
本科学报告介绍了加拿大国防研究与发展(DRDC)和美国陆军作战能力发展司令部指挥、控制、通信、计算机、网络、情报、监视和侦察(C5ISR)研究与技术集成(DEVCOM C5ISR RTI)在调查无人驾驶飞行器(UAV)电磁辐射方面所做的加拿大(CAN)-美国(USA)联合工作。这项研究的目的是量化这些辐射,并确定在无人飞行器上部署电磁传感器作为有效载荷可能面临的工程挑战。为此,我们选择了几种现成的商用系统和/或组件,并将其与一种实验仪器结合使用,该仪器设计用于记录 100 kHz 至 4 MHz 频率范围内的电磁噪声。使用两个独立的实验装置对 12 个不同的系统进行了测试。选择这些系统的依据不仅有可用性,还有外形尺寸(旋转翼和有翼)和燃料类型(电动电池、甲烷和汽油)。12 个无人机系统的电磁辐射首先在系统层面(即系统整体)进行采集。完成这项工作后,又进行了更深入的组件级分析,以确定无人机组件的噪声特性。结果表明,所有电池供电的无人机都会在整个相关频段内发出噪声,而且不同无人机之间的噪声差别很大。组件级分析表明,电机链产生了其中一种无人机(Stingray)的大部分(如果不是全部的话)观测到的辐射,这很可能可以推广到其他无人机系统。这是由于驱动无人机电机需要较大的调制电流。由于电池供电系统易于操作而受到青睐,因此必须开展进一步的工作,以确保可能作为有效载荷部署的传感器符合电磁标准。
在无人驾驶飞行器上部署和控制传感器技术作为有效载荷的能力,可以显著增加操作员与潜在威胁之间的距离。这种距离的增加可大大降低操作员和其他军事资产面临的潜在风险。然而,在传感器与潜在的无人飞行器集成之前,必须对电磁辐射进行分析,以确定潜在的干扰和集成问题。
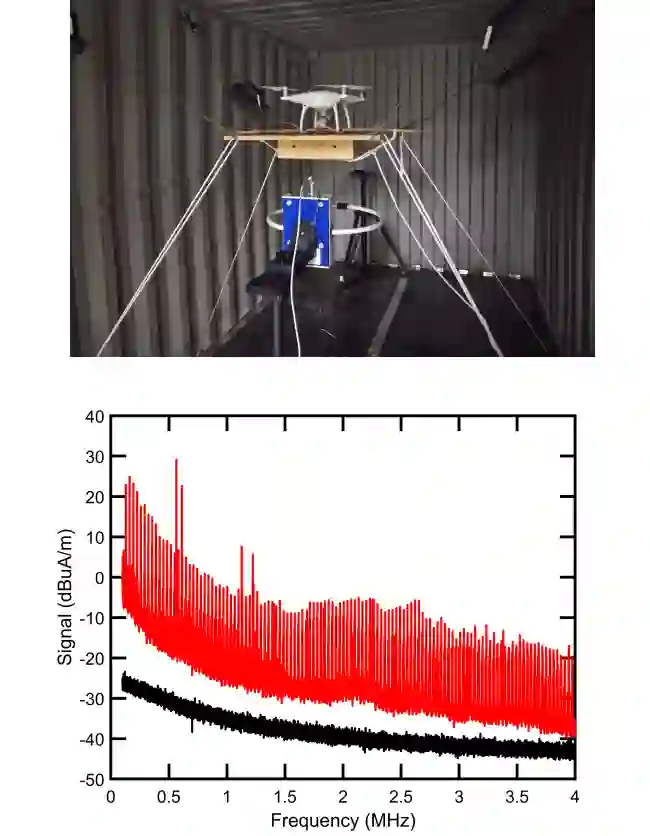
图 2:DJI Phantom 4 Pro 的电磁辐射。图中展示了无人机测试时的照片(上图)和测量到的辐射(下图)。测量到的辐射(红色)与背景噪声(黑色)相对照。在随后对电池供电系统的测量中也观察到,电磁辐射通常由一系列紧密间隔的峰值组成,在整个频谱带宽上高于背景。例如,这会对某些传感器有效载荷造成干扰。

