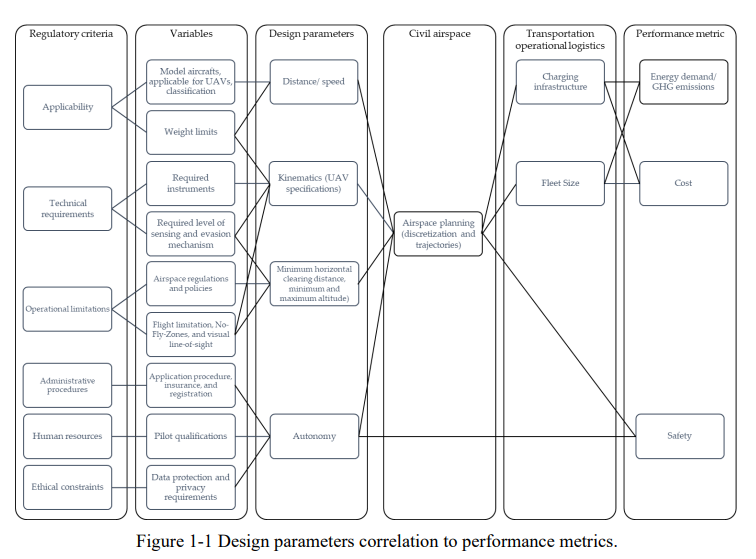
电动自主无人机(UAV)因其速度优势、经济性与显著温室气体(GHG)减排潜力,被视为城市终极颠覆性可持续技术方案。无人机融入未来智慧城市架构可产生广泛应用场景,尤其适用于"最后一公里"物流——相较于轻型卡车等传统方式,其有望降低配送成本、减少碳排放并缩短交付时间。然而在现有城市空域中,异质化无人机群在密集城区低空规模化运营面临多重技术挑战。作为缺乏实际运营数据的新兴技术,现有文献仅考虑部分系统设计参数,常忽视运动学与空域政策等关键要素影响,导致能耗估算、航程预测与排放评估存在显著偏差,影响全系统设计的准确性。因此,有效的无人机系统设计需全面考量参数间交互影响以实现优化集成运营。本研究基于加拿大多伦多市物流需求数据与数字孪生城市模型,通过实验标定的先进柔性能耗模型生成最小能耗轨迹,并创新提出空域离散化、轨迹优化与充电设施配置模型,系统揭示各参数对运营效能的影响机制。
本研究首次量化空域政策、离散化方案与轨迹生成对无人机能耗的影响,揭示运营不确定性对成本、排放与充电设施需求的关联效应。区别于现有文献,本工作涵盖所有系统设计参数及其对性能指标的交互影响,提出融合空域离散化与轨迹生成的创新算法,实现能耗优化、空域容量最大化、交通管控与离网太阳能充电站配置协同优化。研究发现:定制化空域政策可使货运无人机较电动汽车减排35%;建筑一体化光伏(BIPV)升级可消除排放并通过余电利用显著降低脱碳成本。本成果为从业者、政策制定者与学术界提供独特洞见。
• 第一章:阐述研究背景与动机,明确研究目标并概述论文结构框架
• 第二章:建立柔性无人机能耗模型(经实飞验证),对比不同政策下无人机与柴油/电动地面运输的二氧化碳当量排放。通过国际空管政策聚类分析(分三级严格度),基于真实物流数据开展城乡三位数邮政编码区域全天包裹配送仿真
• 第三章:通过开源自主编程框架与数字孪生模型,解析空域规划与离散化对能耗影响。创新提出动态4D离散化("天路")方法,与传统笛卡尔离散化进行10项任务轨迹规划对比
• 第四章:评估空域政策对最后一公里配送场景的能耗与充电站配置影响。构建政策敏感型全覆盖系统优化模型,提出充电站最小化配置算法
• 第五章:提出高密度城市空中交通(AAM)物流系统。详述实时3D激光雷达地理空间建模框架,深化双地理围栏动态4D离散化方法(第三章"天路"),基于多伦多实景开展1,138次航次笛卡尔离散化与创新算法效能对比
• 第六章:开发融合无人机运营与建筑光伏的多目标充电设施优化模型。通过12,532次大型城市日间任务仿真,验证"最后一公里"零排放解决方案可行性
• 第七章:总结研究成果,提出未来研究方向
相关内容