
在未来的数据密集型作战环境中,威胁可能会有很大的不同。其中一个例子就是速度可达 5 马赫及以上的导弹。要单独应对这类威胁,至少需要做到两点。第一,提供适当的作战设想,考虑到未来的远程威胁。其次,能够收集、过滤、处理和理解相关数据,以便在短时间内确定优先次序并做出正确决策,这一点可能会更加重要。第三,在考虑网络战威胁时,可将这些威胁视为以光速进行。总之,在未来战场上,从直接控制的传感器到人工智能(AI)引导的传感器,现有的不同类型的传感器很可能需要高效、动态的指挥和控制(C2)。在本文中,我们提出了一项实验研究,以调查传感器指挥与控制可以集中在哪个层面、分散在哪个层面或两者结合在哪个层面,以及哪个层面似乎足以在地理和信息扩大的作战环境中及时应对威胁。
1 引言
指挥与控制(C2)作为一个术语,在许多方面都是一个二分法,它指向组织管理任务中两个相互矛盾的方面。首先,它指向行使指挥权的创造性过程。其次,它指出了既制约指挥又使指挥成为可能的结构、规则和关系。指挥员要想提高效率,不仅要有能力应对手头的问题,还必须了解、有时甚至克服作为其所要指挥的组织基础的控制结构。无论控制结构是如何设计和实施的,一个军事组织都必须具备基本的 C2 功能,才能发挥作用。军事领域的一些思想家提出了这些功能的建模方法,如博伊德的观察-定向-决策-行动循环(又称 "OODAloop")[1, 2]、布雷默的动态-观察-决策-行动循环(又称 "DOODA loop")[3, 4, 5]、劳森的指挥与控制模型[6]等。几乎所有这些模型都包含以下 C2 功能:监控、感知(此处等同于布雷默晚期定义的定向)、决策/规划和执行/行动。在这些功能中,定向和决策功能一直是众多研究的主题[例如,见 3、4、7]。
收集情报的职能(以下简称 "监测")传统上一直由专业人员负责,他们汇总各种来源的信息,然后提交给规划者和决策者。如今,一些武器系统的能力和速度对这种方法提出了挑战。这不仅对近乎实时地更新态势图提出了挑战,也对指挥和分配传感器的 C2 流程提出了挑战。
在继续讨论时,我们将使用布雷默的 C2 理论框架,该框架通常以 DOODAloop 的形式描述[例如,见 3、4]。动态 OODAloop 这个名称基于博伊德上校著名的 OODAloop [1] 。最初,布雷默在其 DOODA 概念中定义了四个必要功能[7]:(1) 数据收集;(2) 感知,后来被重新命名为定向[见 5];(3) 规划;(4) 军事活动。
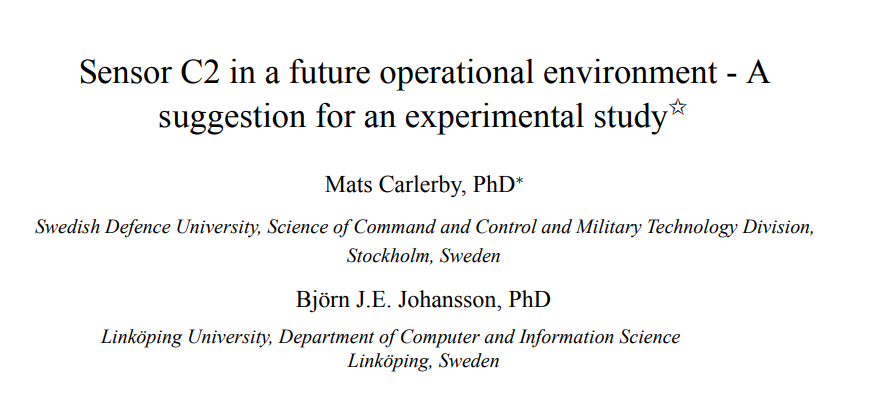
Spak 和 Carlerby 对最初的 DOODAloop 进行了改编[8]。在这里,C2 系统被视为系统环境中的相关系统 (SOI),其边界是任务响应系统(图 1)。在研究 C2 系统时,它基本上是由布雷默(Brehmer)提出的功能和流程组成的[例如,见 3、4、5],但在标注方面做了一些调整,并增加了一些元素。不过,考虑到构成任务响应系统的要素,即 C2 系统和执行系统及其相互关联的部分,它们本身都可以被视为系统。
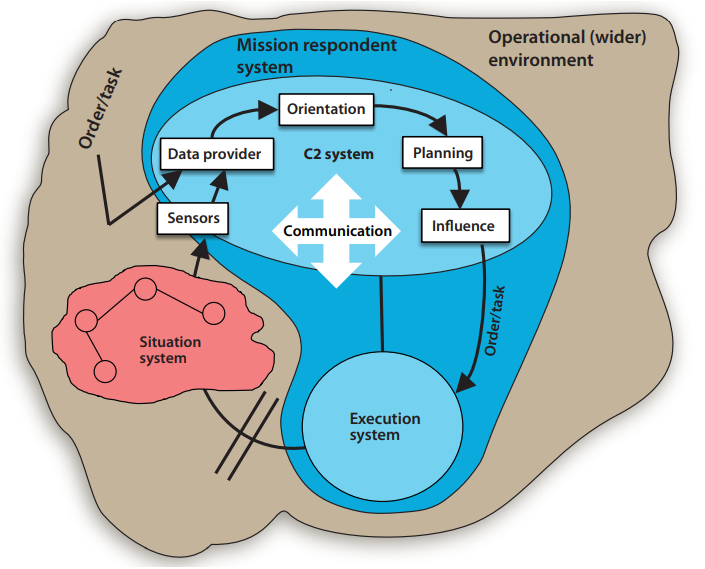
图 1:系统背景下经过调整的 DOODAloop。
1.1. C2 系统的子系统和功能
由子系统组成的 C2 系统与 Brehmer 关于设计逻辑的讨论有关[7,第 212 页]。由此,Brehmer 认为,C2 系统的设计基本上是一个自上而下的过程,首先要确定设计该系统的目的。下一步是描述系统应实现的目标,即系统实现目标所需的不同功能。最后,布雷默提出,设计的最后一步是通过考虑如何实现系统的功能来描述系统的形式。布雷默还强调,该方案可自下而上地用于理解现有系统的运行方式[5](图 2)。
尽管布雷默将他提出的设计逻辑与拉斯穆森的抽象层次[9]相联系,但他在最新的出版物[5,第 66 页]中也提到了阿科夫和埃默里[10]。不过,后两位作者确实使用了 "结构 "一词,而不是 "形式"。一般来说,这两个词可以等同看待。但在本文中,我们更倾向于使用 "结构 "的含义,即 "复杂事物各部分或元素之间的排列和关系"[参见,11]。此外,我们还赞同阿科夫和埃默里的观点,他们写道[10,第 16 页]:"目的的含义取决 于其所处的环境: "目的的含义取决于功能的含义,而功能是相对于结构而言的[......]。结构是一个非常笼统的概念,包括几何、运动、机械、物理和形态概念"。此外[第 26 页],"[f ]unction 和 structure 一样,是一个通用概念。它在任何意义上都不与结构相对立,而是[......]与结构完全兼容"。
这也与约翰森[12]提出的论点相一致,即结构既制约 C2 功能的实现方式,也使 C2 功能得以实现。因此,既然我们认为 C2 系统是由具有特定目的和功能的相互关联的子系统创建的,那么 C2 系统及其子系统的结构就值得关注。
显然,"系统 "一词是本文的核心,因此我们要界定其含义。正如 Spak 和 Carlerby [8]指出的那样,系统一词的含义多种多样,因此商定一个基本定义是有益的。由于我们的兴趣在于设计有目的的 C2 系统,因此我们在此采用了 Wasson [13, 第 3 页] 提供的系统定义: "一套综合的可互操作的元素或实体,每个元素或实体都具有特定的、有限制的能力,通过各种组合配置,使用户在规定的操作环境中,以成功的概率实现基于性能的任务结果,从而产生特定的指挥与控制、C2 行为"。
这一定义也与 Flood 和 Carson 所讨论的系统识别规则相一致[14,第 71 页]。在此,我们主要强调系统定义的规则,即系统本身或其组成部分可以控制潜在组成部分的功能或活动。因此,如果系统本身的任何方面能够控制其潜在要素,那么它就被视为系统的一部分。如果不能,而且它只能受到影响,或只能为系统提供输入(或接收输出),那么它就只能是已定义的系统环境的一部分。这句话很重要,在定义系统边界时也至关重要。
1.2. C2 系统的功能和子系统
将图 1 中的不同功能视为各自独立的系统,在 Brehmer [例如,参见 4、7、5]中找不到对这种观点的任何支持。因此,Brehmer 没有为上层任务或 C2 系统可能需要的目的性子系统提供任何支持。当然,布雷默与西蒙[15]的推论一致,认为每个系统[功能]都需要分解,直到达到可以找到特定系统结构的适当级别。例如,在设计生产适当产品的子系统时。总之,布雷默给出了一些子功能的例子[5, pp. 89];然而,由于布雷默主要将 DOODAloop 视为一个过程模型[5],因此缺少关于从功能到结构的转换,以及如何通过设计实现有目的和目标导向(目的论)的子系统的指导原则。
在此,我们的首要目标是提出一个基于控制论和系统科学的框架,在分析、设计和衡量 C2 系统的不同子系统的效率和有效性时可以加以利用。在此基础上,我们将提出实验研究的指导原则,以研究传感器 C2 的哪个级别(集中式、分布式或两者的结合)似乎足以在未来作战环境中及时应对威胁。
2. 系统、子系统和递归控制的必要性
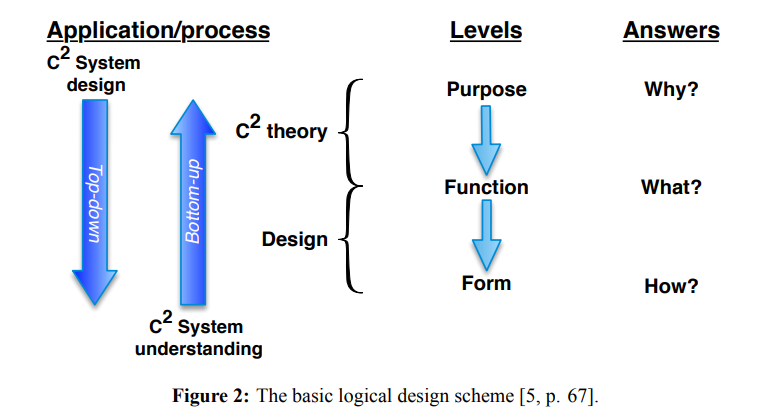
一个简单的 C2 系统至少需要两个相互关联的系统。一个系统可以行使指挥和控制权,另一个系统接受命令和/或控制。然而,当考虑到 C2 系统包含一定程度的复杂性(例如,由相互关联的子系统组成)时,它们通常具有一些一般特性。Lawson [16]举了一个例子,很容易与设计联系起来,如下图所示(图 3)。
在 Lawson [16]中,系统耦合图可以举例说明基于系统资产的应答系统设计。这些资产可视为由上层系统提供,用于处理某种情况,或称为 "情况系统"。情况系统和应答系统之间的两条线说明了两个系统的接口。在这里,情境系统既为应答系统提供输入,也是应答系统行动输出的接收者。
此外,在系统耦合图的支持下,还提供了具体的原则,确立了劳森[16,第 37 页]定义的十三条系统规则。其中一条规则是,应答系统的其中一个元素必须提供对自身资产的控制。然而,控制元素和应答系统的所有可用资产都可以被视为应答系统本身的功能或子系统。根据这一推理,我们可以得出一个前提,即设计的子系统必须包括一个控制元件,这也突出了将系统部件分解为所含子系统的递归性质。
3.C2 系统的适当功能和结构
在进一步探讨布雷默的 DOODAloop(图 1)时,可将 C2 系统视为上层系统(即任务响应系统)的一部分。任务响应系统可被视为旨在影响情况的响应系统,也可被视为情况系统,按照 Lawson [16] 的观点,情况系统本身就是一个系统。因此,按照 Lawson [16] 和 Flood 与 Carson [14] 的上述推理,我们可以使用这样一种观点,即 SOI 的边界要么环绕 C2 系统及其要素,要么扩展到也环绕所设计的任务响应系统,其中包括 C2 系统及其子系统。由此可见,任务响应系统的结构是由相互关联的子系统组成的,这些子系统提供了重要的功能,以实现预期的运行。如上所述,图 1 中描述的 DOODAloop 缺乏在更广泛的背景下探索 C2 系统结构和功能的特性。
我们发现,有两种著名的系统理论可以支持结构和功能现象。第一个理论是斯塔福德-比尔的可行系统理论(VSM)[17, 18]。在他的理论中,比尔着重强调了控制一个在动态环境中运行的组织所必须处理的内容。比尔提供了一个连接五个相互影响的系统的基本结构;不过,他只把每个系统作为一个黑盒子来展示,而没有详细说明。
我们在此考虑的第二种理论是米勒的一般生命系统理论(LST)[19]。米勒并没有为生命系统建立结构。不过,米勒指出了子系统与所谓的超系统之间的等级关系,以及系统虽然以物质和能量的形式表现出来,但却受信息支配这一事实。显然,这两种理论的侧重点不同,针对的细节也不同,这也意味着存在一些问题。
Nechansky 将 Beer 和 Miller 的两种理论进行了综合[如见 20、21、22、23、24、25、26],旨在克服两种理论侧重不同细节的困境。Nechansky 提议根据 Miller 的 LST [23],将 Beer 的数据处理结构转化为面向目标系统的功能和结构方法。
根据 Nechansky 提出的如何将两种理论结合起来的建议,也可以推导出应答系统的必要输入、组件、其功能、关系和系统输出(参见图 3)。此外,尼灿斯基还探讨了社会系统的目标价值及其走向,可表述如下[26]:
if{[(external sensor data S1) (relation) (goalvalue G1)]} AND {[(internal sensor data S2) (relation) (goalvalue G2)]}, then {trigger for a goalorientated action}
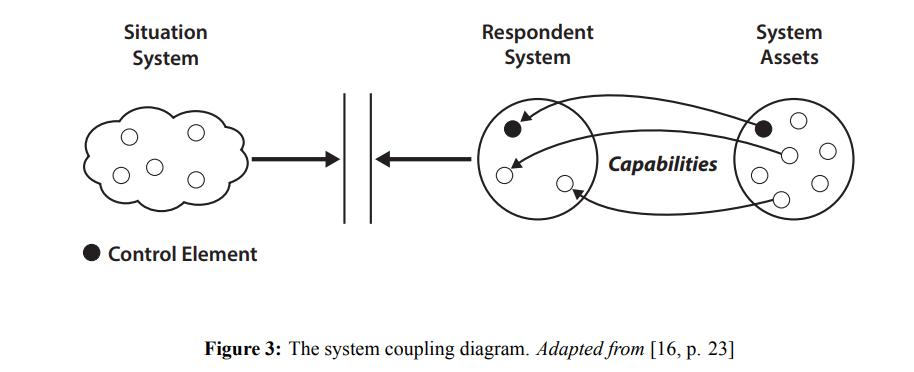
根据这一表述,从运行(外部)环境中收集数据的传感器和提供有关内部目标值实现情况数据的传感器都可以被考虑在内。Nechansky 提供了一个综合模型,其中包括 Beer 的系统 1 至 5 和 Miller 的生命系统。因此,内昌斯基[26]认为,米勒的物质能量处理子系统与比尔的系统 1(操作)相对应(见图 4)。不过,在讨论他提出的方法的有效性和局限性时,Nechansky 提出了一些可能会影响传感器 C2 的有趣意见[24,第 106 页]: "结构方面的考虑可能会明显松动,因为 Beer 的分级问题和相关的分级决策并不一定需要 [图 4] 所示的分级结构,也不一定需要为匹配 Beer(1979 年)的方案而开发的分级结构。任何具有足够数据处理能力的复杂系统都可以按顺序处理所有这些问题的逻辑层次,只需使用两个层次即可。然后,上层必须控制当前处理的是系统 1-5 中的哪些问题,并确保下层的决策使用正确的数据和目标值。这就是计算机处理这些问题的原理。这将把比尔的系统 1-5 问题的处理转化为两个结构层次,而不是如[图 4]所示的四个层次"。
上述针对 C2 的系统方法为同一个基本问题提供了不同的视角,即各种结构安排如何实现一系列基本功能。这一点已被应用到 C2 灵活性理论中,该理论认为,实现 C2 的不同结构安排或多或少适合应对不同类型的问题,用劳森的术语来说,就是情况系统[16]。
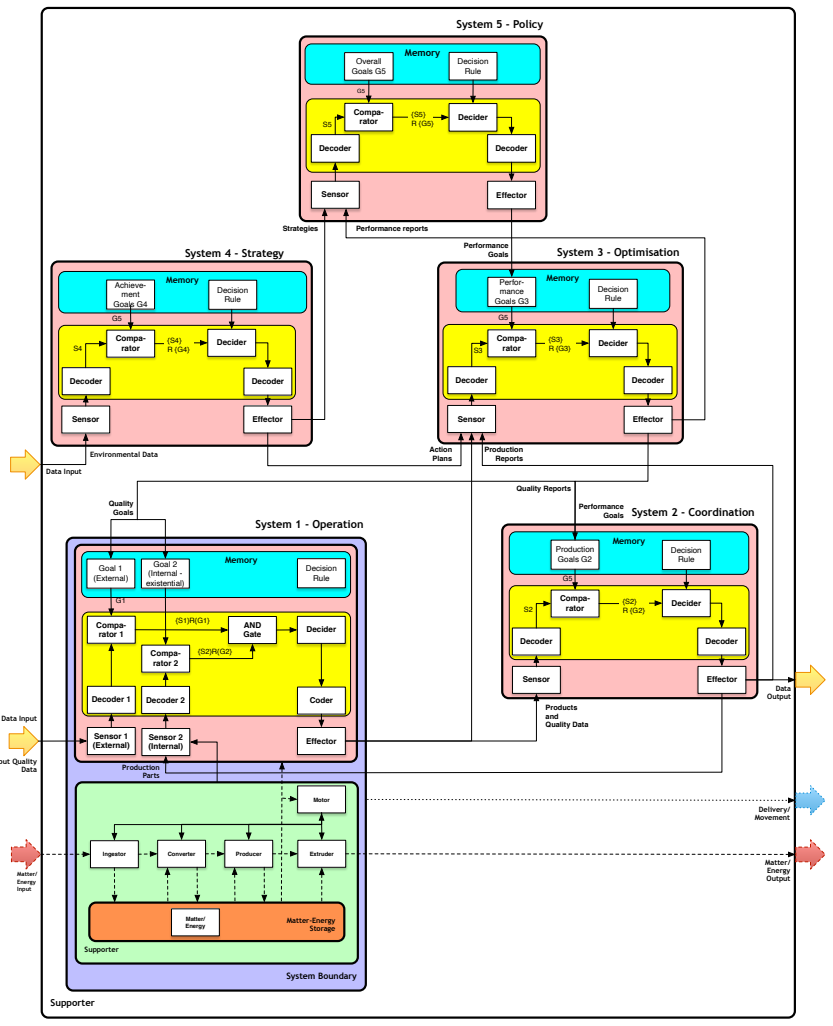
图 4:比尔提出的可行系统结构与米勒提出的生命系统结构(左下),以及一个可控制任何生产系统的放大反馈系统。改编自 [26]。
C2 灵活性理论认为,可以从三个基本维度来描述 C2,这三个维度是实现 C2 的方法框架:决策权分配(描述系统中控制权的分配方式,以及谁实际有权分配与情境系统互动的资源)、信息分配(描述系统中信息的传播方式,以及谁实际有权获取有关情境系统和自身资产的关键信息)和互动(谁实际可以与谁互动--通常与系统的组织结构相对应)。
如上所述,C2 灵活性理论的基本论点是,不同的结构配置将以不同的方式实现基本的 C2 功能,这些方式或多或少适合不同的情况。这一点在数据收集(感知)和数据处理(从人的角度看是 "感知 "或 "定位")层面就已显而易见。根据系统的结构配置,可用数据将被收集并传输到系统的某些部分,在那里进行处理并转化为某种类型的信息。根据系统内信息传播的安排和决策权的分配,这些信息又会被某些人处理和用于决策。
与任何控制任务一样,信息流动的速度必须使控制人员能够及时利用资产,以表达对目标流程或情况系统保持控制所需的各种信息。由于通信技术的局限性(或缺乏通信技术),C2 在信息流、互动和决策权分配方面,历来都是按等级组织的。由于战争一直是人类进行的活动,因此这种方法在很长一段时间内都是可行的。
二十世纪和二十一世纪的技术发展从根本上挑战了这一点,因为技术提高了战争的速度,远距离武器和后勤的地理分布也使士兵和武器系统的运输更加快捷。作为军事指挥中心结构的等级制度一再受到质疑[27, 28, 29],但作为组织/构建军队的主要方式,等级制度仍未受到挑战。正如本文开头所指出的,某些动能武器(如弹道导弹)的速度甚至已将数据收集的感知部分变成了一个重要议题。此外,非动能能力(如网络战)也是开发新型传感器的一个促进因素,以便对侵略者采取快速有效的反制措施。
如何在正确的时间将正确的传感器集中到正确的位置,越来越具有挑战性。在传统的科层制组织中,信息渠道的结构和决策权的分配通常是繁琐的。他们也不是传感器产生的数据的解释者。所有功能都被划分为若干子任务,由少数有权控制其他人的个人协调执行。这就在系统内形成了 "知识气泡",同时又承担着控制任务。
高度耦合系统(通常是自动化系统)形式的技术通过汇总来自多个传感器的数据并对数据进行计算机化分析来克服这一问题。物体被检测到、分类为目标、分配身份(ID)并进行跟踪,而不涉及任何人类活动。然而,实现其他功能(如定位和决策)的结构仍以等级形式体现。对于某些武器系统,存在局部变通办法,如将关键系统的决策权分配给操作同一系统的个人,如某些地对空导弹系统。这类系统通常是高度自动化的,留给人类操作员的唯一决定权就是是否攻击目标。然而,这种系统的位置和传感器的定向方式仍然是由军事组织中的参谋职能部门执行的高层决策。
4. 总结和未来工作讨论
传感器的 C2 是一个需要进一步研究的领域。正如上文对 C2 和控制模型的讨论所表明的,系统的传感能力是有效利用系统资产的关键因素。因此,我们的出发点与我们对设计具有适当功能和结构的有目的 C2 系统的兴趣有关。此外,本文的一个目标是提出一个基于控制论和系统科学的框架,在分析、设计和衡量 C2 系统不同子系统的效率和有效性时加以利用。然而,实现这些功能的结构可能有无数种分配方式。军事组织中常见的等级结构源于对其他人实施控制的需要。现在情况已不再如此。今天的系统是真正的社会技术系统,因为它们由具有先进传感能力的技术系统和人类操作员组成。
以往的研究表明,即使有大量关于时间压力下决策制定的研究,如 "动态决策制定",也主要集中在调节任务而非高级决策制定上[参见 30, 31]。利用微世界或所谓的缩放世界进行模拟研究是此类研究的一大突破,因为它允许在互动环境中进行受控实验[32]。这样就可以研究抽象的现实世界任务,如森林灭火和化学过程。实际上,这些问题需要对相关过程进行持续调节。与此相反,其他研究人员则应用微世界来研究复杂问题的解决,如扮演大城市的市长或第三世界援助项目的经理[30]。这些例子都没有真正反映上述问题,就人类而言,主要是预测威胁可能从哪个方向发生的问题。要研究这个问题,微型世界方法可能仍然有效。Gonzales、Vanyukov 和 Martin [33]提供了一份最常用的微世界的详细清单,对于想要从广阔的视角了解已开发的问题和模拟类型的人来说,这份清单很有参考价值。因此,微世界的目的是向参与研究的受试者展示一个可识别的问题。不过,微观世界必须足够复杂,以便让研究对象体验到具有一定不确定性的动态情境。Johansson、Persson(又名 Carlerby)、Granlund 和 Mattsson[34]认为,微世界可用于研究 C2,并提供了使用 C3Fire 系统进行研究的实例。
4.1.未来的工作
许多以前由人类执行的任务现在完全由技术系统来完成,而技术系统的运行速度之快,甚至需要更多的技术来监督。人类决策越来越多地涉及政策或目标设定层面的决策,而技术系统则以自动响应的形式执行复杂的任务链,接近我们所说的自动化。例如,"爱国者 "系统 MIM104 可识别身份标识,并将潜在目标呈现给人类操作员,人类操作员的主要任务是核实目标是否具有敌意,以及是否应与之交战。系统的所有其他方面都是自动化的。因此,系统中的人类部分只执行部分感知决策或布雷默定位和决策。不过,这要假定有人已经决定了传感器应该在哪里以及对哪些潜在目标进行感知。如果可以确定威胁可能来自哪个方向,而且威胁的移动速度足以让人类操作员有足够的时间确认目标是否具有敌意并决定是否与之交战,那么这对人类来说就是一项可行的任务。 另一方面,在未来的作战环境中,这可能意味着人类的任务越来越多地变成决定传感器的位置和方向,而不是执行 C2 循环中的定向-行动部分,因为后者需要比人类可能的速度更快的执行。这也与上文引用的 Nechansky 和图 4 中描述的模型有关。因此,在作战环境中实施现有技术和设想中的技术,也可能意味着被迫对 C2 进行 "技术压缩",在这种情况下,C2 周期中的定向-行动部分可由技术单独处理。例如,作为系统 2 实现的人工智能(AI)可以指挥和控制系统 1 的实例,并在一段时间内可以覆盖系统 3、4 和 5 的输入(参见图 4)。因此,传感器的 C2 已经是 C2 循环的一个重要组成部分,在不久的将来,它将变得更加重要。那么,应该如何处理理解传感器 C2 的问题呢?
要研究一个由人类代理和具有定位和决策能力的技术系统组成的社会技术系统如何应对安置和指挥传感器的任务,以应对高速威胁,需要一个能反映这些方面的模拟系统。它必须提出一个与现实世界系统类似的问题,尽管不一定要有很高的逼真度。没有必要模拟传感器射击链的每一个步骤。相反,它必须只反映传感器的布置和引导这一基本问题,然后根据有意义的目标,对传感器的布置和引导结果进行足够逼真的评估。这种模拟应能进一步进行模拟运行,以评估从何处发起攻击和使用多少弹药所造成的后果。因此,这种模拟可以是针对每种特定传感器配置的 "一击游戏",尽管可以模拟敌方采取的几种不同的似是而非的行动的结果。

