
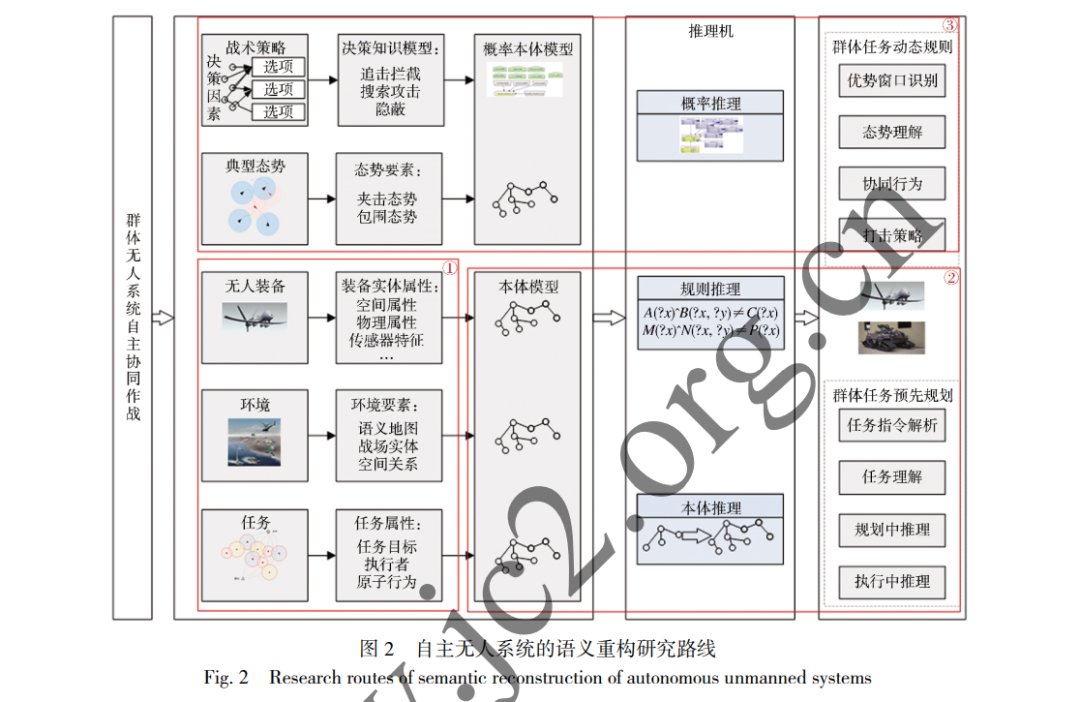
针对无人系统实现高级任务自主性的问题,提出在语义层重构自主无人系统的技术路线。分析了自主无人系统关键能 力需求,阐释了语义重构的内涵、优势和运行机理。自主无人系统的语义重构技术路线强调:通过在语义层重构自主无人系 统,实现无人系统任务、环境和系统自身的语义化描述;通过构建知识本体实现领域知识的统一表示和群体信息共享,利用语 义知识引擎实现群体认知达到任务协同和能力互操作的目的;利用知识推理和不确定性知识推理实现认知基础上的任务自主规 划。通过在语义层重构自主无人系统,将自主无人系统的规划问题上升到认知层面,实现硬件与软件,规划问题与规划方法, 人类干预与自主规划等问题的解耦。
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复或发消息“MM3D” 就可以获取《《多模态3D场景理解》最新综述****》专知下载链接
点击“阅读原文”,了解使用专知****,查看获取100000**+AI主题知识资料**
成为VIP会员查看完整内容
相关内容
Arxiv
42+阅读 · 2023年4月19日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
152+阅读 · 2023年3月29日

相关VIP内容
相关资讯
相关论文
Arxiv
42+阅读 · 2023年4月19日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
152+阅读 · 2023年3月29日