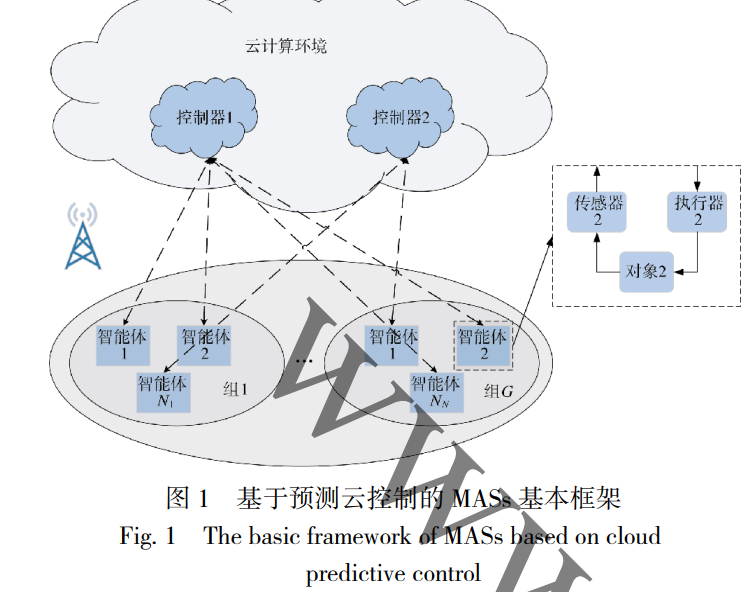
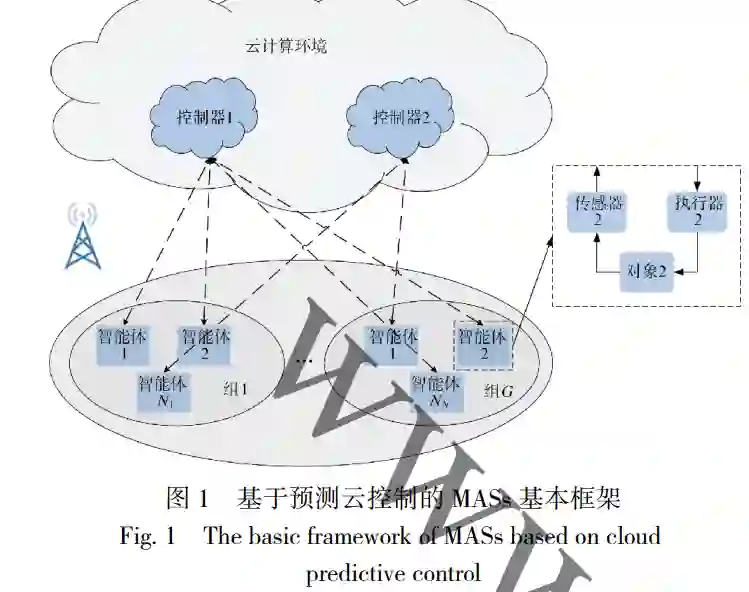
针对具有未知扰动的多智能体系统, 设计扩张状态观测器, 估计每个智能体的状态和受到的扰动, 并通过无线网络发送 给邻居智能体. 利用 Stackelberg 博弈描述多智能体系统的带宽分配问题, 设计了可以补偿网络时延的预测云控制方案, 给出了 Stackelberg 博弈的纳什均衡解和多智能体系统一致性和稳定性条件, 通过仿真算例验证了方法的有效性.
随着计算机科学技术、人工智能技术和网络控 制技术的飞速发展, 多智能体系统(multi -agent systems, MASs)引起了广泛的关注, 已应用于智能电 网[1-3]、智能交通[4]、自动驾驶[5]、传感器网络[6]等领 域, 一致性问题是 MASs 的基本问题[7-13] , 该问题旨在 通过与邻居交换信息来使所有智能体达成一致. 大 量的 MASs 通过无线网络交换信息, 不可避免地受到 噪音信号的干扰. 扰动的存在会影响系统的性能, 甚 至严重破坏系统的稳定性. 扩张状态观测器作为自 抗扰控制器的核心, 可用于同时估计状态和扰动. 然 而, 在考虑网络延迟的情况下, 如何较精确地估计系 统状态和扰动需要进一步研究. 在 MASs 中, 随着智能体结构的变化和规模的增 加, 数据的实时处理和计算的速度需要得到严格的 保障, 使用传统分析方法很难处理这样的实时大数 据和计算. 同时, 控制系统中的海量数据将增加网络 的通信负担和系统的计算负担, 一个高效的带宽分 配方案就变得尤为重要. 此外, 由于数据是通过网络 传输的, 网络时延对 MASs 的影响至关重要, 需要设 计相应的控制策略以主动补偿网络时延. 因此, 在大 规模的云控制系统中, 合理分配带宽以充分利用通 信资源非常重要, 这有助于提高效率, 减少不必要的 资源浪费;另一方面, 如何补偿 MASs 存在的网络时 延和受到的扰动也是一个关键问题. 基于以上分析, 研究了一种考虑网络时延和未 知扰动的 MASs 的带宽分配和预测云控制方案. 本文 的贡献总结如下: 1)对于具有未知扰动的 MASs, 提出了一种基于 预测的扩张状态观测器, 以估计每个智能体受到的 扰动并设计控制器进行补偿. 2)Stackelberg 博弈方法用于解决 MASs 的带宽 分配问题, 该问题包含预测云控制器之间的非合作 博弈和智能体之间的演化博弈. 3)提出了一种预测云控制方案, 以补偿受带宽 分配影响的网络时延和扰动. 并给出了保证 MASs 稳 定性和一致性的充分条件.