【泡泡一分钟】Barcode: 一种用于快速视觉推理的全局二进制模板(3dv-46)
每天一分钟,带你读遍机器人顶级会议文章
标题:Barcode: Global Binary Patterns for Fast Visual Inference
作者:Teng-Yok Lee, Sonali Patil, Srikumar Ramalingam, Yuichi Taguchi, and Bedrich Benes
来源:3dv 2017 ( International Conference on 3D Vision)
播音员:糯米
编译:林旭滨 周平
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

我们提出了Barcode这种全局二进制描述子来对车载相机捕捉到的图片进行描述,这种方法可在定位以及转向分类这两个场景中得到应用。Barcode通过将垂直行的分布编码成二进制描述子来刻画图片,即对于图片中每一垂直行,如果其存在对应位则设置为1,否则设置为0。
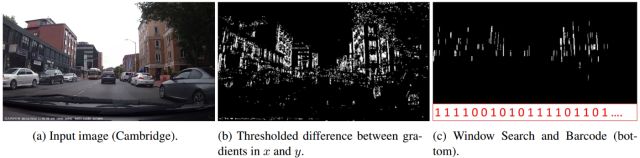
图1 (a)是输入图片,随后对图片进行二值化(b),对二值化图片沿垂直方向搜索,形成条形码(c)
对于定位,我们的方法利用一个图片数据集,数据集中每一张图片都在预处理阶段都提前计算出了其对应的Barcode。在运行阶段,我们首先对每张图片生成这种二进制描述子,然后通过Hamming距离寻找其数据集中的位置。
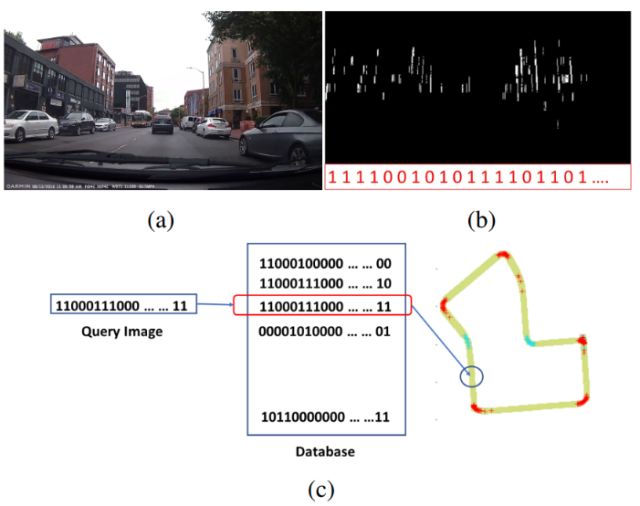
图2. 每副图像(a)都用Barcode进行描述(b),并在已有数据集中寻找最接近的编码完成定位(c)
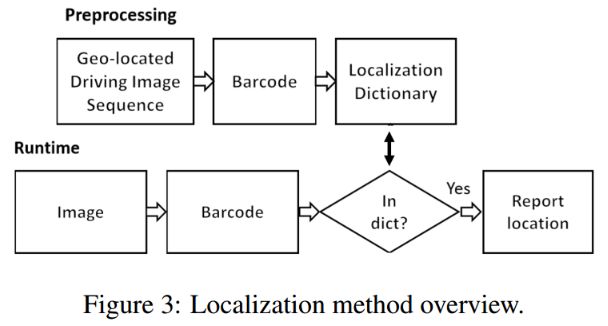
图3. 定位算法流程
对于转向分类,我们用了一系列连续图片的Barcode训练出了一个深度神经网络,它能实现分类转向(向左,向右,向前,静止)。
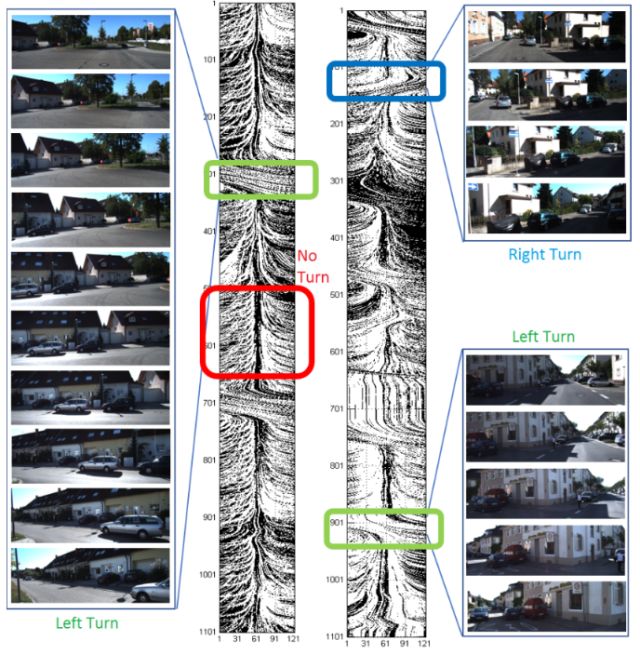
图4. 中间部分是将所有图片序列的条形码编码叠加形成,此图在一定程度上表明了运动特性,以此作为训练集训练网络实现转向分类
关于计算性能,Barcode提取频率可达100-1000Hz,定位频率可达10kHz,转向分类可达1kHz。我们的方法在KITTI数据集以及Harvard和Purdue校园获取的图片序列上获得了令人信服的实验结果。
Abstract
We present Barcode, a global binary descriptor for images captured from a vehicle-mounted camera with two applications: localization and turn classification. Barcode characterizes an image by encoding the distribution of vertical lines into a binary descriptor: in each vertical stripe of an image, if any vertical line exists the corresponding bit is set to 1, otherwise 0. For localization, our approach uses a database of geolocated images, each having its Barcode precomputed during a preprocessing stage. In the run time, we first generate the binary descriptor for each image and then use the descriptor to find the location in the database via Hamming distance metric. For turn classification, we train a deep neural network that uses a set of Barcodes from consecutive images to classify turns (left, right, straight, and stationary). We show that Barcode extraction can be done at 100-1000 Hz, localization at 10 kHz, and turn classification at 1 kHz. We show compelling experimental results on KITTI dataset and other sequences captured near Harvard and Purdue campuses.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
在【泡泡机器人SLAM】公众号(paopaorobot_slam)中回复关键字“3dv-46”,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



