无人值守系统的不断发展以及相互连接的智能体和云技术揭示了人类和机器的角色之间的界限迅速模糊,以及无人值守系统和其他自动化进程的概念之间的区别。在未来,我们需要减少对无人系统的监督,而更多地关注人类和自动化过程之间的多方面的、协作的和互动。有效的人类-自动化编队技术将使自主系统能够在危险环境中稳健运行,支持快速作战节奏,或在高度受限和混乱的环境中围绕人类、载人平台和其他自主系统运行并与其互动。
鉴于人类和自主智能体的角色不断变化,北约应实现灵活、可调整和可信赖的自动化,并在用户主权下运行。研究任务组(RTG)HFM-247探讨了快速发展的人机编队协作的领域。这个RTG由代表7个北约国家20名专职科学家组成。HFM-247确定并展示了成功的编队方法和界面设计实践,这些方法和实践可以实现对任务和环境的共同认识,对意图的双向理解,动态的工作分配,以及有效的人类自主任务协作。这项研究活动的最终目标是通过灵活和强大的人机协作提高北约行动的有效性。
任务目标
在前期工作基础上,目前的TG HFM-247确定并展示了成功的人机协作方法和界面设计实践,允许共享任务和环境的态势感知(SA),双向理解意图,动态工作分配,以及有效的人机任务合作。
在这个任务组中,探索了许多相关的研究领域。例子包括:
- 可调整的和适应性的自主系统。
- 权力分享概念。
- 有人-无人团队的态势感知和性能。
- 意图的双向传达。
- 基于目标的控制方法。
- 人-自主问题的解决/合作对话。
- 决策支持界面。
- 态势评估辅助工具,行动影响的反馈。
- 预测/前瞻工具,预测性支持。
- 为时间紧迫的团队决策提供智能辅助;以及
- 多模态交互,直观和自然语言交互。
研究方法
HFM-247采取了一种结构化的方法来研究人机协作(HAT),允许在选定的领域进行创造性的探索。该小组首先建立了一份人机协作研究挑战的初步清单,并在工作结束时,根据在该小组生命周期内获得的知识,对该清单进行了重新审视和完善。该小组首先回顾了人人协作(HHT)的文献,以确定可能适用于人机协作的经验教训、指导方针和衡量标准。这一努力被证明对了解最能影响团队动态的因素非常有意义。这种人与人之间的团队合作调查也使该小组能够确定HAT与可能出现的独特挑战有何不同。
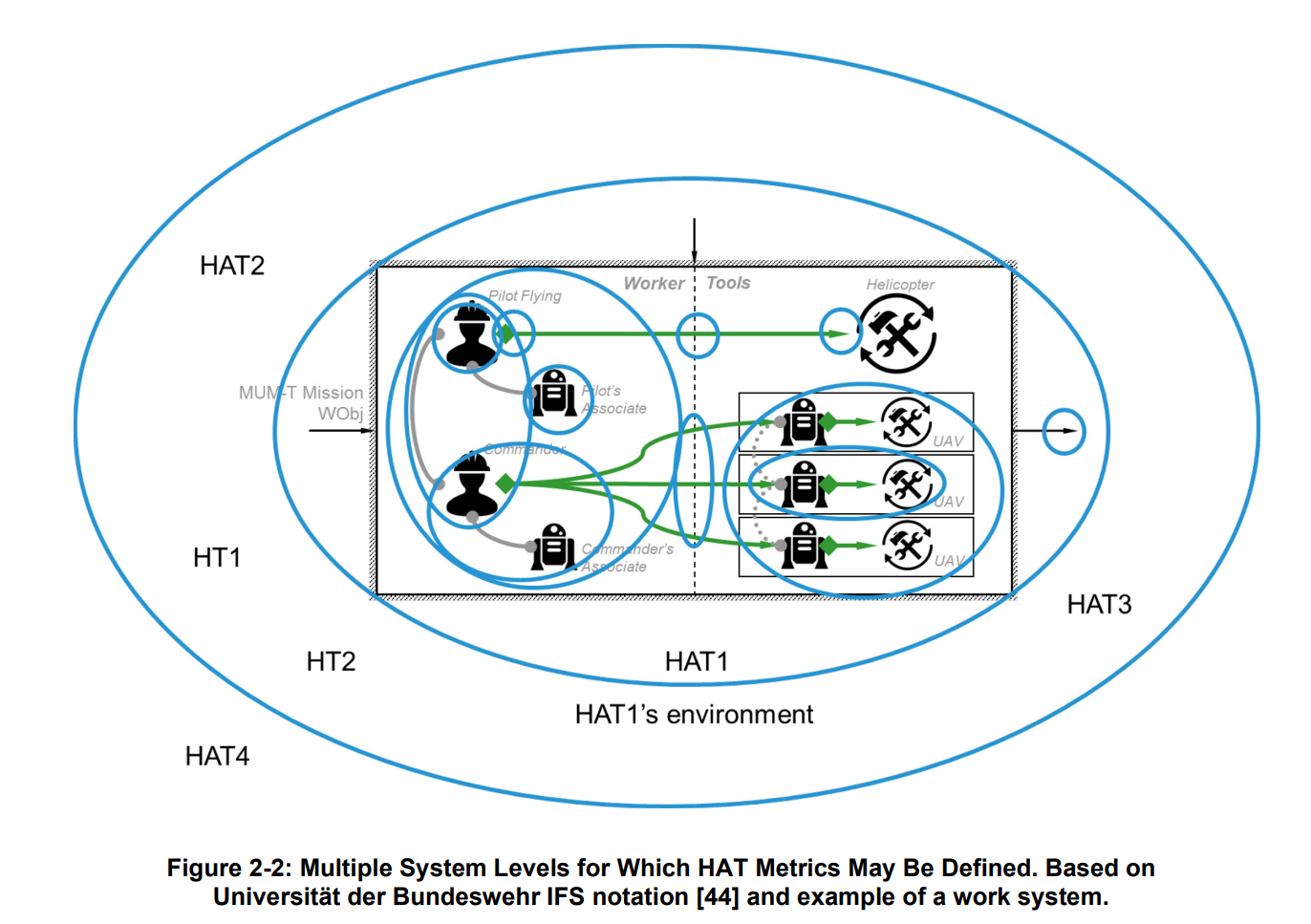
该RTG还通过对HAT设计模式的新探索,解决了将HAT解决方案从一个应用推广到另一个应用的实际困难。设计模式的应用已被证明在人机交互和软件工程领域是成功的,因此该小组研究了在HAT应用中利用这一概念的可能性,即提供一个共同的结构和词汇来联系彼此的HAT工件。这份报告记录了描述高度自动化人机系统的术语的标准化,以及在HAT应用中面临的顶级重复出现的问题,然后提出了一些可能作为设计模式实例的候选HAT解决方案。在对这种方法的效用做出最终判断之前,这种有希望的努力需要更多的研究。然而,本报告描述了最初的动机和采取的方法,以及一些候选模式,以便继续进行更严格的评估。
进一步研究方向
HFM-247成功地解决了各种重要问题,如就共同的系统级框架模式方法达成一致,HAT性能指标,以及关注对话管理、工作协议、透明度和明确的意图沟通的可能解决方案。通过TAs,RTG还集中于识别和展示成功的HAT应用、方法论和HAT的设计实践。然而,这一领域是复杂的,在北约的各种应用中实现真正的HAT之前,仍有重大挑战需要克服。正如报告中进一步讨论的那样,建议进一步关注和发展以下研究领域:
1)有意义的人类控制:如何在所有人工智能系统中建立和维持。
2)动态演化行为的编队协作设计模式。
3)持续的信任-校准,以适当地依赖自动化。
- 扩大范围以涵盖所有相关的团队结构和特征
5)人类-智能体团队工作中的可解释人工智能;
6)通过共同学习进化混合智能。