
多智能体搜索与任务分配(MASTA)应用广泛,包括搜索与救援、生态监测与采样、军事应用等。在设计这类系统时遇到的相当大的困难是缺乏分析建模工具,这就要求研究人员和工程师依赖计算机建模与仿真(M&S)。虽然 M&S 是一种非凡而重要的工具,但它往往不容易被人类洞察,可能需要大量的时间和精力,而且往往无法快速做出决策。本论文介绍了 MASTA 的分析模型,并将其与作为基线的 MASTA 计算机实施进行了比较。分析模型的预演误差在百分之几以内,并能更深入地了解系统行为和参数之间的相互作用。该模型可缩短 MASTA 系统的设计时间,并通过快速决策对此类系统进行更好的控制。
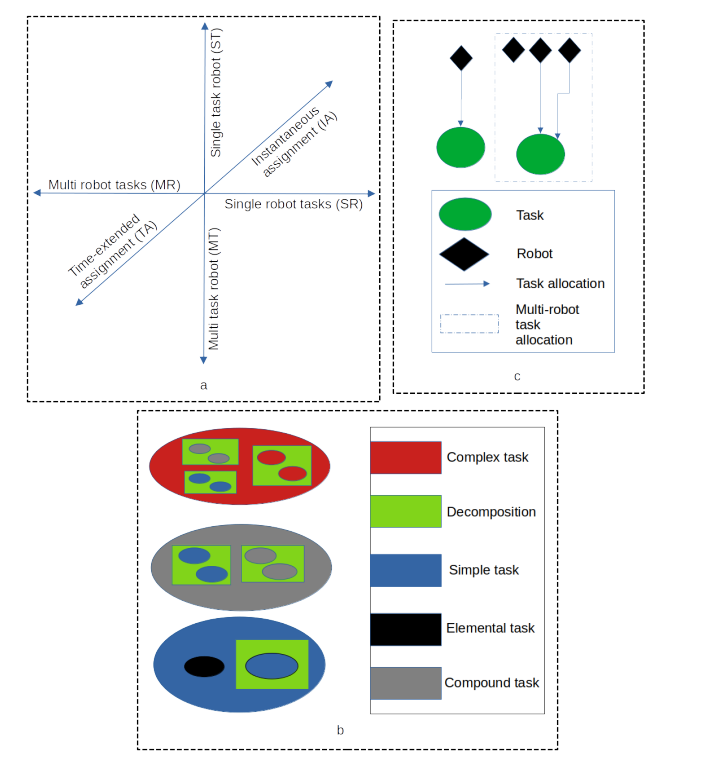
图 1:a) [15] 分类法中的三个维度:第一,可由一个机器人解决的任务 (SR) 与需要多个机器人解决的任务 (MR);第二,只能同时解决一个任务的机器人 (ST) 与同时解决多个任务的机器人 (MT)。第三,不考虑未来分配的瞬时分配与可获得足够信息从而需要考虑未来分配的最优分配的时间扩展分配。 b) [46] 所描述的任务类型,以及 c) 多机器人任务分配。
引言
多机器人任务分配(MRTA)涉及由多个机器人组成的系统,而这些机器人往往无法独立完成任务。它可以被视为一个最优分配问题。[20]. 这个问题通常很复杂,而且通常是 NP 难问题[21]。 因此,人们开发了许多不同的方法。其中最受欢迎的分散式多智能体系统是基于市场的方法。在单项拍卖中,一个智能体将开始拍卖一项任务,其他智能体将根据自己的效用出价,拍卖者将选择获胜者。我们感兴趣的是需要搜索任务并分配任务的系统,因此我们将搜索和任务分配结合起来。在实际系统中,通信半径和探测任务的能力是有限的,而且成本可能过高,尤其是在水下。我们建议将简单、廉价的智能体自适应地组合起来,以创建能够进行较远距离通信和任务检测的移动相控阵。我们将这些智能体称为组成体,因为它们共同组成了一个嚎叫智能体(复合体)。据我们所知,以前的文献中还没有探讨过这种组成智能体的想法。合成智能体的最佳形成是一个复杂的问题,因为它会影响搜索、通信和任务分配性能。如果能开发出有效的方法来组建复合智能体并使之相互作用,就能让一大批简单的机器人承担起昂贵得多的设备的任务。
研究人员对带有检索约束条件的搜索和检索的动态任务分配进行了研究。检索对象是通过搜索一组位置找到的,每个机器人都能做到这一点。对象与类型相关联;在搜索和检索之前,会创建一个列表,列出每种类型的任务何时可以相互交付。例如,对于红色和蓝色类型,给定一个列表 {红、蓝、红、红},找到的任何红色或蓝色物体都能满足要求,但只能按照指定的顺序进行。首先,开发了一种扩展的顺序单项拍卖,并与隐式协调(共识控制)方法进行了比较。他们发现,共识控制能更快地完成所有任务,但智能体在拍卖方法下的移动速度较慢。
一个潜在的应用领域是水下任务,在这种任务中,通信和导航的成本过高;自主水下航行器(AUV)的价格高达十几万美元。研究人员[13]提出了一种方法,利用水听器,一个昂贵的水下机器人可以引导一群较简单的廉价机器人。智能体通过发射频率的多普勒频移来估计相对航向,通过振幅来估计距离。组成相控阵列的智能体或许可以充当领航员,与更靠近水面的飞行器进行通信,以进行导航。
动物界也有智能体聚集在一起,发出更强的信号。例如,萤火虫(雷虫、闪电虫)在交配季节会用生物发光相互吸引。当萤火虫聚集在一起时,它们的发光强度会增加,从而吸引更远处的萤火虫。因此,某些萤火虫物种会同步发光,数百只萤火虫一起以恒定的频率照亮树木,中间则是完全的黑暗[19]。
论文目的
论文旨在对智能体搜索和任务分配在一系列参数(如智能体数量、探测半径、任务数量等)下的性能进行数学建模。这些模型旨在加深对 MASTA 系统的理解,减少设计时间和计算需求。此外,数学模型还有助于设计和开发 MASTA 控制器。我们的目标是回答以下研究问题:
1.是否有可能对 MASTA 系统进行数学建模?
2.这些模型是否能加深对 MASTA 的理解?
3.这些模型是否减少了计算需求?
提纲
第 2 节介绍了背景材料,包括论文相关领域的简短概述。第 3 节介绍了实施的计算机模型和软件。第 4 节包含实验和结果分析。第 5 节讨论第 4 节的结果。最后,在第 6 节中得出结论,并提出今后工作的设想。

