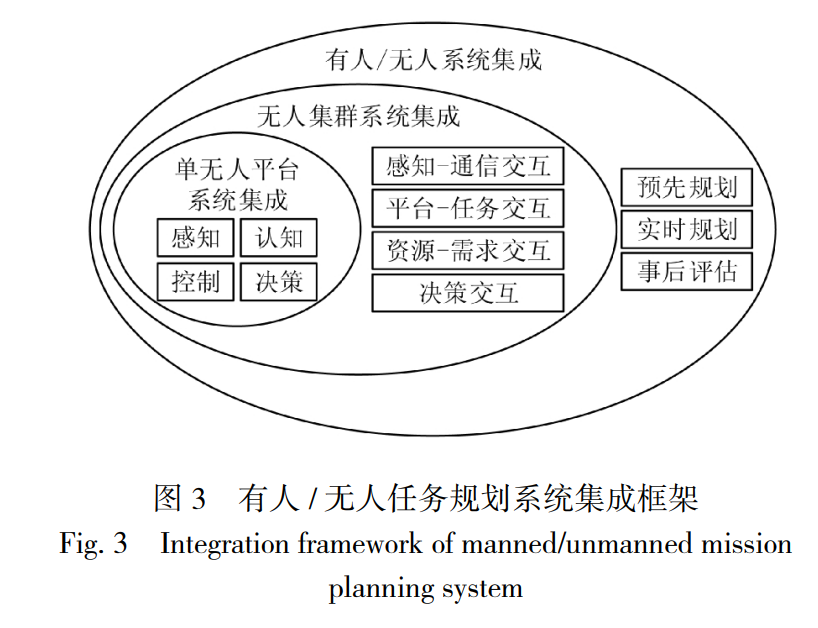
在复杂环境中, 环境动态性和任务多样性给无人集群自主协同、有人系统与无人集群协同带来了巨大挑战. 为此, 提出了 有人 / 无人集群任务规划系统集成框架. 该框架集成无人平台自主行为规划系统, 无人集群分布式系统与有人 / 无人集群系统. 无 人平台通过感知、认知、决策与控制完成自主行为规划. 无人平台间通过交互信息, 彼此决策方式协同规划. 有人系统支持在预先 规划、实时规划与事后评估阶段与无人集群的协同交互.
近年来, 在人工智能、大数据、云计算、物联网 等先进技术的推动下, 无人平台已经被广泛应用到 物品投送、环境保护、抢险救灾、农药喷洒、灯光表 演、地图测绘、侦察追踪等领域, 在极大解放劳动力 的同时, 还能够替代人类执行枯燥、恶劣、危险的任 务, 正在国民经济建设和国防领域扮演着越来越重 要的角色[1] . 随着所承担任务的工作量和复杂性不断增加, 无人平台在载荷、续航、决策等方面的负担不断加 剧, 逐渐暴露出任务执行能力弱、效率低、灵活性差 等问题. 因受制于现有技术和成本, 依靠无人平台的 作业能力难以胜任不断涌现的新任务需求. 无人平 台的研究在工业生产、抢险救灾等实际环境中具有 时代意义. 近些年, 研究者们面向多无人平台协同任 务规划方法研究, 依靠无人集群实现目标侦察、跟踪 与围捕等实时任务规划, 在实际的环境中具有广阔 的应用前景. 特别是在军事领域, 可以实现对入侵者 的侦察、监视、打击、毁伤评估等, 提高了军队各类 设备的智能化程度, 在安全保障方面提供了新思路、 新方式各军事强国对无人集群任务规划能力高度重视, 视之为改变未来战争制胜规则的颠覆性力量. 2018 年 8 月, 美国国防部发布了 《无人系统综合路线图 2017-2042》[2] , 提出了美国无人系统领域发展的 4 大 主题和 19 项关键技术. 4 大主题是互用性、自主性、 网络安全和人机协同. 19 项关键技术包括了机器人 技术、人工智能、集群能力等. 美正在开展的代表性 项目如“小精灵”项目、“进攻性蜂群使能战术”、“试 验性验证网关演习”项目等均取得了突破性进展[3] . 2021 年 10 月,“小精灵”项目空中回收“小精灵”无人 机实验成功, 迈出无人集群韧性灵活执行任务的关 键一步[4] . 2021 年 12 月,“进攻性蜂群使能战术”项目 融合虚实结合技术, 通过沉浸式蜂群界面对蜂群指 挥控制, 为有人/无人协同执行任务提供了技术支 持[5] . 2022 年 4 月,“试验性验证网关演习”完成了由 30 架无人机组成的无人集群作战试验. 此次试验采 用空地协同、分批发射与分布式控制的方式, 依次完 成侦察、防空压制、打击与毁伤评估任务. 集群作战 概念由“无人机蜂群”转变成“无人机狼群”, 是低成 本无人机集群作战的全新作战理念[6] . 在实际战场中, 2020 年 9 月, 阿塞拜疆部署由 6 架异构无人机组成 的无人机集群, 摧毁了亚美尼亚的防空系统, 导致亚 美尼亚地面资产遭受大量破坏[7] . 在国内, 2021 年 11 月, 中国电子技术标准化研 究院发布《智能无人集群系统发展白皮书》, 指出智 能无人集群系统的任务复杂度普遍提升, 对于集群 系统的智能化、鲁棒性提出了更高的功能与性能要 求[8] . 2018 年 1 月, 国防科技大学智能科学学院无人 机系统创新团队开展了 20 余架次的无人机集群自主 协同飞行试验, 验证了空中集结编队、定向编队飞行 和编队协同侦察等任务执行能力[9] . 2020 年 9 月国内 民营企业, 成功地组织了 3 051 架无人机同时集群飞 行, 创下了集群控制新的世界记录[10] . 这些项目在无 人集群任务规划相关技术进行了大量深入的探索. 值得注意的是, 目前无人平台的自主性处于“弱 智能”阶段, 无人集群协同感知、决策、控制能力略 显不足, 逐渐暴露出灵活性差、计算能力低、环境感 知能力差、任务执行能力差等问题, 有人系统与无人 集群之间存在态势把控难、实时信息交互慢等问题. 传统的无人集群在态势感知、资源整合、组织协同 等信息力方面的缺陷直接制约了有人系统与无人集 群协同执行任务的完成率和时效性. 与此同时, 考虑 在复杂环境中目标具有动态性, 任务具有实时性等 特点, 进一步增加了执行任务的难度. 因此, 如何建 立智能有人/无人集群任务规划系统集成框架, 有效 地组织、管理无人集群, 实现单无人平台自主行为规 划、无人集群自主协同、有人系统与无人集群协同, 具有十分重要的研究价值.