
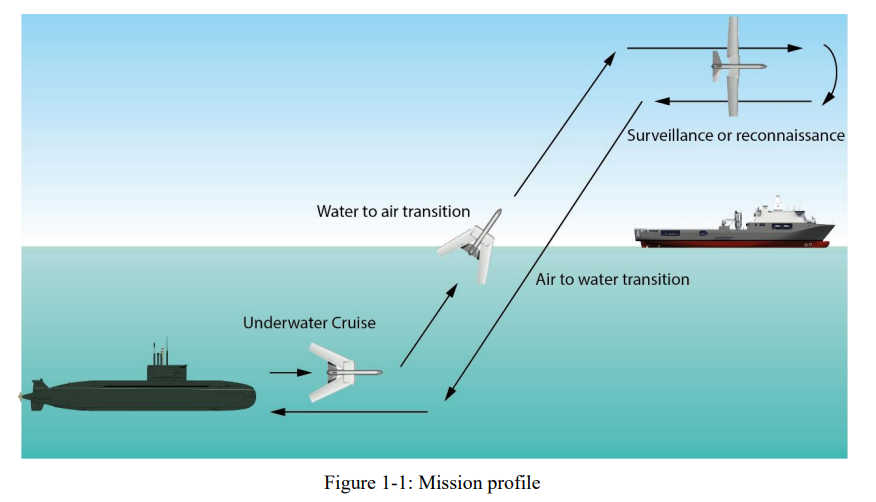
无需上浮即可执行水下及沿岸区域监测任务的能力将提升潜艇的安全性和作战能力。本文提出了一种创新型双模态无人水下/空中系统(BUUAS)及其作战概念(CONOPS),旨在降低潜艇暴露风险。该系统的运行流程为:首先由水下潜艇释放BUUAS,使其在水下航行以保持与潜艇的安全距离;随后通过创新型推进系统实现从水下到空中的介质跨越,执行既定空中任务;任务完成后,BUUAS将重新潜入水中并巡航返回母艇进行回收。
本研究致力于设计与开发可实现上述作战概念的系统。项目重点突破三大核心问题:i) 兼顾气动与水动性能的优化构型研究,ii) 水/空介质高效过渡技术探索,iii) 水/空混合推进系统设计。为实现水空双域高效运行,采用配备新型机翼展开机构的变后掠翼构型。通过数值模拟、水洞及风洞实验测试,评估了推进装置的水中推进性能与空中的气动特性。测试数据验证了双模态载具构型的可行性,稳定性分析表明该系统在飞行过程中具备静动态稳定特性。采用高压CO₂驱动的喷水过渡推进系统可实现快速水空转换起飞。初步设计包含基于高精度数值模拟校准的解析模型进行系统参数标定,以及推进装置专用气体释放机构设计。通过推力和发射实验验证了过渡推进系统的设计结果及适用性。定制化紧凑型混合推进系统的空/水实验结果表明,其可为空中飞行与水下巡航提供充足动力。
成为VIP会员查看完整内容
相关内容

Arxiv
37+阅读 · 2023年4月19日
Arxiv
203+阅读 · 2023年4月7日
Arxiv
138+阅读 · 2023年3月29日

相关VIP内容
相关资讯
相关论文
Arxiv
37+阅读 · 2023年4月19日
Arxiv
203+阅读 · 2023年4月7日
Arxiv
138+阅读 · 2023年3月29日