本文描述了一个自主制导和飞行控制系统,该系统在一架部分授权的黑鹰直升机上进行了整合和飞行测试。这项工作是退化视觉环境缓解计划的一部分,该计划的目标是为美国陆军旋翼机的操作提供全天候的能力。制导和飞控系统软件以前曾在一架完全授权的直升机上进行过飞行测试,在这项工作中,被调整为在一架部分授权的直升机上飞行。该系统的主要自主组件包括风险最小化障碍物场导航算法、安全着陆区确定算法和综合提示环境。这些组件提供了反应性规避指导、着陆点选择和飞行员对退化视觉环境的情况了解。为了测试该系统,一个LADAR被用作替代设备,以代替同时为该计划开发的全深L传感器系统。自主的部分授权飞行控制系统提供了一个完全稳定的路径跟踪能力,它由一系列的航点或飞行路径矢量指令指导。本文描述了该控制系统,其性能,以及如何使其适应目前美国陆军舰队直升机的典型的部分授权系统。还介绍了自主软件和人机界面组件。介绍了完全集成的系统在地形中导航、选择降落点和自主降落的飞行测试结果。提出了将部分授权结果与以前收集的完全授权结果进行比较的分析。
任务自适应自主(MAA)部分授权系统
图2中的任务自适应自主性(MAA)系统由三个主要部分组成:任务软件、自主部分授权的FCS(APAFCS)和飞机硬件。任务软件提供控制法的指导,而APAFCS提供稳定性和控制,以遵循命令的路径。飞机硬件是飞行员的操纵杆输入,调整和SAS伺服,飞机传感器,LADAR传感器,以及飞行员显示器。俯仰、滚转和偏航方面的固有机械控制和驱动保持不变,因此该飞机是标准的UH-60L,具有美国陆军机队典型的部分授权飞行控制系统。然而,在垂直轴上增加了额外的驱动装置,这些都是机队可用的部件。本文的后续章节将讨论MAA系统的每个部分。
任务软件包括任务管理器/操作员界面、路径生成、矢量指令、障碍物场导航(OFN)、安全着陆区确定(SLAD)、MAA地图/控制以及综合提示环境(ICE)。
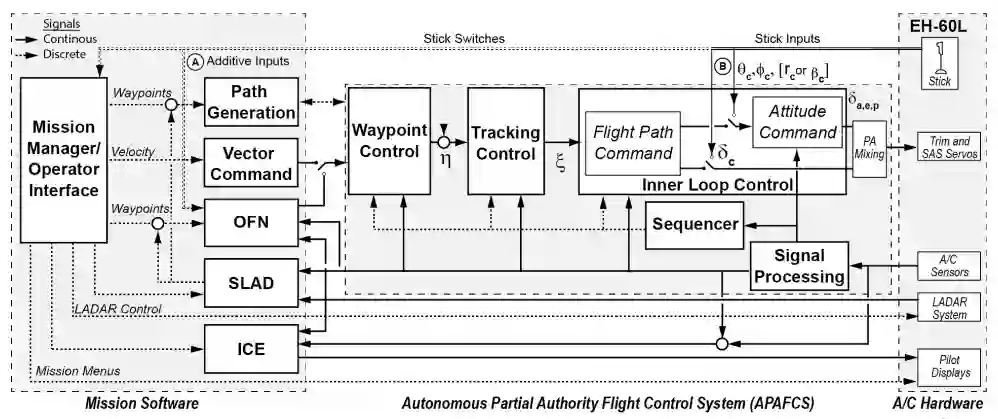
图2:任务自适应自主(MAA)系统由任务软件、自主部分授权飞行控制系统和改装后的UH-60L飞机的硬件组成。
A. 任务管理器/操作员界面
MAA的一项关键技术是飞行员能够以不同程度的自主性进行操作。图2中的任务管理器/操作者界面代表了所有允许飞行员在执行层面进行互动和监控系统的软件。例如,任务管理器允许飞行员或系统操作员通过从地图显示中选择一个目标点来控制任务方案。当这样做时,任务管理器查找目的地信息并命令OFN算法,这反过来又引导自主FCS到达最终目的地。
B. 路径生成和矢量指令
当OFN到达最终目的地附近时需要精确放置飞行器时,路径生成算法被任务管理器/操作者界面以及SLAD算法所使用。路径生成和矢量指令都是开环的、非反应性的引导方法,用于移动飞行器,在系统的集成测试过程中非常有用,因为飞行路径已知是没有障碍的。
路径生成器允许用户通过输入一些航点以及宏观层面的参数,如最大速度、爬升率和加速度限制,来指定一个预定的路径。当路径生成器接受原始航点列表时,它将生成一个扩展的、平滑的航点列表,并将其与相关的速度曲线一起发送给航点控制,从而启动飞行轨迹。
矢量指令过程是指导飞机运动的另一种指导方法。矢量指令过程接收对所需指令速度的离散变化。例如,用户可以输入一个速度、滑行坡和航向率的变化,矢量指令产生一个速度、航向和倾斜率形式的连续指令流,发送到APAFCS的航点控制块。矢量命令使用与接下来描述的OFN算法相同的接口到航点控制块。
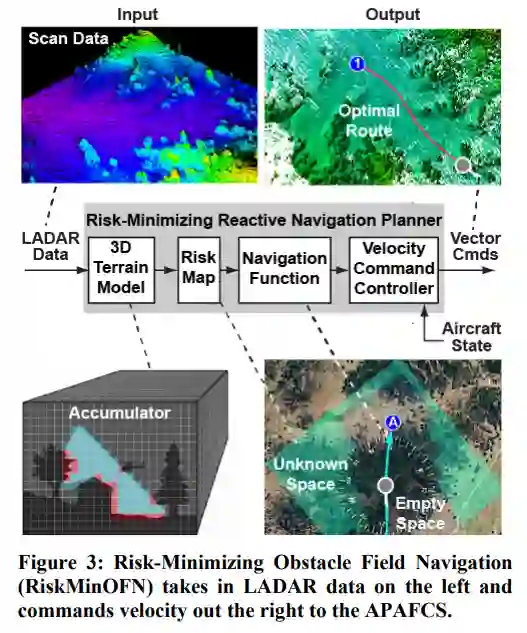
C. 风险最小化障碍物场导航 (RiskMinOFN)
RiskMinOFN算法建立了一个空间变化的风险因素的3维地图,并找到一条通往目标的最小风险的路径。该规划器的主要组成部分如图3所示,它们由地形模型、风险地图、导航功能和速度指令控制器组成。
飞行员或自主系统操作员可以在引导飞机的同时修改RiskMinOFN算法的操作参数。威胁地点和受限空域也可以动态更新。有四个参数文件可供飞行员访问,分别代表OFN模式、巡航、地形、TerrainPlus和进场。新的目的地点可以在任何时候被发送到算法中,允许飞行员通过任务管理器界面改变任务目的地。除了飞往一个特定的目的地点,RiskMinOFN还可以飞行一个一般的目的地航向,它试图保持该航向,同时仍然寻求与OFN模式相关的理想AGL高度,并同时避开危险物。RiskMinOFN算法可以在任何时候被命令取消并进入悬停状态。速度限制也可以调整,允许更慢或更高的速度。飞行员还可以对航向和地面跟踪的积极性进行调整。该算法仍然把避免碰撞作为最高优先级,所以这些飞行员的输入只影响长期的飞行路径,不会造成与地形的任何碰撞。
D. 安全着陆区确定 (SLAD)
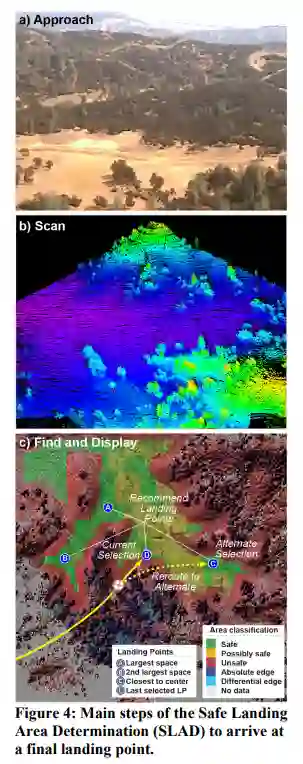
SLAD算法扫描一个着陆区(LZ),根据表面坡度、粗糙度和与障碍物的接近程度找到合适的着陆点[14]。该算法从点头的LADAR中获取线扫描数据,并通过收集高度图中每个网格单元的统计数据来创建一个高度图。相邻单元的高度变化被分为绝对变化和差异变化。绝对高度变化是基于两个相邻单元的平均高度之间的差异。差异变化是基于设备的扫描线上的高度变化,这允许感应高度的微小变化。此外,该算法在这些网格单元上使用滑动窗口来确定着陆区的表面粗糙度、坡度和其他窗口统计数据。
用于寻找解决方案和呈现结果的步骤如图4所示,一架飞机接近图4a所示的潜在着陆区。当点头线扫描LADAR进入范围时,该区域被扫描,点云数据被算法收集(图4b)。当高度图中积累了足够多的点阵扫描通道时,就可以通过使用滑动窗口统计和其他指标找到一个解决方案。然后,该解决方案被显示为带有蓝色字母编码标记的彩色编码叠加图(图4c)。蓝色字母编码的标记是解决方案推荐的着陆点A、B、C和L。解决方案的彩色编码着陆掩码有绿色区域,代表安全着陆点,其周围的窗口区域符合坡度、粗糙度和数据空缺的要求,并且没有任何绝对或差异边缘的高度变化。黄色区域代表可能的安全着陆点,其窗口区域符合所有的安全着陆要求,但有超过特定阈值的边缘高度差变化。边缘高度变化用青色标记,通常是由小石块、未割的草和灌木丛等物体引起的,这些物体可能是危险的,也可能不是,但还是要按照算法的建议避开。深蓝色的绝对边缘高度变化通常与大型固体物体有关,如树木或大型结构,必须加以避免。红色区域是不安全的着陆点,未能达到安全标准。
E. MAA/ICE飞行显示器和接口
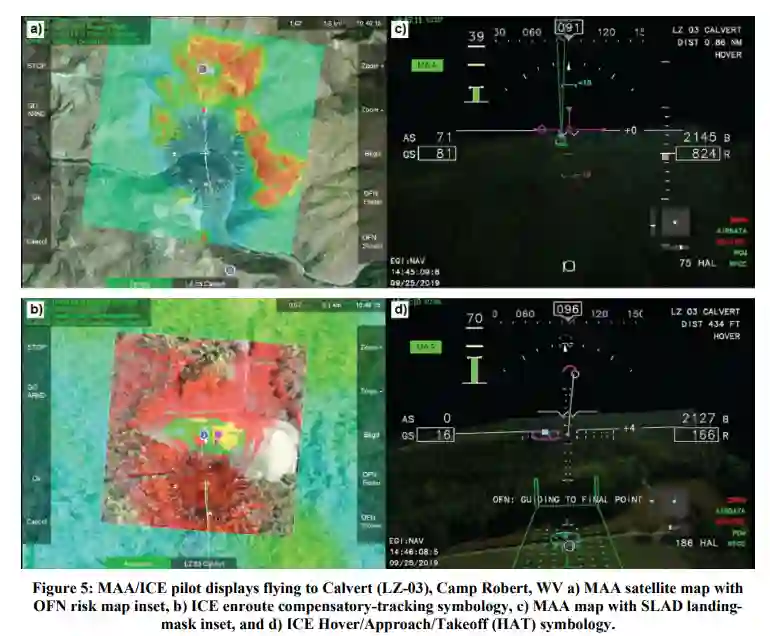
无论是在测试中还是在部署的系统中,飞行员或操作员的态势感知对安全的自主操作至关重要。对于这个系统,使用了两个显示器,即MAA OFN/SLAD地图和ICE显示器,它们都显示在图5中。这些显示为飞行员在DVE中飞行任务提供足够的态势感知。
MAA OFN/SLAD地图(图5a)显示了一个顶视图,可以显示卫星、地形或剖面信息。在地图中嵌入了当前飞机高度的RiskMinOFN风险量的彩色编码片,风险范围从低(浅蓝色)到高(红色)。所需路径的指示显示为飞机前方的面包屑图案。OFN的预期目的地显示为一个洋红色的点,预期的目的地航向显示为罗盘玫瑰上的洋红色箭头。当接近目的地时,SLAD着陆掩码与推荐着陆点一起嵌入OFN风险地图(图5b)。如前所述,SLAD的插图显示安全区域为绿色,不安全区域为红色,推荐的着陆点是飞行员可以选择的。
MAA引导的意图也用红色符号显示在ICE显示器上,它有两页(模式)。这包括在途(图5c)页和悬停/接近/起飞(HAT)符号页(图5d)。这两个页面都叠加在由LADAR传感器生成的图像上。白色的符号是飞机的测量状态,而红色的符号代表来自导航的指令值。