在高度受限与拥挤环境中协调机器人集群的复杂任务,常因机器人获取精确环境状态信息的能力受限而受阻——此类信息对引导群体达成目标至关重要。挑战源于环境中固有的不确定性与不可预测性,影响智能体与环境的交互。然而,密集活性物质研究表明,协调行为可通过自组织原则涌现,即简单的局部社交互动催生复杂全局构型与模式。本论文旨在利用密集活性物质的必然特征,实现无全局控制与显式他机状态信息下的机器人集群自发协同。具体而言,自适应堵塞控制技术通过非计划接触交互促成集群涌现性协调。该技术依赖机器人间的接触与碰撞(基于位置噪声估计与环境变化)。通过自主方向调整与个体任务参与度调节,可化解狭窄隧道中的持续性堵塞。进一步改进算法以应对个体故障对群体效能的负面影响:主动接触响应(ACR)算法为堵塞控制机制注入容错性,将故障机器人重定位至低干扰位态,确保隧道内交通流持续畅通与任务完成。
拥挤受限系统的这些特性同时应对多智能体强化学习(MARL)的基础性挑战。通过共享环境建立间接通信通道,智能体可估计并推理其他智能体活动的统计特征,从个体视角直接降低环境的非平稳性。数值仿真表明,利用局部物理交互与环境隐式通信可提升多智能体强化学习场景的收敛性与可扩展性。
最终构建数学模型阐释并验证自然集群在拥挤狭窄自生隧道中(无需全局控制或显式通信)表现的自组织行为。该模型与生物实验中观测的多阶段掘进速率相吻合,揭示接触与局部交互对自然群体自调控行为的关键调控作用。
• 第二章介绍了生物与机器人集群中利用局部交互作为协调技术的背景与文献综述,涵盖共识主动性(stigmergy)在多智能体强化学习场景中的应用,并综述多智能体系统容错技术。
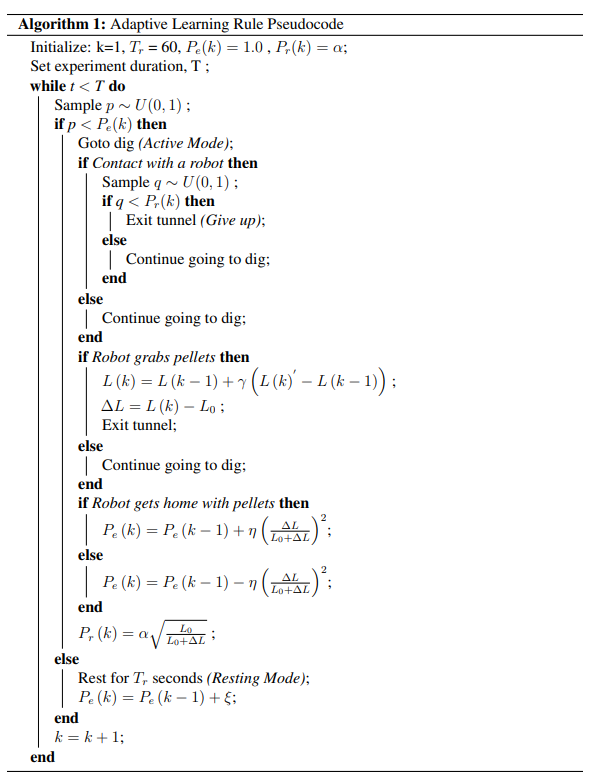
• 第三章提出自适应协议方法,用于学习预防受限多机器人掘进任务中的拥堵问题,展示长期真实机器人实验的实证结果。
• 第四章详述主动接触响应方法,增强第三章所述堵塞控制算法的容错性,呈现真实机器人实验结果并与基线算法对比。
• 第五章转向深度强化学习在拥挤受限环境中的多智能体协调,探讨通过虚拟信息素或共识主动性提升收敛性的方法论,并与既有基线算法进行比较。
• 第六章展示活体集群协调与适应技术的最新发现,构建蚂蚁掘洞实验的分析与仿真模型。
• 第七章总结全文,强调核心贡献并展望未来研究方向。