
自主系统的最新进展对学术界和工业界都产生了重大影响,开辟了新的研究途径。其中之一就是多个系统为实现共同目标而进行的协作,这就是所谓的合作系统。在缺乏人类智能、决策和感知能力的情况下,无人自主系统在一起部署和使用时,可以从彼此的能力中相互受益。本研究探讨了无人驾驶航空系统(UAS)群的协作问题,在这种情况下,由于单个飞行器受到限制,需要进行不同程度的协调与合作。这种合作的形式可以是物理支持,即任务要求超出单个系统的物理能力;也可以是情报级支持,即总体上需要更好的感知、处理或决策能力。本研究的目标是为一组选定的无人机系统和受限任务场景开发和集成协同制导与控制算法,这些场景包括通过带悬挂缆绳的多旋翼飞行器协同操纵空中有效载荷的任务,以及利用飞艇和多旋翼飞行器团队协同编队的任务。此外,本研究还旨在将所开发的个体和合作模型算法集成到高保真模拟中,以便在现实飞行任务中研究多智能体协作的有效性。
研究的第一部分侧重于单个航空系统的建模和仿真。案例研究中考虑的系统包括带有柔性电缆悬挂有效载荷的多旋翼飞行器和飞艇。在这一部分中,分别采用欧拉-拉格朗日法和牛顿-欧拉法推导出这些系统的数学模型。分析了柔性缆索模型的动力学特性,并将其与分析性猫尾式解法进行了比较。此外,为了提高仿真精度,还针对带柔性缆绳悬挂有效载荷系统的多旋翼飞行器实施了动量和几何结构保全变分积分器。
第二部分是为每个系统设计制导和控制法则,以提供姿态稳定和轨迹跟踪。首先,研究了一种基于线性化系统模型的游戏理论方法,用于减弱悬挂有效载荷的摆动。这种方法考虑了多旋翼飞行器与悬挂载荷系统的各种状态反馈情况。基于从这些线性分析中获得的启示,我们开发了一种以导管形状为依据的几何控制方法,用于该系统的姿态和轨迹跟踪控制。对于飞艇,则开发了线性和非线性控制方法。这些方法分别包括基于增益调度的线性二次控制和非线性动态反演(NDI)方法。然后对这两种方法进行了比较,重点关注它们的优势和实施的难易程度。
最后,针对任务目标受限的现实场景,开发了合作制导和控制法,要求一组无人机在物理或智能层面上进行合作。借鉴对柔性电缆的延展性分析,构建了一个合作控制场景。该场景展示了飞行器之间的合作,利用多旋翼飞行器对悬挂的刚性有效载荷进行空中操纵,其中的限制因素来自单个飞行器的有效载荷能力和飞行器之间通过柔性缆线的物理连接。其次,在涉及多旋翼飞行器团队的编队控制场景中采用了领导者-跟随者通信图拓扑结构,突出了基于扩展状态观测器(ESO)的总干扰估计模型的集成。该模型大大增强了系统对外部干扰和未建模动态的鲁棒性。最后,我们在一个示例场景中展示了这些研究的实际应用,在搜救任务中需要通过无人机系统提供合作编队支持。在这个场景中,我们还利用飞艇将多旋翼飞行器运送和部署到任务目的地,在那里执行编队任务,以适应各种编队形状和图形拓扑。这一场景需要物理和信息层面的协作,以增强区域覆盖、改善感知和态势感知。这里的限制来自单个飞行器的物理限制(如尺寸、续航时间、有效载荷能力和运行环境)和信息级限制(如处理能力、传感和通信能力)。这种情况形成了在现实生活中具有实际应用价值的基线。

图 1.1: 多旋翼协同飞行器携带通过缆绳悬挂的应急包执行空中有效载荷操纵任务的示意图
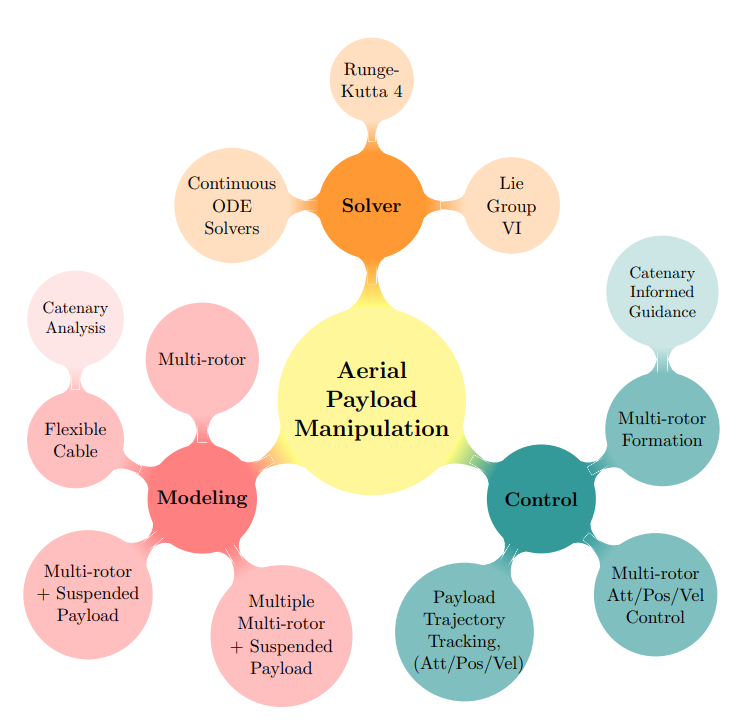
图 1.2:空中有效载荷操纵任务工作项目
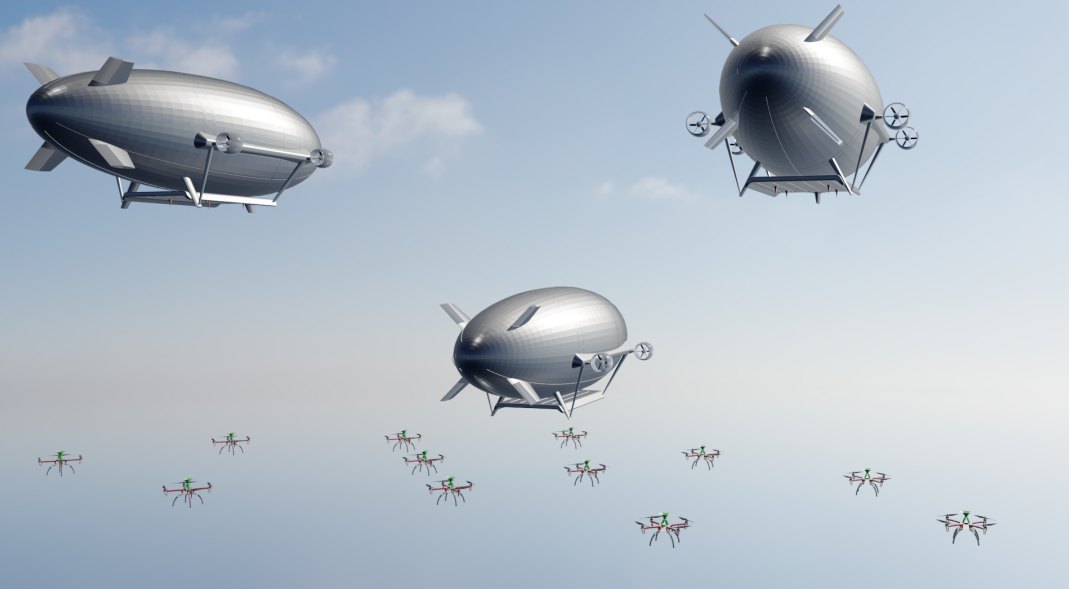
图 1.3:合作编队飞行任务示意图,多旋翼飞行器小组在飞艇的协助下作为领队节点引导编队飞行

