
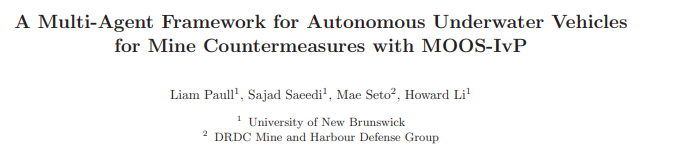
本研究提出了一个基于 MOOS-IvP 中间件的自主水下航行器控制算法构建框架。侧扫声纳传感器(SSS)通常用于生成声纳图像,在图像中可以识别类似地雷的物体。这里实施的基站社区可维护 SSS 的覆盖置信度地图,并为用户提供二维和三维模拟以及实施高级控制方案的能力。开发可分三个阶段进行: 1) 最简配置,仅使用必要的应用程序来开发和测试外环控制;2) 包含模拟硬件的配置;3) 包含实际硬件的配置,该配置应从第 2 阶段平滑、轻松地扩展而来。这样做的好处是使用方便、开发速度更快、减少硬件测试和成本。
图 1. 自动潜航器路径及其侧视声纳覆盖的相应区域示例。
多智能体框架
在拟议的 MAS 框架中,每个 AUV 和基站分别有一个独立的社区。每个群落上都运行着几个应用程序,其中一些包含在 MOOS-IvP 发行版中,另一些则由作者自行开发。
在拟议框架中,有三种可能的配置:1) 加速开发高级控制和规划策略的简约配置;2) 在最底层用变量替代实际传感器和执行器数据的模拟配置[12];3) 实际硬件实施。
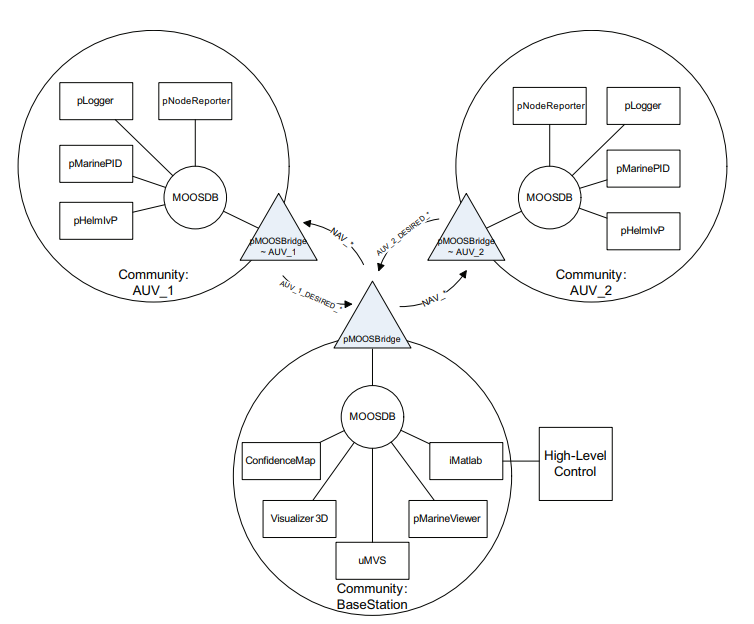
图 6. 配置 1:2 个自动潜航器群落和 1 个基站群落,应用极少。
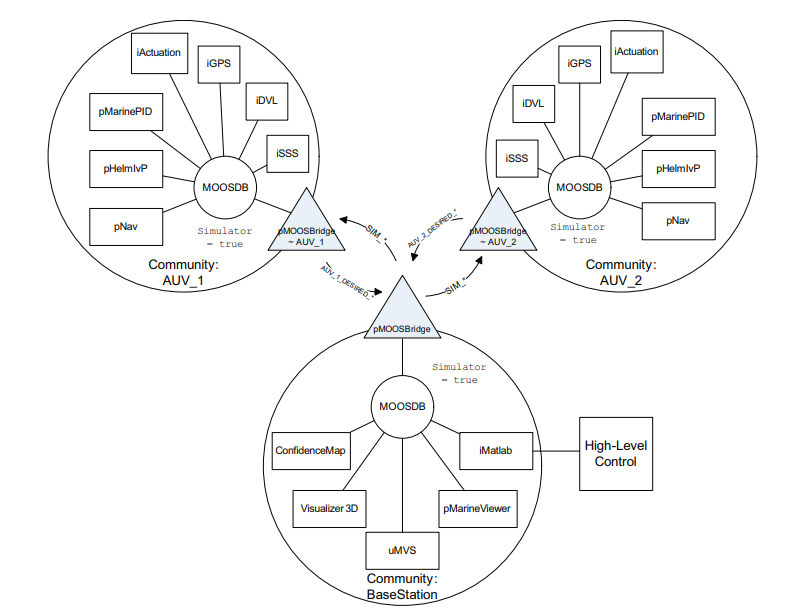
图 8. 配置 2:硬件模拟包括所有传感器和致动器应用。
成为VIP会员查看完整内容
相关内容

Arxiv
42+阅读 · 2023年4月19日
Arxiv
224+阅读 · 2023年4月7日
相关VIP内容
相关资讯
相关论文
Arxiv
42+阅读 · 2023年4月19日
Arxiv
224+阅读 · 2023年4月7日