

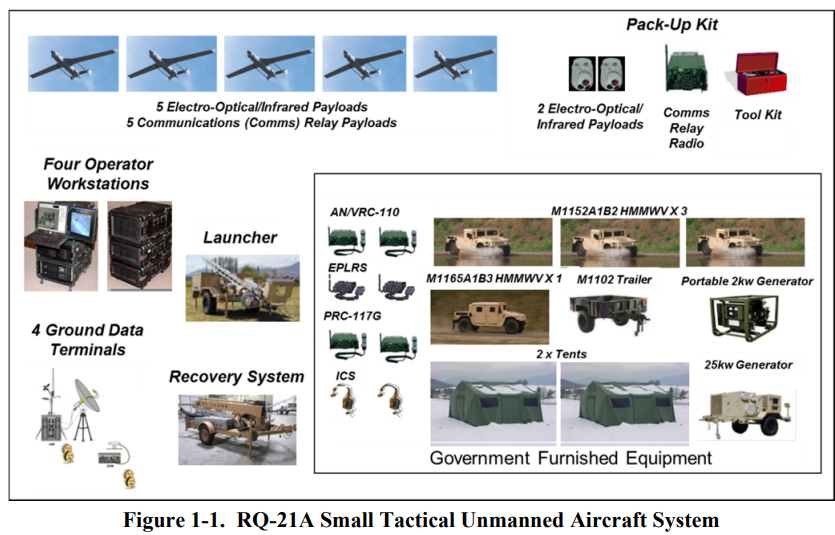
图:RQ-21A Blackjack 小型战术无人机系统
本文件报告了在初始作战测试和评估(IOT&E)期间对 RQ-21A Blackjack 小型战术无人机系统(STUAS)的测试充分性、作战有效性和作战适用性的评估。海军作战测试与评估部队指挥官(COMOPTEVFOR)在海军陆战队作战测试与评估活动(MCOTEA)的协助下,于2014年1月至12月期间进行了RQ-21A IOT&E。海军和海军陆战队计划利用 IOT&E 的结果为各军种的全速生产 (FRP) 决策提供信息,全速生产原计划于 2015 年 10 月进行,现计划于 2016 年 9 月进行。计划在 2016 年 9 月全速生产之前进行更多测试。DOT&E 计划在首次试生产之前提供最新的作战评估,以进一步支持该决定。RQ-21A属于第二类采购计划。
RQ-21A 在作战中并不有效。配备 RQ-21A 的分遣队无法有效支持地面指挥官的任务,因为无人驾驶飞机无法在指定时间到达驻地,也无法在任务期间留在驻地。电子光学/红外传感器可提供准确的目标位置。使用传感器的操作员无法对 1 米目标进行正确分类,而这是通过对步枪、火箭榴弹发射器和铁锹等物品进行分类,对个人的敌对/非敌对意图进行一致分类所必需的。
RQ-21A 不适合作战。RQ-21A 的系统中止间隔平均飞行时间(MFHBASYS)为 15.2 小时,而要求为 50 小时。由于飞行器的可靠性问题,整体系统可用性未达到 80% 的关键性能参数阈值(演示值 = 66.9%)。推进模块的平均使用寿命为 48.9 小时,没有达到制造商规定的 100 小时能力。生产质量控制问题导致系统的可靠性和可用性较差。
网络安全测试表明,该系统存在可被利用的漏洞。机密附录中包含有关网络安全测试的更多细节。
RQ-21A 测试是充分的,并按照 DOT&E 批准的测试计划执行。
系统描述和任务
RQ-21A 系统包括五个飞行器(每个飞行器配备一个电子光学/红外有效载荷和一个通信中继有效载荷)、两个地面控制站(每个地面控制站有两个操作员工作站)、四个地面数据终端、一个发射器、一个回收系统以及政府提供的车辆和支持系统。
海军陆战队指挥官打算利用 RQ-21A 为岸上单元提供有机的战场情报、监视和侦察能力,以减少对上级总部此类资产的依赖。除了从陆地基地开展行动外,海军陆战队无人机中队的分遣队还将在 L 级舰艇上搭载人员和设备,以支持海上行动。
测试的充分性
RQ-21A 的作战测试足以支持对该系统的作战效能和作战适用性进行评估。海军和海军陆战队于 2014 年 1 月至 12 月在三个不同地点分三个阶段进行了测试。测试地点依次为加利福尼亚州海军陆战队空地作战中心(Twentynine Palms)、北卡罗来纳州海军陆战队基地(Camp Lejeune)和美国海军 "安克雷奇 "号驱逐舰(LPD 23)。在所有三个测试地点进行了 38 次飞行,总飞行时间达 233.6 小时。
2014 年 5 月,海军陆战队部署了具备早期作战能力的 RQ-21A 系统,以支持海外作战行动。这支部署的 RQ-21A 分遣队由多达八辆飞行器、两台发射器和两套回收系统组成。从 5 月到 9 月,该系统共飞行约 121 次,飞行时间达 995 小时。每天,分遣队都会发送一份每日摘要,其中包括每个主要设备的状态以及当天飞行活动的叙述性摘要。早期作战能力分遣队在海外部署期间收集的数据为了解系统可靠性提供了更多信息。
上一次在 IOT&E 中重温运行测试结果
为支持RQ-21A里程碑C,海军于2012年9月至11月进行了作战测试B-2(OT-B2),DOT&E根据该测试对已证明的性能进行了评估。测试之后,海军处理了 DOT&E 2013 年 4 月备忘录中包含的七项建议中的四项(更新可靠性增长曲线、验证机身结构完整性、确定并纠正有效载荷重置次数过多的根本原因、量化系统地面组件的功率要求并与海军陆战队标准发电机的发电能力进行比较)。海军没有完全处理该备忘录中的两项建议,这两个问题(加强质量控制流程和通信中继有效载荷频率变化)对 IOT&E 期间的系统性能产生了不利影响。DOT&E 的最后一项建议是在 "能力生产文件 "中提供可靠性原理,但这项建议没有得到落实,而在 IOT&E 期间,该建议本可以为系统可靠性差提供操作上的帮助。
根据 2012 年 OT-B2 期间收集的数据,DOT&E 确定光电/红外有效载荷具有为战术指挥官提供精确目标捕获情报的潜力。在本报告中,DOT&E 确定,虽然电子光学/红外传感器可提供准确的目标位置,但对步枪、铁锹或火箭榴弹发射器等 1 米目标进行正确分类的概率较低,无法对个人的敌意/非敌意进行一致的判断。DOT&E OT-B2 评估与 IOT&E 评估之间的差异可归因于 "能力开发文件 "与 "能力生产文件"(CPD)之间的变化。CPD 中更严格的要求和 IOT&E 的操作环境导致有效载荷性能不佳。
DOT&E 在 OT-B1(2010 年 1 月)期间首次将通信中继有效载荷缺乏飞行中频率更改能力确定为潜在缺陷,并在 DOT&E 2013 年 OT-B2 备忘录中再次强调了这一点。在本报告中,DOT&E 确定通信中继有效载荷限制了指挥官的战术灵活性。
就在 OT-B2 之前,开发测试经历了一次机身故障,导致机身破裂,这可能归因于生产质量控制问题。DOT&E 建议海军在制造缺陷可能导致飞行器损失的领域加强质量控制流程,以尽量减少未来发生事故的可能性。在 IOT&E 期间,生产质量控制问题导致系统的可靠性和可用性较差。
在 OT-B2 期间,该系统的 MFHBASYS 为 10.6 小时,低于 50 飞行小时的阈值要求。在 IOT&E 期间,该系统的 MFHBASYS 为 15.2 小时,继续远低于阈值要求。这导致 DOT&E 认为 RQ-21A 不合适。
运行效率
RQ-21A 没有作战效能。配备 RQ-21A 的分遣队要完成任务,首先要让无人驾驶飞行器在规定时间内抵达理想地点,并与受支援单元建立联系。然后,无人驾驶飞行器应能在规定的驻扎时间内执行指定任务。
进驻后,飞行器传感器应通过提供准确的位置和敌方行动报告来支持指挥官的情报需求。无人驾驶飞机应支持其所配备的其他任务,如通信中继,无人驾驶飞机应具备接受动态重新分配任务的能力,以支持指挥官的紧急需求。任务结束时,应在不造成重大损失的情况下安全回收飞行器。
任务覆盖率指标衡量的是飞行器在执行任务时的驻留时间百分比。该指标显示了地面指挥官可以期待 RQ-21A 提供的支持水平。在 IOT&E 期间,装备 RQ-21A 的单元在执行任务的驻扎时间中提供了 68% 的覆盖(122.7 小时中的 83.8 小时)。实际上,在指挥官期望获得支持的时间中,有三分之一的时间 RQ-21A 没有或无法提供必要的支持。
在 IOT&E 期间,RQ-21A 成功完成实际任务的概率很低。在 45 次尝试飞行中,有 19 次(42%)按时发射,为指定任务提供了支持,并在指定期限内一直驻留。在 45 次尝试发射中,有 35 次(78%)为地面指挥官提供了一定程度的效用(能够发射并提供了一定的驻留时间)。
RQ-21A 传感器不符合国家方案文件中规定的两个目标分类关键性能参数之一。光电传感器需要为 1 米线性目标(武器或工具)提供 50%的正确分类概率,而红外传感器需要为 3 米大小的线性目标(车辆底盘类型)提供 50%的正确分类概率。红外传感器对 3 米物体的分类正确率为 100%,超过了关键性能参数阈值。对于电子光学传感器,基于 IOT&E 数据的回归模型显示,在沙漠环境中正确分类的概率为 41%,在海洋环境中为 43%。
通信中继有效载荷限制了指挥官的战术灵活性和任务完成。通信中继有效载荷被限制在两部无线电中的一个频率上。发射前,维护人员会设置每个无线电的频率。一旦升空,飞行器与通信中继有效载荷之间的唯一接口就是电源连接器。操作员可以打开或关闭通信中继有效载荷的电源,但不能改变频率。这就限制了通信中继有效载荷只能在一对预先设定的频率上支持预先计划的中继任务。在 IOT&E 期间,装备 RQ-21A 的单元有四次无法向地面单位提供支持,原因是通信中继有效载荷设置的频率与地面单位使用的频率不同。当能够建立兼容频率时,有效载荷能够转发清晰、安全的语音通信和所需的安全数据。该有效载荷能够根据需要在相距 50 海里的两个地面站之间进行语音通信中继。
RQ-21A 提供战术上有用的目标位置。虽然国家方案文件没有规定传感器兴趣点精度的临界值,但海军陆战队的指导意见指出,100 米的精度足以支持战术行动。RQ-21A 提供的 90% 圆误差可能目标位置误差为 43.8 米。根据联合出版物 3-09.3 "近距离空中支援(31 至 90 米)"的定义,RQ-21A 的目标位置精度为 IV 类。这样的精度足以支持常规线性战场上的目标瞄准,因为在这种战场上,成功的目标交战所需的目标定位精度较低。但在需要更精确目标位置的密集城市环境中,这种精度无法支持目标定位。
飞行器的续航时间符合 10 小时的关键性能参数。在 IOT&E 期间,有 9 次飞行超过了 10 小时(COMOPTEVFOR 并未将每次飞行都安排在 10 小时以上)。最长的一次 IOT&E 飞行持续了 12.3 小时。早期作战能力部署期间最长的飞行持续了 12.6 小时,121 次飞行中有 48 次超过 10 小时。
模块化飞行器设计允许在 60 分钟模块化/可更换有效载荷关键性能参数阈值内更换有效载荷。飞行器在两个模块中的一个模块中携带有效载荷:机头模块或重心(CG)舱。光电/红外传感器安装在机头模块中。CG 舱装载通信中继有效载荷和自动识别系统。整个飞行器的组装只需 20 分钟。
嵌入式机头安装的电子光学/红外有效载荷需要在目标上方进行环形轨道飞行,以保持连续的覆盖范围和对目标的准确识别。偏移轨道的使用会导致机身长时间阻挡有效载荷的视场。有效载荷受阻的实际持续时间从 5 秒到 30 秒不等,取决于飞行器的高度、俯仰角和与目标的距离。在 IOT&E 期间,地面单元指示 RQ-21A 操作员在 32 次任务中的 28 次任务中使用偏移轨道。这些偏移轨道导致自动跟踪锁定中断,无法识别高价值目标。有一些轨道形状可以让 RQ-21A 操作员保持对目标的连续覆盖,但目前的 RQ-21A 操作系统限制操作员使用圆形轨道。
中波红外传感器不支持海上环境中的搜索行动。观察海洋等温度相对均匀的大型物体会妨碍传感器的自动对焦能力,导致图像模糊和光晕。
在对美国海军 "锚地 "号进行第二次对抗性评估之前,RQ-21A 项目办公室解决了在 "二十九棕榈 "号进行的第一次网络安全对抗性评估中发现的 RQ-21A 电子结构的网络安全漏洞。在安克雷奇号上进行第二次评估期间,又发现了新的漏洞。本报告的机密附录包含与网络安全测试有关的结果和相应建议。
