绳索并在大约 9 毫秒内释放所有力,在此期间,机器人从 0 加速到 28 m/s。总而言之,该机器人的比能量超过每公斤 1000 焦耳,这足以推动它比最好的跳跃生物高出一个数量级,并且可以轻松地将现有任何其他跳跃机器人的高度提高三倍。
![]()
之所以能够跳得这么高,是因为这款机器人依赖于一种在生物学中找不到的工程技术:旋转马达。
使用旋转电机和一些连接到弹簧的齿轮,可以在相对较长的时间内使用相对较少的功率来存储电机旋转时的大量能量。动物无法使用旋转马达,即使它们可以将肌腱作为「弹簧」,但这种弹簧可以为跳跃供能的能力是受限的,取决于肌肉单次发力的冲程。生物跳跃之中表现最好的是婴猴,相对于它们的体重来说,它们拥有最发达的跳跃肌肉,但是仍然会限制动物能够跳多高。
此前,许多机器人已经将旋转电机和弹簧结合起来进行跳跃,但本文研究者认为,设计跳跃机器人的最佳方法是颠覆生物学:与其通过更大的马达获得更高的跳跃幅度,不如在使用尽可能多的技巧的同时尽量用小功率马达。
以往研究人员模拟了生物跳跃的肌肉与肌腱的比例,并发现最佳性能来自肌腱质量约 30 倍的肌肉。但是对于工程跳跃,这篇论文表明这个质量比是可以反转的,比如该跳跃机器人的弹簧是电机质量的 1.2 倍。
「我们太依赖动物模型了,」论文作者之一 Morgan Pope 表示,「所以我们一直在跳几米高,而我们其实可以跳几十米高。」
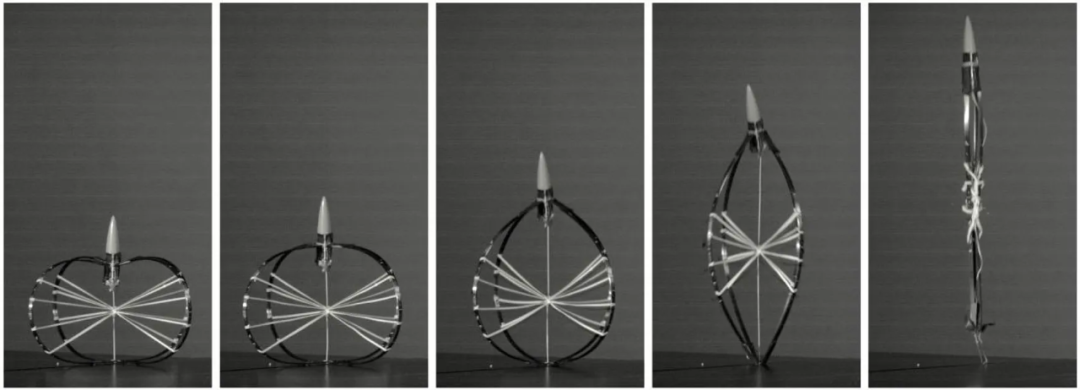
![]()
一系列高速图像展示机器人释放了弹簧中的张力并跳跃。
「第一次看到我们的机器人跳起来,有一种神奇的观感,」加州大学圣巴巴拉分校的论文第一作者 Elliot Hawkes 说道。我们从一个更像弹簧棒的设计开始,然后是弓形设计,然后是混合弹簧设计,将橡皮筋和弓形结合在一起。我们花费了无数时间用于解决各种具有挑战性的机械问题,从齿轮箱齿剪切到铰链断裂,再到碳纤维弹簧爆炸。每一次新的迭代都同样令人兴奋——最近一次跳跃超过 30 米,当你亲眼看到它起飞时,它会让你大吃一惊。这么小的设备里藏着如此大的能量!」
自由女神像的眼睛高度显然仍不是极限,想让机器人跳得更高可能需要使用一个更有弹性的弹簧,来最大化机器人存储的能量,同时不增加其质量。「我们使用混合拉压弹簧将能量存储推到了更高水平,」Hawkes 表示。「但我相信弹簧设计可能会进一步推动这一点。我们现在的能量约为每公斤 2000 焦耳。
看到这个机器人近乎疯狂的跳跃高度,我们很难不去想象为什么不多看看自然界的其他生物,设计出更多仿生机器,但在这里需要关注的问题是,仿生机器人并不是生物机体。「我们制造了一种非常专业的设备,它可以很好地完成一件事,」Hawkes 说。「它偶尔会跳得很高。生物跳跃在许多其他方面做得更好,而且更鲁棒。」
不过,即使是当前版本的跳跃机器人也确实可以自我纠正、重复跳跃并携带像相机一样的小型有效载荷。
研究人员认为,这种机动性和效率的结合可能使其成为探索外星球的理想选择,在那里跳跃的活动形式能让你走得更远。例如,在月球上,由于重力较低且没有大气阻力,这个机器人每次跳跃可以跑半公里。
「我们目前展望最多的应用是太空探索,」Hawkes 表示。「月球是一个真正理想的跳跃地点,它为探索开辟了新的可能性,因为它可以克服具有挑战性的地形。例如,机器人可以跳到难以接近的悬崖边或陨石坑底部采集样本,然后返回轮式漫游车。」他和他的团队目前正在与 NASA 合作开发这个系统,目标是在未来五年内发射到月球。
https://spectrum.ieee.org/record-breaking-jumping-robot
https://www.nature.com/articles/s41586-022-04606-3
![]()
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com