这项研究确定了易受迷雾影响的特定通信传感器特征,并提供了一种将其引入模拟、整合和建模高级框架(AFSIM)兵棋场景的方法。军事领导人利用有关战斗空间的多种信息来源,及时做出决策,以推进他们的作战目标,同时试图拒止对手的行动。不幸的是,战斗的复杂性加上对战斗空间态势感知的不确定性,情报过多或过少,以及对手对友军指挥和控制行动的有意干扰,产生了一层抽象的战斗空间迷雾。决策者必须理解、描述并克服这种 "战斗空间迷雾",以完成作战目标。这项研究提出了一个新的工具,即迷雾分析工具(FAT),用来自动编制一个场景中的通信和传感器对象清单,并列出可能影响决策过程的选项。FAT通过在AFSIM场景中引入和规范整个通信链路和传感器馈电的雾度来提高兵棋推演的真实性。研究结果证实,FAT提供了显著的好处,并且能够测量迷雾对AFSIM场景中战术指挥和控制决策的影响。
1 引言
军事领导人必须根据战斗空间情报和现有信息及时做出战略和战术决策。为了改善现实世界的决策,指挥官在虚拟兵棋推演中模拟他们的行动决策,以确定实现其目标的最佳路径。术语 "迷雾 "描述了军事决策者缺乏信息的情况。仿真、集成和建模高级框架(AFSIM)是一个建模和仿真软件,使用C++面向对象的方法来模拟基于地理的战争场景。在审查了几个认知决策模型后,雾识别和操纵方法(FIMM)被用来识别和调整指挥和控制(C2)场景中的雾度,传感器平台收集信息并通过通信链路传输给指挥官。指挥官处理这些信息,并将其传回给产生效果的平台进行执行。我们的工具--迷雾分析工具(FAT),引入了迷雾效应来操纵传感器平台和通信链路,具有普遍性。FAT是作为AFSIM的一个插件实现的。使用FAT获得的模拟结果有助于战略和战术决策过程,通过引入传感器平台和通信对象的不确定性,对应于雾和直接支持C2功能。FAT和FIMM与AFSIM相结合,产生了一个行为分析平台,以改善有争议环境中的作战决策。这项研究扩展了Setear将雾引入兵棋推演的方法,以及Lawson的C2模型和van Creveld的C2功能等决策过程。
2 文献综述
我们首先提供了背景和相关的研究课题,以便将决策过程纳入通过传感器和通信链路传输信息的指挥与控制(C2)环境中。下面的主题包括对军事模拟、战场C2、战场迷雾、认知行为决策模型和AFSIM能力的回顾。
2.1 军事模拟和兵棋推演
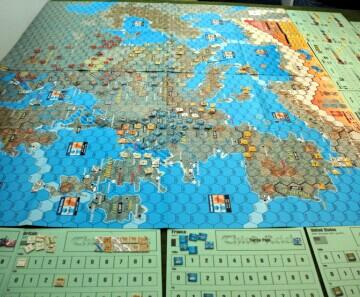
兵棋推演代表了一个军事场景,在这个场景中,双方或更多的人为了完成他们的目标而相互博弈。战斗空间是双方团队行动的冲突区域,通常由一个网格或基于地理的地图组成。兵棋推演的限制包括在地图边界内行动和攻击特定单位。指挥官从环境中收集信息,形成决策路径,并选择一条能产生最高概率完成计划目标的路径,同时将损失和行动风险降到最低。通常情况下,团队会确定一系列对手的重心、道德或体力的力量来源、行动自由或行动意愿。指挥官可以根据一个确定的尺度权衡多种决策路径,以选择最佳路径。当没有明显的赢家时,指挥官可能会花更多的时间来决定而不是行动。兵棋推演中的指挥结构链是指指挥官向下属发出执行命令的地方。
今天存在一些与AFSIM类似的应用。下一代威胁系统(NGTS)是由海军空战中心飞机部(NAWCAD)制作的军事模拟环境,提供实时军事场景模拟。NGTS对威胁和友军的飞机、地面、水面、地下平台、相应的武器和子系统以及战区环境中的相互作用进行模拟。半自动化兵力(OneSAF)是美国陆军开发的另一个用于跨领域分析的建设性的实时模拟软件。OneSAF拥有模拟士兵、后勤供应和通信系统的能力。这些军事模拟框架与AFSIM相似,但各自提供了其独特的能力。本研究使用AFSIM,因为它的可及性和对传感器和通信的特殊能力。下一节将讨论军事指挥和控制(C2)以及指挥链的功能。
2.2 指挥与控制(C2)
军事C2是由一个适当指定的指挥官对指定的和附属的部队行使权力和指挥,以完成任务。兵棋推演使用C2来构建指挥链、后勤和决策过程。C2通过分散执行集中的总体计划,增强了指挥官做出正确和及时决策的能力。联合出版物1列出了C2的原则:明确定义的权力、角色和关系;任务指挥;信息管理和知识共享;沟通;及时决策;协调机制;战斗节奏纪律;反应迅速、可靠和可互操作的支持系统;形势意识;以及相互信任。这些信条直接支持指挥系统的目标:指挥官和下属之间清晰、快速、准确的沟通。相反,这些信条也提供了引入迷雾元素的机会,有可能扰乱对手的C2能力。下一节重点介绍雾的定义以及分析员如何在兵棋推演中引入雾元素。
2.3 战争的迷雾
克劳塞维茨将战争定义为一个不确定性的领域。战争中行动所依据的四分之三的因素都被包裹在或大或小的不确定性的迷雾中。在现代战争中,战场迷雾是参与军事行动的人员在多个作战领域所经历的对局势的不确定性。联合部队指挥官(JFC)控制着来自不同作战领域的部队:空中、陆地、海上、空间领域,以及包括网络空间在内的信息环境。信息环境提供了一个在模拟中引入雾的主要机会,因为它包括与个人、组织和系统持续互动的物理、信息和认知层面。物理层面由C2系统、决策者和基础设施组成,使个人和组织能够创造效果。物理平台和它们的通信网络位于这个维度上。信息层面收集、处理、储存、传播和保护信息。这个维度的行动影响着信息的内容和流动。认知维度包含了那些传输、接收、回应或对信息采取行动的人的思想。这个维度的重点是个人的感知和决策以及认知的影响因素,如信仰、情绪和动机。在认知维度中引入不确定性可以直接改变决策者的认知,或间接改变决策者的认知发展方式。这项研究的重点是扩展战场迷雾的定义,以包括传感器数据的不确定性和连接指挥官和下属的通信联系。战场迷雾在认知维度上改变了行为者的认知,从而影响决策。
表1. 范克里夫德的八项功能列出了指挥和控制的决定性特征。
| 功能 | 描述 |
|---|---|
| 1 | 收集有关自己部队、敌人、天气和地形的信息 |
| 2 | 找到存储、检索、过滤、分类、分发和显示信息的方法 |
| 3 | 评估态势 |
| 4 | 分析目标并寻找实现目标的替代方法 |
| 5 | 做出决定 |
| 6 | 根据决定进行规划 |
| 7 | 撰写和传递命令,并核实命令的到达和接收者的正确理解 |
| 8 | 通过反馈监测执行情况,在此过程中不断重复 |
在关键区域引入雾化效应,拒绝、延迟或破坏对手决策过程中的数据,同时保护自己的C2完整性,是赢得战斗的核心。范克里夫德在表1中列出了C2的定义特征,即八个功能。这些功能为识别迷雾可能影响指挥链中信息的收集和流动的领域提供了一个基线。表1中的第一和第二项功能提供了一种不确定性,即信息在收集和从传感器平台传输到指挥官的过程中可能变得不准确。第三至第六项功能取决于指挥官的决策过程实施。这些功能可能提供不确定性的领域,但不在本研究范围内。第七项功能是指挥官与产生效果的平台的沟通。第八个功能是指挥官对命令执行的看法。后面这两个功能可能会因为命令在指挥官和下属之间的移动而变得延迟、不准确或被拒绝。后面章节的认知模型讨论了C2在既定决策过程中的这些功能。
兵棋推演使用不同的方法来介绍和定义雾。Setear提供了一种在兵棋推演中定义和模拟迷雾的一般方法。战场迷雾的来源是对敌人的不确定性、敌人的意图和敌人的力量。指挥官面临的自然环境和友军的行为也是雾的来源。最后一个来源是对支配战场上武器冲突的基本战争法则的不确定性。塞特尔强调,迷雾的来源影响着各级指挥官和环境。这一结果适用于战略和战术指挥官以及陆地、空中和海洋等环境。模拟不确定性的规则有助于战争者努力了解事件发生的原因,并从长远来看发现一个好的指挥官必须具备哪些特征。
Hagelback和Johansson指出,实时战略游戏中的迷雾元素是敌人基地的位置、对未知地形的探索以及对已探索地形的不可预测性。梅森说,在大多数即时战略游戏中,战争迷雾是一个术语,用来描述使游戏地图中只有有限的部分可供玩家的角色和所有盟军单位的组合查看的机制。部队的移动会转移这些可视区域,并导致以前访问过的区域逐渐消失在视野之外。这一机制动态地限制了玩家的信息,因为在他们当前的观察区之外的区域可能包含感兴趣的活动实体。进展要求最终与周围雾中的任何东西对抗,迫使玩家从战略上思考如何为这些未知因素做准备。这些雾的定义集中在地形的不确定性和敌军的力量或位置。
本节从雾的定义到它在兵棋推演中的实现进行了讨论。在这项研究中,我们将雾的影响定义为影响指挥官和下属的信息收集和传播的关键领域。这些雾效应改变了决策实体的认知发展,并对敌人的不确定性、友军单位和地理环境做出了贡献。下一节讨论了决策模型,并提供了在C2背景下对决策过程进行范围化的领域。
2.4 决策认知模式
决策认知模型提供了一个感知环境和执行决策以塑造理想状态的过程。本节讨论了博伊德的观察东方决定行动(OODA)循环模型和劳森的指挥与控制(C2)模型及其决策过程。
观察-判断-行动(OODA)循环是一种四步决策方法,它模拟了指挥官如何接收和过滤信息,制定决策,然后随着新信息的到来完善该决策。美国空军上校约翰-博伊德(John Boyd)将OODA循环理论化,最初是为了表达一种战术参与的方法,但后来,他将这个想法扩展到了广泛的战略行动。
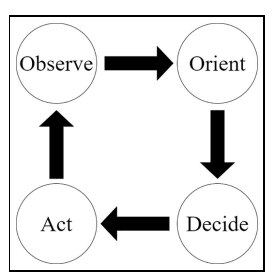
图1. 简化的OODA循环:该过程由四个阶段组成,决策者观察环境,形成可能的决策,作出决定,然后执行决策。
OODA循环由四个主要阶段组成。第一阶段,观察,收集与手头决策相关的信息。信息在内部通过反馈回路出现,在外部通过传感器或其他信息源出现。第二阶段,定向,包括破坏和创造,涉及最重要的认知工作。决策者将主要问题分解成他或她所理解的较小的子问题。通过对子问题的了解,决策者利用子问题的解决方案创建一个行动计划,并将其合并为一个统一的任务。如果决策者未能创建一个计划,他或她可能会认输。第三阶段,决定,考虑决策者可用的计划。如果决策者只能构建一个可行的计划,决定是是否执行。如果有一个以上的总体计划,决策者就会选择一个作为作战方案。决策往往涉及到权衡一个计划的风险或成本与它的潜在利益。单一的优势选择会导致一个自信而迅速的决定。然而,几个或许多同级别的决定会导致更长的决策时间。第四个阶段,行动,代表执行阶段,决策者执行所选择的决策。OODA循环的各个阶段是同时进行的,而不是按顺序进行的。图1展示了简化模型及其四个阶段。
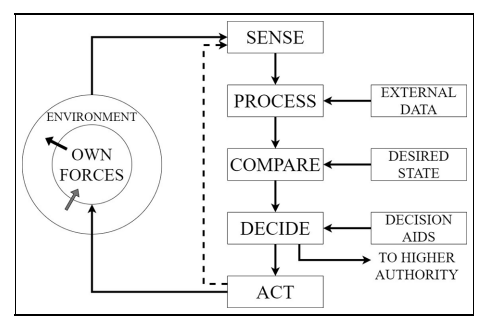
图2. 劳森C2模型:劳森C2模型过程。系统感知环境,将其与期望状态进行比较,并采取行动迫使环境进入期望状态。
1981年,劳森展示了他的认知模型,创建了一个军事C2系统,该系统源于一个更高的国家或政治愿望,以维持或改变有争议的战斗空间中的现状。C2系统包含了感知或感觉其环境状态的能力,将感知与特定的期望状态相比较,并采取行动迫使环境进入期望状态。这种方法包括信息收集和处理以及决策,类似于OODA循环。该模式在指挥链的不同层次上发挥作用,它要求指挥官收到环境的视觉表现,如图表、地图或电子显示。
图2说明了单个单位的劳森C2模型过程。单个单位感知环境,处理信息,然后采取行动。同时,上层的指挥官管理着多个单位,并持有一系列的传感器。劳森模型可以递归地使用多个指挥官来形成一个指挥链。然而,目前的模型已经足够了。
范克里夫德、塞特尔、博伊德和劳森的过程都汇聚到一个类似的主题。一个C2过程需要一个可以感知的环境,一组在环境中要完成的目标和目的,以及一系列实现目标和目的的决策。一个决策实体,如指挥官,可能会在这个过程的任何部分遇到迷雾。对环境的感知和信息的传递是需要考虑的两个重要方面。
图5中的决策模型来源于OODA循环和劳森C2模型中的流程。OODA循环和Lawson C2模型为感知环境、收集环境数据、根据目标形成决策以及执行决策以产生效果提供了基础。图5中的模型通过传感器使用环境感知和信息收集,并通过通信链接进行信息传输。FIMM使用图5中的推导模型来产生一个在C2场景中引入和操纵雾的过程。下一节将讨论AFSIM和它实现雾效应的能力。
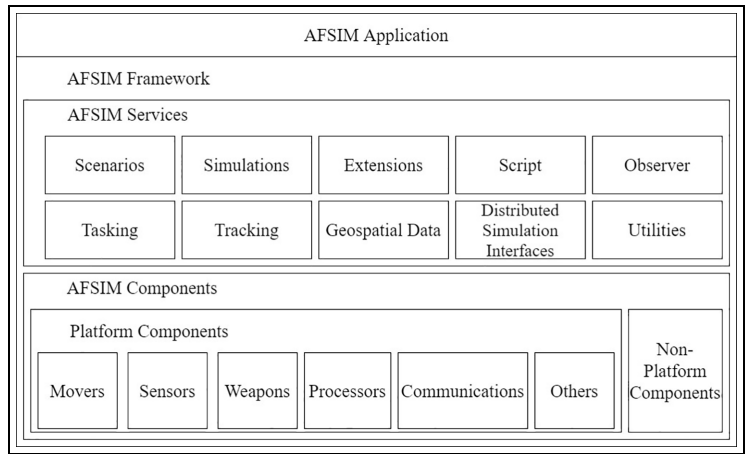
图3. AFSIM高层架构:该框架由服务和组件组成,通过扩展和插件进行延伸。
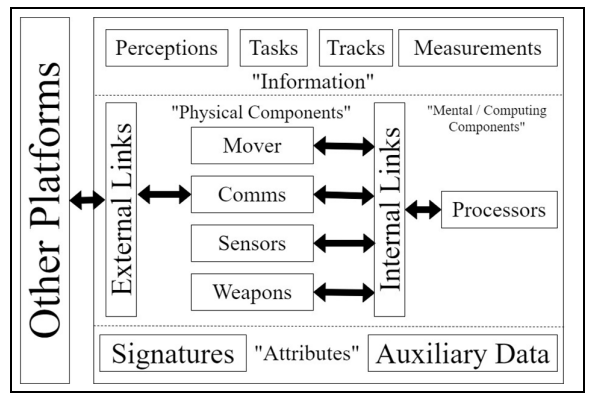
图4. AFSIM平台架构:一个平台持有关于其环境和组件的信息,以便在内部和外部进行互动。每个平台也有属性以区别于其他平台。
2.5 仿真、集成和建模的高级框架
AFSIM是一个面向对象的、C++的仿真环境,它为定制的交战和任务级战争仿真提供了原型。该框架包括一个仿真对象、数据驱动平台、移动器、传感器、通信网络、处理器、武器和仿真观察者的类层次结构。仿真和事件类的存在是为了控制基于AFSIM的模型的时间和事件处理以及实体数据的记录。该框架支持标准的地理空间环境和地形表现,支持通用的脚本语言,以提供使用文本文件访问框架对象,并支持在构造(批处理)和虚拟(实时)模式下执行任何AFSIM应用的能力。图3说明了高层架构。该框架的服务提供了仿真功能,而组件代表了仿真中的物理对象。
一个平台是一个容器数据结构,它可以容纳物理和精神组件和信息、属性和链接。图4显示了一个平台的架构和其内部组件之间的关系。搬运工组件定义了平台运动的行为,如空中、陆地和海上。传感器提供对具有特征的物体的感知。这些信息传递给轨道处理器,以便从本地环境中填充平台的轨道列表。内部和外部链接利用通信对象将信息,如轨道数据,传递给处理器和其他平台。处理器可以执行一些动作,如用武器对象进行火力控制,与插件和C2进程对接。其他平台可以将数据用于他们自己的处理器或信息存储。内部和外部链接利用消息传递来与平台组件进行通信。平台之间的消息传递是通过通信对象进行的。因此,传感器和通信对象为引入和操纵雾提供了一个直接的机会。
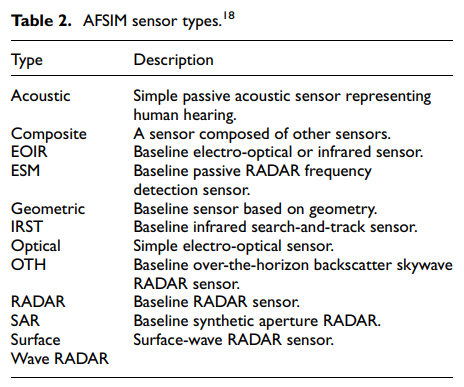
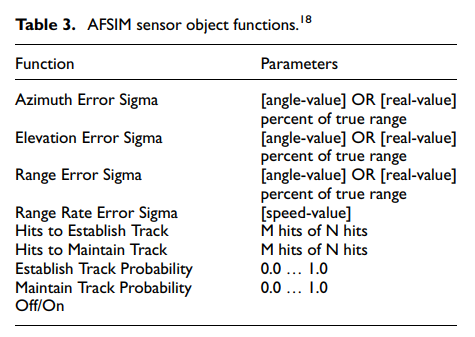
传感器为一个平台提供了检测其他平台及其组件的能力。AFSIM包含几个预定义的传感器,列于表2。传感器使用方位角和仰角限制来定义其影响范围,并持有形成轨道的能力。
用户可以为形成物体感知的传感器定义误差σ,σ为传感器的位置测量提供误差范围。传感器使用框架中的命令来定义其特征。跟踪报告命令定义了建立对另一个平台的感知的标准和产生的信息的质量。表3显示了与建立和保持对另一平台的感知有关的传感器功能。
方位角、仰角、射程和射程率误差西格玛命令允许分析员根据传感器报告的真实信息指定标准偏差。误差sigma是真实范围的百分比误差或误差值,其单位如下面两个公式所示:
Rp是感知值的范围,Vt是真值,Ve是有单位的误差sigma值,Pe是误差sigma值的百分比。下面是一个关于范围误差sigma函数的例子。一个传感器报告的真值是800米,但范围的误差sigma是20米。因此,感知值的范围是780到820米。接下来,建立和维持轨道的命中率是N个命中率中的M个,其中由于框架限制,N≤32,M≥1,而M≤N。 建立和维持概率,提供了一个额外的层次,即命中率是否创造或维持感知的对象。关/开指令提供了在脚本化规定的时期引入切入点的选项。
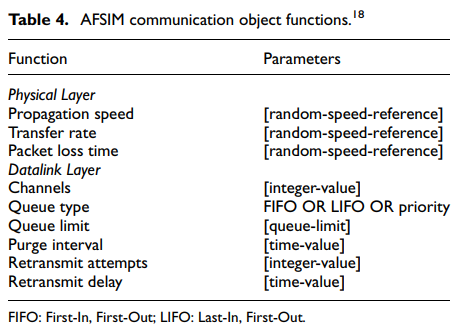
一个通信对象通过发射器、接收器和天线连接不同的平台。信息通过平台内的内部链接,显示平台组件之间的通信。当平台希望相互通信时,消息通过外部链接。通信对象遵循7层开放系统互连(OSI)模型;当一个对象发送消息时,消息通过对象的协议栈,直到平台处理信息。如表4所示,通信对象作为网络中的一个节点,具有拒绝、降低或改变数据流的各种功能。
传播速度决定了信息在节点之间传输的速度;默认情况下,传播速度是光速。传播速率是在给定时间内传输的数据量,如每秒100比特,而丢包则指定任何传输的延迟。这些命令可以通过限制指挥官的信息流来中断决策过程。数据链路命令处理信息的调度和传递。信道命令支持同时传输的信道,因此也支持多条信息路径。其余的命令为限制和命令数据的传输和重传提供了一个结构。这些命令与通信对象可能使用的更高层次的网络成员相互作用。网络对象使用寻址和链接来连接内部或外部的平台。通信对象可以附加到路由器和网关,以添加到另一个网络。本表中的命令提供了中断网络中信息流的雾化能力的选项。
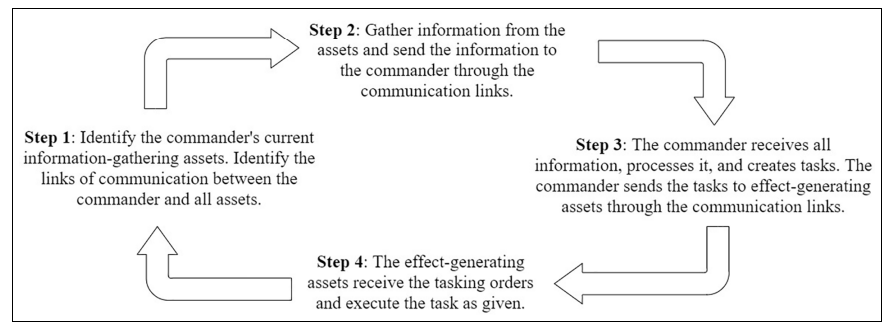
图5. C2决策过程:指挥官使用传感器平台来收集信息,使用产生效果的平台来执行命令。
3 方法
本节提供了一个在AFSIM中识别雾元素和开发FAT的过程。然后它定义了一个用于插件演示和分析的场景。
3.1 识别和操作雾元素
本节定义了在与指挥和控制(C2)有关的兵棋推演场景中识别雾元素的方法。图5中的推导过程侧重于在本研究特定的兵棋推演环境中做出C2决策。这个过程来自于范克里夫德的C2的八个功能和劳森模型。
这个循环首先是检查资产和通信链路的数量或状态是否发生了变化。这些资产为指挥官提供了感知环境的信息,并根据任务目标做出决定。指挥官向产生效果的资产(如武器系统或干扰平台)发送命令。人类玩家或脚本代理可以在兵棋推演环境中控制指挥官。C2背景决策过程将迷雾通过传感器平台收集的信息和指挥官通过通信链路发送和接收的信息。
平台通过表2所列的传感器感知并收集虚拟环境中的数据。传感器的中断会破坏平台的数据流,使指挥官无法收到完整的、可用的或准确的环境数据。传感器噪音或中断可能为指挥官提供一个不完整的战斗空间图景,使决策者无法实现当前的目标。传感器的噪音和中断会造成对敌人的行动和力量、友军单位的行为和指挥官的环境的不确定性。
通信连接允许信息在指挥官和下属平台之间流动。通信对象使用消息对象来包含特定类型的消息,以便在节点之间传输。通信节点通过有限制的链接连接。被切断的链接提供了另一种类型的信息切断,并产生类似于传感器切断的不确定性。如果一个链接被切断,一个传感器需要冗余的通信链接来继续运作。传输速率影响流经链路的数据的速度。一个死的链接将无法为指挥官提供当前决策周期所需的关键信息,因此,指挥官可能会形成一个无效的决策。当通信缓冲区已满,等待调度数据时,也可能出现关键数据的延迟。
图6说明了在一个特定的C2场景中识别和操纵雾元素的过程。这个模型将这个过程限制在一个负责传感器和效应产生平台的单一指挥官身上。指挥官和下级平台之间的信息通过通信链路流动。平台之间可能持有也可能不持有链接,以获得通往指挥官的多条路径。指挥官根据所感知的信息执行决策过程,而这些信息是在给定的配置中被切断的,噪音和对任务执行的干扰。产生效果的平台在它们通过通信链路到达时执行命令,而后分析查看指挥官如何完成任务目标。
雾识别和操纵方法(FIMM)使用本节说明的C2决策过程来关注传感器平台和通信链接。指挥官通过通信链路接收来自传感器平台的信息。这项研究假设产生效果的平台在通过通信链路收到命令时执行这些命令。然而,传感器收集的信息可能是不准确的,而且通信链路可能会发生问题,从而延迟或破坏数据。当受到不准确或延迟的数据时,下级会执行可能不符合指挥官意图的非预期命令。下一节将讨论一个AFSIM插件,以实现本节中的FIMM,使分析人员能够在AFSIM兵棋推演场景中操纵传感器平台和通信对象的雾化元素。
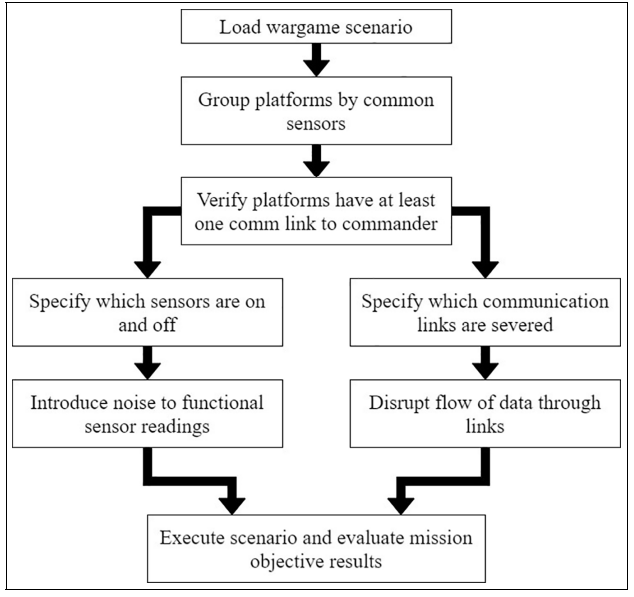
图6. 雾识别和操纵方法(FIMM):这个过程主要是在兵棋推演场景中修改传感器和通信对象。它主要侧重于拒绝、破坏和降低流经指挥官决策的信息。
3.2 迷雾分析工具
本节讨论FAT,它是AFSIM的一个插件,在一个加载的场景中显示当前的传感器和通信组件。每个组件都提供了引入和修改迷雾效果的选项。
FAT的目的是在AFSIM中为兵棋推演分析者提供一种直接的方式来修改传感器和通信对象的值,这些值与来自FIMM的雾功能有关。这个实现允许分析员一次修改多个平台和链接,同时绕过源文件的操作。该工具首先解析所有传感器和通信对象的当前加载场景。这些对象在AFSIM Wizard应用程序中以树状视图的形式填充到参数值方案中。分析员直接修改窗口中的参数值,相应的对象也会相应更新。图7说明了与该插件交互时的概念视图。
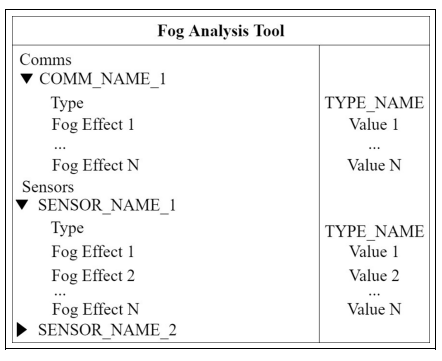
图7. FAT概念视图:该窗口显示两个通信和传感器对象的列表。每个列表都显示该场景使用的所有对象。分析师可以改变每个参数的值,而不是翻阅许多源文件。
这个插件的开发源自于平台细节和类型浏览器插件的实现。平台详情是一个Warlock框架的核心类,实现为Wizard子插件类。该插件搜索当前选择的感兴趣的平台,并显示一个关于平台信息的参数值列表。类型浏览器是一个独特的Wizard插件,它可以解析项目代理对象,以获取特定场景中所有类型的对象。当分析员改变方案中的任何内容时,代理和对象列表就会相应更新。该插件将对象分成几类,如平台、武器、传感器和通信。然而,这个插件与FAT形成对比,因为它不显示任何关于对象的信息。该插件只在激活时打开每个对象的文件位置。图8显示了这两个插件的图形表示。
FAT显示加载场景中的所有传感器和通信对象,并提供修改其值的选项。因此,当引入一个新对象或修改一个现有对象时,该插件就会更新。当项目打开、关闭或切换到另一个项目时,该插件也必须更新。FAT使用一个自定义接口对象从框架中检索数据,并将其更新到源文件的相应对象中。
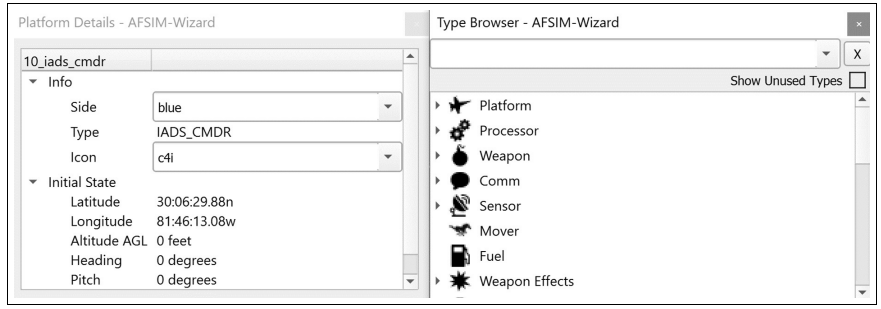
图8. 平台详情和类型浏览器:左边显示当前所选平台的信息。右边显示一个给定的加载场景中的所有对象
FAT实现框架函数,产生FIMM中显示的效果。表3和表4的函数提供了所需的效果。表3显示,方位角、仰角、射程和射程率误差西格玛函数直接影响传感器在感知另一个平台时的测量。命中率和概率函数影响建立和维持对另一平台的感知的难度。关/开函数允许模拟传感器馈电的切断。在表4中,这些函数影响信息流和干扰感知。影响信息流的功能决定了指挥官或下级何时收到信息。干扰感知命令帮助操作人员检测通信何时被干扰。FAT实现了这些功能来模拟噪音、切断和信息流。下一节使用AFSIM场景来验证雾效应的有用性。
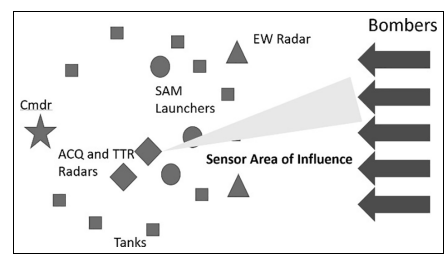
图9. IADS情景:一个蓝色的IADS小组使用多个防空导弹发射器来保卫10辆蓝色坦克,对抗5架红色轰炸机。
3.3 示范场景
本节研究了一个AFSIM场景,以验证所选择的雾化功能的有效性。该场景将多个平台整合到一个蓝色综合防空系统(IADS)组中。该小组由一个指挥平台组成,它管理着一个雷达连和一个防空导弹营。雷达连使用两个预警(EW)雷达平台来探测对手的轰炸机何时进入规定区域(见图9)。指挥官感知到对手进入战斗空间时,使用采集雷达(ACQ)来确定对手的位置,并使用目标跟踪雷达(TTR)从三个防空导弹基地之一发射导弹。蓝队保护n辆蓝方坦克不受m辆红方轰炸机的攻击。衡量结果是,在情景执行后,n辆总坦克中被摧毁的坦克数量。当红队摧毁了50%以上的蓝队坦克时,情景就会失败。指挥官平台通过链接到蓝方网络的通信对象接收来自其传感器平台的传感器数据。这个场景允许操纵多个传感器平台和通信链接。在这种情况下,要操纵的传感器是TTR平台,因为它直接跟踪并发送坐标,向红色轰炸机开火。其他传感器的噪声不会影响到TTR平台的瞄准,但其他传感器的切断会影响到指挥官是否启动TTR平台向红色轰炸机开火。AFSIM的任务信息是作为零位信息实现的,因此在这种情况下,唯一可以使用的通信迷雾效应是链接的切断。
下一节提供了插件功能和场景结果。对于每次模拟运行,在特定的水平上对x次模拟的雾效应进行测量,作为随机生成结果的不同种子。被摧毁的坦克数量的结果是取自x次模拟的平均值。对被摧毁的坦克的雾化效果找到了情景通过和失败的雾化函数的界限。
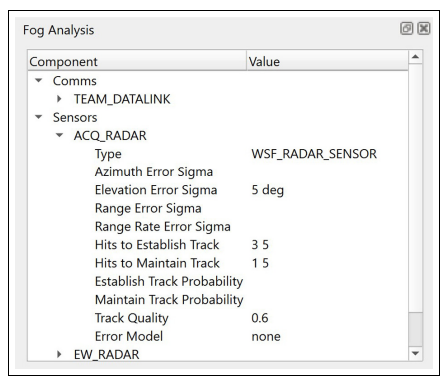
图10. 迷雾分析工具:该窗口为分析人员提供了方便操作迷雾效果的选项。
4 结果
本节讨论了FAT的功能和目前的软件开发进展。为使用FAT而设计的场景显示了该场景的成功与指定的雾效水平。
4.1 FAT功能
FAT插件使用CMake 3.18.0版本和Visual Studio Community 2019为AFSIM 2.7.0版本成功编译。该插件在项目解析时将传感器和通信对象填充到窗口中,并加载每个对象的参数-值对。当对象的名称被激活时,Wizard应用程序会打开编辑器文件。分析师可以操作每对雾效的值,它也会相应地更新。图10说明了AFSIM Wizard应用程序中的插件。
图11. 方位角和仰角误差σ:由于TTR平台的观察面积较小,误差的容忍度很低。
4.2 用于展示FAT效用的IADS场景
AFSIM对每个级别的雾效应进行了100次模拟,并测量了每次运行中被摧毁的坦克数量。坦克被摧毁的结果是所有运行的平均值。
超过一半(50%)的坦克被摧毁是蓝队的失败,红队的成功。该场景使用10辆蓝方坦克和5架红方轰炸机。通信对象传输跟踪,或感知,信息定义为50KB大小。图11显示了随着误差百分比的增加,被摧毁的坦克数量与方位角和仰角误差σ的关系。
该场景在方位角和仰角误差西格玛函数的2.5%和3%的误差之间进入失败状态。这些函数影响了雷达对轰炸机平台的感知位置。误差使红色轰炸机的目标定位出现偏差,并导致萨姆弹发射器向错误的坐标发射导弹。
AFSIM的射程误差西格玛函数没有产生百分比值的结果,但它产生了图12中的单位值。射程误差西格玛函数没有产生百分比值的结果是一个可能的框架错误。随着射程误差西格玛的单位值增加,被摧毁的坦克显示出稳定的增长。随着射程误差的增加,导弹错过了红色轰炸机,而蓝色坦克被摧毁。AFSIM的射程误差σ的函数没有产生任何可用的结果。
图12说明了进入125公里左右误差的失败条件的情况。导致失败条件的射程误差的增长似乎与更多误差与失败情景相关的趋势一致,但导弹爆炸半径为100米。与爆炸半径相比,它需要一个非常高的误差量,可能是由于框架误差或因为萨姆导弹发射器持有多枚导弹以实现冗余。
AFSIM认为M的最大值为32次命中,以建立和保持一个物体的感知或轨道。建立轨道的命中率导致防空导弹发射站失败,锁定红色轰炸机,更多的蓝色坦克被摧毁,成为关键命中。在图13中,维持轨道的命中并没有产生任何明显的效果。
当情景中没有其他雾效应存在时,保持轨道的命中功能可能不会产生任何统计结果。需要对有多种雾效的场景进行进一步分析,以验证保持轨道的命中率是一个好的雾效。
建立和维持感知或跟踪的概率较低,会导致萨姆弹站点无法锁定。随着图14中概率的增加,红色轰炸机被摧毁,蓝色坦克得到保护。
一个缓慢的传播速度,与光速相比为每小时1米,模拟了通信链路的中断。当没有链接失效时,模拟产生的坦克被摧毁的平均值为0.25辆。当指挥官、一个连长、一个传感器平台、所有防空导弹发射器或整个网络链接失效时,模拟产生100%的坦克被摧毁。当三个防空导弹发射器中的一个发生故障时,被摧毁的坦克平均数增加到0.75。当三台发射器中的两台失败时,平均坦克毁坏率增加到50%以上,场景失败。
图12. 射程误差西格玛:随着射程误差的增加,该场景以稳定的速度进入失败阶段。
丢包时间函数给通信对象的每次传输带来了延迟。这个延迟直接影响到网络中一个节点的数据传输。如图15所示,较高的延迟会对决策过程产生较高的影响,并使红色轰炸机能够摧毁更多的蓝色坦克。
传输速率函数影响网络中通信对象之间的信息流。该函数通过瓶颈效应直接影响数据的传输。这个功能需要定义信息大小。图16说明了在轨道消息的给定大小下,被摧毁的坦克与传输率的关系。
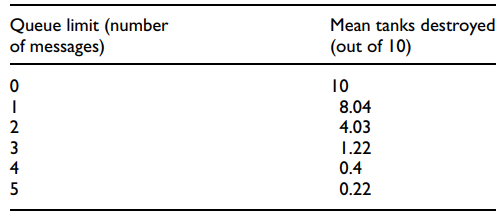
队列限制功能提供了另一个传输消息的瓶颈。一个低的限制会丢掉消息,而不是减慢传输速率,导致重传和到达目的地的等待时间延长。表5提供了改变队列限制的结果。
信道数、清除间隔、队列类型、重传尝试和重传延迟函数在这种情况下没有产生任何有用的结果。进一步分析的途径是对这些函数与队列限制函数的添加进行综合分析,以查看这些函数是如何相互依赖的。
选择坦克、轰炸机和情景运行的数量是为了简化情景的创建。修改坦克和轰炸机的数量将改变情景的雾化阈值。改变输赢标准以及信息大小也会对场景的雾化阈值产生同样的影响。当转移率接近消息大小时,雾的影响很低,但当转移率离消息大小较远时,雾的影响会增加。修改这些参数会对雾化阈值产生影响。因此,识别和控制AFSIM场景中的变量将使分析员在操纵迷雾方面有更多的控制权。
图13. 建立和维持轨道的命中率:随着所需命中率从32个增加到32个,该场景在建立轨道的命中率上达到失败。
本节展示了FAT在当前状态下的能力。FAT在进入核查和验证(V&V)过程之前需要更多的发展。V&V需要一套严格定义的软件结构和用户使用要求。下一节给出了一个结论,并对FIMM和FAT的未来工作进行了讨论。
图14. 建立和维持轨道的概率:较低的概率最终导致情景失败(超过5辆坦克被摧毁),但随着概率的增加,改变为通过情景。
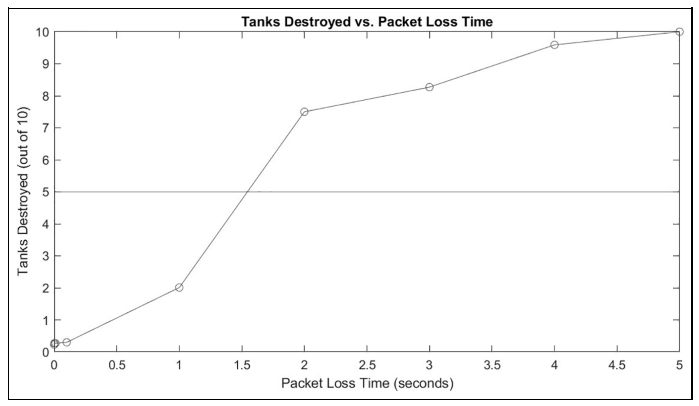
图15. 丢包时间:这个函数给通信对象的每次传输带来了延迟。该延迟随着它的增加产生更多的不确定性。
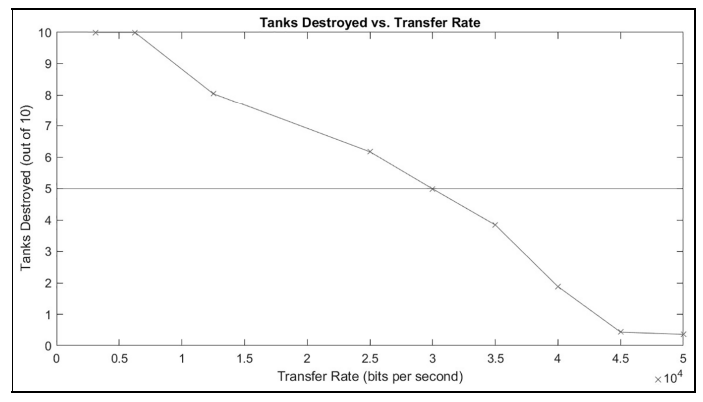
图16. 传输速率:通信对象在整个网络中传输50千字节的跟踪信息,并带有红色轰炸机的感知信息。当传输速率增加到每秒50千字节时,蓝色IADS组在到达目标之前就发现并消灭了红色轰炸机。
5 5 结论和未来工作
这项研究创造了FIMM,一个在兵棋推演场景中引入和操纵战场迷雾的过程,以及FAT,一个实现FIMM的AFSIM插件,并允许分析员将各种迷雾效果应用于AFSIM场景。FAT通过解析传感器和通信对象实现了AFSIM 2.7.0,用雾的效果填充了一个窗口,并允许分析员改变效果。每个场景都提供了一个雾的界限,在这个界限内场景停止成功并开始失败。这些结果对于不同类型的场景可能有所不同。最初的建模包括抽象方法FIMM和AFSIM插件实现FAT。该工具提供了破坏网络中信息流和为传感器读数引入噪声的能力。该工具没有向AFSIM引入命令,而是利用了现有的命令。它为分析人员提供了一种方便的方法,可以在情景运行之间改变雾值。
表5. 队列限制:零队列限制会拒绝所有传入的消息,并模拟类似于传播速度的切断。随着队列限制的增加,更多的消息通过通信链路传输,IADS组成功运作。
通过数据收集和传输,他的决策过程。通过传感器对象收集的数据通过控制指挥官对环境的感知与战争迷雾有关。在收集的数据中,更多的不确定性导致了感知的更大模糊性。通过通信对象的数据传输产生了一个问题,即指挥官可能无法快速收到数据以形成一个最佳决策。FAT验证了嘈杂的数据收集导致了错误的决策。另外,数据传输链路的中断导致指挥官的环境数据不完整或被拒绝。
IADS场景的结果强化了军事行动中的冗余理念。多个防空导弹发射器允许指挥官在一个失败时继续执行任务。结果表明,雾的影响会影响到场景的执行,随着影响的增加或减少,场景会失败。保持跟踪功能的命中率似乎没有对场景产生任何明显的结果,但可能存在一个场景,该功能确实如此。在传感器馈电中引入噪音会影响对敌方平台的定位。
美国军方专注于虚拟决策,以迭代可能的行动方案(COA)来选择最佳路径。然而,雾会以不可预测的方式影响决策。FIMM和FAT作为一个基线,将雾的影响纳入决策分析。愿景是决策代理人在这个过程中考虑到各种雾的程度,并利用这些信息选择最佳路径。军事分析家也可以在他们的场景中使用FIMM和FAT,以查看决策者在失败的目标之前可以处理的雾的界限。
这项研究需要更多的场景来测试其他雾元素如何影响决策过程,如干扰、延迟或丢弃通信网络中的网络数据包。这些场景证明了AFSIM中雾功能的有效性,噪声可以克服决策过程,导致场景失败。
FIMM的一个可能的研究领域是引入篡改或拦截通过通信链路传输的信息。篡改和拦截传输中的信息需要对手的干预和对网络的访问。这个领域可能需要一个专门用于网络战的单独框架或与AFSIM特定网络插件的接口。
FIMM的目的是提供一个抽象的方法来识别和量化不确定性的水平,以便在决策代理中考虑。该代理将遵循一个决策过程,如OODA循环和不确定性,当形成决策路径以完成任务目标。FIMM允许分析员帮助训练一个代理在受到各种雾的影响时克服雾。FAT是一种可能的实现方式,该过程分散在多个框架内。因此,另一个可能的研究领域是,在另一个军事模拟框架上实施FIMM。几个可能的框架是美国海军的NGTS,美国陆军的One Semi-Automated Forces(OneSAF),或Epic Games的Unreal Engine。