思岚CEO陈士凯:我们是如何解决机器人自主定位导航的那些坑
雷锋网「新智造」按:近日,思岚CEO陈士凯在机器人创新生态连接大会上介绍思岚科技产品在机器人移动当中遇到的问题,以及他们如何用技术来解决这些问题,从而在合适的时间,以合适的成本提供合适的产品。本文由公众号《机器人创新生态》整理,雷锋网授权转载。
机器人生态需要行业各个环节一起帮助,才能进行茁壮的成长。思岚科技是一家定位于提供机器人的小脑和眼睛的公司,只是我们在整个机器人生态当中是处于核心的解决方案地位。今天,和大家介绍一下这么多年以来我们的导航定位技术在实际机器人当中遇到的挑战,还有我们思岚是如何解决的。今天主要的侧重点是在它的可移动部分,这其实也就是顺应了议程的““万物有灵”,这个灵在思岚看来是它的可移动性。
自主定位导航技术成机器人产品的焦点
高交会上可以看到很多智能机器人的产品,现在我们发现市面上智能搬运机器人、扫地机器人、商用机器人这几品类比较成功,也相信将会有蓬勃发展的市场。
目前我们把机器人分成两大方向。第一个是专用领域。这类机器人的特点是重点解决某一种功能,它的使用范围相对狭窄,但它的应用场景和适用性更好,比如说智能搬运、仓储、巡逻;另外一种是通用领域,更多是使用在家庭、办公室等场景。这类机器人的特点是它适应的场景比较多,成本上要更加符合消费市场。从产品形态看我们把它分为两种:面向家庭和面向轻商用的。
通用领域,比如扫地机器人这种品类,一方面是消费品,成本比较敏感;另外它所面向的环境比较简单;很重要的一点,这类机器人可以允许一定的差错。相对应专业领域的机器人,如智能仓储机器人,则更加看重可靠性,对于成本的需求相对来说不是那么高,但环境对于这些机器人来说是更为复杂。
如果把做机器人的目的和产品形态定义成四个维度,这四个维度焦点就是怎么样能够实现自主定位导航。我们说到的这几种比较成功的机器人品类,在使用环节当中,自主定位导航占到非常重要的地位。当然有很多其他的技术,比如说语音识别、语义识别和图像识别也是非常重要的,思岚更加关注的则是智能导航,这也是思岚重点为这个领域拓展的方向。
激光还是SLAM不重要 工程化产品才是关键
思岚科技,致力于提供自主定位导航解决方案。到现在为止也提供低成本的激光雷达,当然是更侧重在服务机器人行业,以及配套的定位导航系统。以这两个为核心,有两个应用点,一个解决方案针对的是各种各样的机器人;另外一个是针对相对完整的通用型平台。就像商用机器人要解决的问题,陌生环境下机器人怎么样绘制地图信息,怎么样绘制位置信息,这也是重要的自主定位导航,或者SLAM技术解决问题。
这个问题现在有很多方案,比如说行业中会经常看到到底谁占优,比如说未来是激光雷达还是SLAM。思岚长久以来是以激光雷达为主,它的方式比较成熟,这是基于思岚方案实时地图绘制的效果。
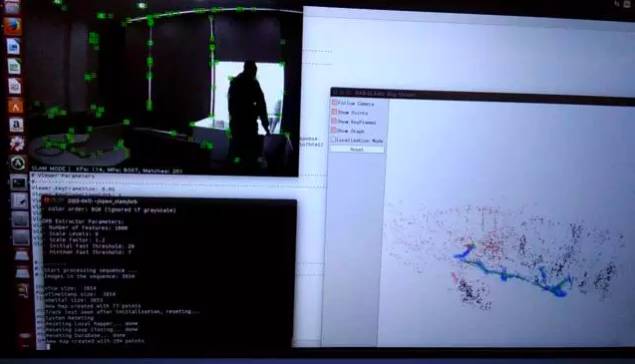
激光方案比较直接,把地图绘制出来以后,机器人就会了解平面图,这个地图跟我们人类理解是一样的。SLAM在这两年发展也比较迅猛,这是单路的SLAM方案,用摄像头也可以进行环境的了解,这种方案目前还在研发当中,但它未来的潜力是非常大的。
对于一家公司来说,考虑的不是在激光或SLAM我选择哪一种,更多考虑的是工程化问题,这里面很重要的是“80/20原则”,20%是研究核心理论,思岚是做80%,怎么样把技术方案落地,比如成本和可靠性问题。所以对于思岚来说激光还是vSLAM,这并不重要,重要的是合适的时间,以合适的成本提供合适的产品。
在这里介绍一下我们产品落地的时候遇到的实际情况,以及我们怎么解决。
挑战一:建图效果和用户心理预期差距SLAM进行精细化建图
SLAM方案,它可以建立地图,可以让机器人自主定位。但是会有这样的问题,它建立的地图和人的预期是有差距的。怎么理解呢?比如人认为地图是怎么样的,就是画面中这样。这是我们人所认识的房屋的平面设计图,我们买到一个机器人它能绘制地图,它画的平面图,就应该长成我们认为的这样。
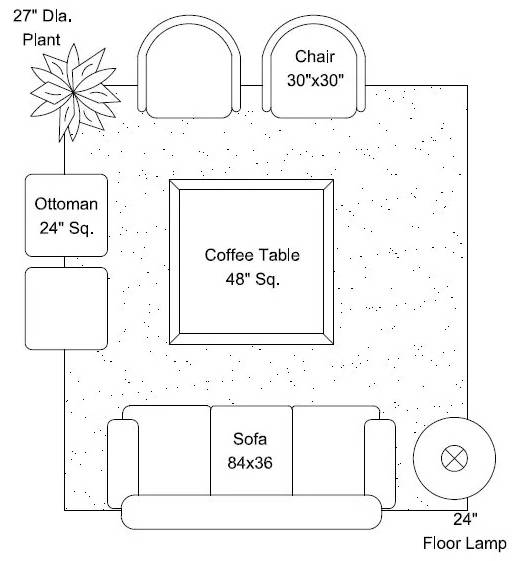
用户理想的地图(适合展示的地图)

激光的SLAM方案,画出来的地图
那这个地图如果展现给用户,尤其是普通的“小白”用户,他们会有点失落,觉得好像这东西并不怎么样。所以第一个问题,我们要有进行精细化建图的方案。
什么叫精细化建图呢?就是机器人画出来的地图是符合我们预期的,这正是现在思岚做的东西。画面左边是精细化地图的效果,同样是SLAM的简图,思岚绘制的地图在实际直接工作的时候就可以绘制出跟人所期待的地图那样,是非常完美的,这个地图可以直接用于展示,不需要二次的修正。因为这个不单是后期的处理,在导航内部,在实际建图的时候就实施了精细化构建,这是我们解决的问题。
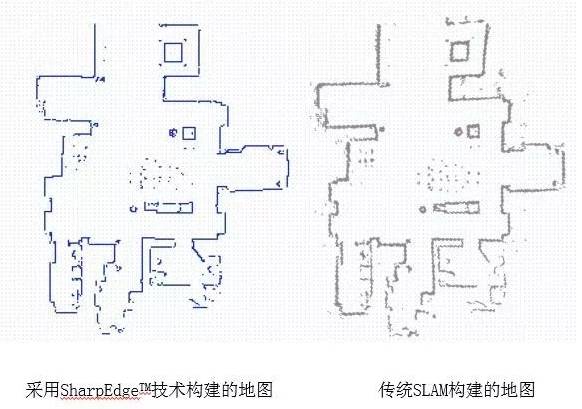
这是一个实际案例中300平方米的家庭地图,这个地图没有做任何的PS,直接从机器人中拿出来,可以看到墙壁的边缘非常规整,没有任何的噪点。这样的地图简单进行修饰,就可以放在手机APP上,这就是符合用户预期的东西。
挑战二:环境完全变化后的可靠定位
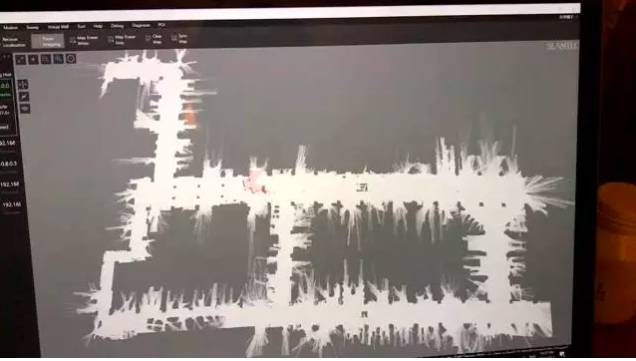
第二个问题是重定位的问题。重定位有两个问题,第一个是人启动的时候重定位,还有一种重定位是环境变化非常多的时候可靠定位。这里有个例子,这个是在今年初展会上的情况,环境中有非常多的人,同时我们要求机器人在里面跑,这个例子并不过分,因为做服务机器人的,当然希望机器人在这种场景下能很好的进行工作。但是你可以看到右边的图,激光雷达探索到这个环境,做了非常大的变化。
按道理来说,这时候非常容易出现的一个问题,就是定位的偏移。但是看到这个机器人在这里面可以长时间工作,机器人在这种场景下连续被他们折磨了两天,每天16个小时,基本上都不会出问题。这里面涉及到的就是在环境多变情况下的考验。
有些客户也比较苛刻,在机器人工作的时候,把它完全围住了,让它24小时、48小时连续不停的运作,并且要求不能偏,来测试机器人。这听上去非常不科学,但是客户说没办法,我们在实际场景中就有这样的环境,你必须得解决。所以在这里面我们也动了一些脑筋,我们是部分解决这样的问题。
怎么样解决呢?就是我们前面说的,单靠某一种传感器它其实并不能解决所有的问题,我把激光的数据遮挡了,这种情况下激光不能解决所有问题,但是我还有传感器,所以就用传感器和建立概率模型解决问题。这样的话,也解决了一个实际的案例,这个对于做广大服务机器人各位来说是很好的。
挑战三:全局重定位
全局重定位,突然让机器人根据场景开机,这个问题行业中有几个解决方案,第一个是使用UWB,它可以重定位。但是这个技术有一个缺点,必须对环境进行布置,比如把它放在一个场景,需要先在商场上很多地方预埋信标,这在成本和部署上有一定的挑战。还有一种是完全自主重定位,思岚在这里做的是后者,完全自主重定位,当然UWB也是可以支持的。
这个案例中展示的是机器人在1万多平方米的环境中进行人启动的效果,最终机器人在这个环境当中进行一些简单的判断,它就可以找到真实的环境。在这里面它面向的难点是什么呢?你可以看到这样一张地图,其中有非常多的相似性,那怎么样防止在定位的时候定位错误的地方,这个是有挑战的。
SLAM≠自主定位导航,不解决行动问题
思岚到现在其实才解决了机器人移动冰山一角的问题,为什么这样说呢?在行业中SLAM这一概念也是这一两年被行业和媒体所熟知的,大家认为机器人解决了SLAM就大功告成了,实际上SLAM和自主导航定位并挂不上号的,其实SLAM不是解决行动的问题,但是对于行业来说更重要是机器人怎么样进行行动的。
行动是另外一个故事了,或者无人驾驶更加关注行动的问题,对于汽车来说有很多公司可以提供地图、GPS和定位,对于他们来说怎样让汽车进行行动就是它的难点。对于机器人来说也是这样,光有SLAM的地图和定位还是不够的,这里面就是导航这部分提供的内容。所谓导航是分两块,第一块是路径规划,就像GPS导航规划一条路径,这个听上去比较简单;另外一块是有了规划路径,我怎么样控制机器人去跑,这个叫做运动控制。
对于一些特殊行业,如扫地机器人行业,做好的导航算法是非常难的,目前学术界没有好的解决方案。另外还有一些很细琐的东西,机器人没电了怎么充电,这个事情看上去很简单,但是你真的要机器人自己去做这个事,你会发现里面有很多坑要解决。
这里我们提炼了行业中不同的案例。
挑战四:可靠的障碍物规避
第一个案例是可靠的障碍物规避,比如在这个场景中机器人在跑,这个机器人是三维的,要解决合理的避障,上激光雷达的话成本都是三四十万。那对于机器人行业怎么解决这个问题呢?比如现实场景中,这是我们客户在“虐待”机器人,故意跟它过不去,挡了它的道,挡好以后把小推车推到一边。他们有更加恶劣的测试,这里面我只放其中相对比较轻的一个。目前我们的机器人通过激光雷达、超声波一些方案来进行避障,但是怎么样在实际场景中有可靠的应用。

还有是玻璃的问题,无论是激光和视觉都没法看到玻璃,但是超声波可以,但是怎么样让机器人可靠的进行运动。目前思岚的导航系统不仅仅是激光雷达,还支持视觉,像超声波、毫米波雷达,物理碰撞,这是我们解决方案都会支持的传感器技术。
还有一个问题是理解环境中的逻辑概念。这个是什么意思呢?这个是机场场景,行人扶梯,电梯在维护,不希望人进去。人看到就知道这边不能走,如果是机器人长得比较矮小,他通过激光导航发现这个扶梯可以走,这个时候就犯大错误。那这个问题我们在现实当中怎么解决呢?我们就给它增加虚拟墙和虚拟轨道。
除此以外,还有一些实际的场景,比如说多涂层和POI。刚才说了地图的构建,思岚是精细化构图,但是地图上没有我们人感兴趣的东西,比如商场的平面图,地图上标识的是每家店铺的名称,它肯定不是平面图。所以在软件上我们会做很多的修改,比如在地图上我们允许加一些兴趣点,POI的信息,另外我们也支持多涂层叠加。
挑战五:多楼层适配
还有递送机器人,多楼层的送递,场景的自动切换,对电梯的系统怎么样进行改造,另外让机器人怎么能感知到是某一个具体的楼层,这些都是目前导航定位系统中会遇到的问题。这个是行业的整合,不单是把导航定位系统做好,还要针对电梯的通讯协议,不同楼层之间感应到楼层的切换。这些细节上来说,还要考虑用户心理的问题,因为有时候电梯非常多的人,机器人进去该怎么办?我们现在也针对这些出了解决方案。
挑战六:功耗、体积、成本
最后一个问题其实也是我们思岚最早解决的,就是功耗、体积、成本的问题。大家都知道我们思岚最早是做激光雷达的,目前我们的A2激光雷达最新性能,给大家通报一下,我们目前A2实现的是16米半径的测距,并且测量平距是行业内4K,今年是8K,并且在体积外观尺寸上不会有任何变化。
在功耗和体积上,我们都知道导航定位系统很多时候是需要很强的运算性能的,要搞一个PC处理器才能搞。那这里的一个问题,对于机器人来说,商用机器人其实问题不大,一个处理器几百瓦的功耗都能受得了,有些处理器功耗小一点就是十几二十瓦。但是做一个扫地机,或者家用机器人功耗就受不了了,运算性能增加成本也会贵一些。思岚目前在行业内相对比较另类的做法,我们是做软硬件深度整合,它是做到2瓦。
这个是基于带有激光雷达和导航定位系统的完整机器人,这个机器人它有个核心特点,它是使用干电池就可以工作,可以实现2小时的连续工作,这足以可以看到它的低功耗特性。
未来的展望:提取语义信息
思岚现在做的是语音信息的提取,现在我们采用多传感器融合,所以可以通过视觉方式来做自动的标注,可以帮助多涂层和POI做智能感知。
另外是行业中的情况,比如基于深度学习的路径规划。在这一两年我们看到很多很多巨头在做神经网络,尤其英特尔在芯片这一块的性能是非常给力的,在功耗和性能上都让我们非常吃惊,我相信在不远的将来,我们导航定位这个领域也会非常广泛使用深度学习,包括SLAM,以及像路径规划这方面的应用。
关于新智造
「新智造」是「雷锋网」旗下垂直公众号之一,我们致力于发掘机器人、无人机、智能物流、新零售等领域的创新创造。无论你是大公司、创业者、亦或VCer,都可以在这里看到关于智能制造领域不同角度的报道。
新闻爆料、合作报道可以进入公众号留言。
● ● ●
近日热门文章
GoPro CEO中国行:不再「不了解中国」,Karma还会有下一代





