
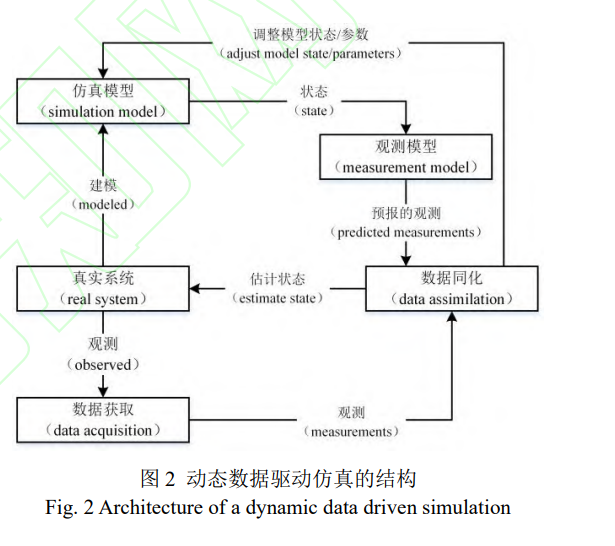
动态数据驱动仿真是一种“模型和数据相结合”的仿真范式,它将真实系统的观测(数据)持续注入仿真(模型),让数据动态地校正仿真(状态、参数),以此来提高基于仿真的估计和预测能力。由于动态数据驱动仿真融合了模型预测和实时观测两方面的信息,因此它能更准确地估计系统状态并预测状态的未来演化。本文梳理了动态数据驱动仿真的思想起源和基本概念,延伸介绍了“模型和数据相结合”的思想孕育的一系列仿真范式,并辨析了它们之间的联系和区别;详细介绍了基于粒子滤波的数据同化方法和identical-twin仿真实验方法;从应用场景、模型和数据、数据同化算法、与新技术的融合等四个维度综述了动态数据驱动仿真的研究现状;最后,从仿真模型、观测数据、数据同化、运行效率、应用领域等五个方面对动态数据驱动仿真未来研究方向进行了展望。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2024年6月21日
Arxiv
0+阅读 · 2024年6月18日
Arxiv
223+阅读 · 2023年4月7日
相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2024年6月21日
Arxiv
0+阅读 · 2024年6月18日
Arxiv
223+阅读 · 2023年4月7日