
今天,在自动化、机器人、多传感器感知和人工智能(AI)的技术进步以及数字化和连接的推动下,海事领域正处于一个新时代的边缘。智能船舶基础设施和技术、远程控制和自主船舶操作以提高安全、安保、成本效率和可持续性是海运的未来[1],现在代表了全球贸易的90%的引擎[2]。船舶将很快受益于传感器、电信和计算技术的最新发展,将智能航运革命变为现实[3]和[4],正如无人驾驶汽车、空中无人机、无人驾驶(或远程驾驶)飞机和水下航行器等自主平台已经发生的那样。
I. 智能海事系统的未来
跨越船舶和港口的下一代智能海事系统将使海事作业达到最高水平的关键安全、安保和效率。随着海上作业技术的发展,更多的数据可以被采集、分析和处理,以更好地优化系统。用于数据传输的全球网络与物联网范式相结合,将有助于提供基于岸上控制的智能船舶。随着时间的推移,船舶和港口将变得越来越智能,能够进行更先进的自主操作。
最近启动了几个项目来探索自主船舶的技术、经济和法律可行性,例如,欧盟资助的通过网络智能的海上无人导航(MUNIN)项目[5]、高级自主水运应用(AAWA)项目[3]、自主水面航行器的传感器融合和避撞(AUTOSEA)项目[6]以及YARA Birkeland示范机[7]。国际海事组织(IMO)最近为海上自主水面舰艇(MASS)确定了四个级别的自主性[8],从具有自动程序和决策支持的舰艇、有无船员的遥控舰艇到完全自主系统。据估计,75%-96%的航运事故涉及人为错误[2]。通过更好地利用数据和分析,这些事故可以被预防,或者将其影响降到最低。船舶正在成为复杂的传感器中心和数据生成器。下一代船舶与岸上的连接和海事作业中 "大数据 "的引入将改善实时数据处理和作业效率,使远程操作人员能够做出数据驱动的决策。
对智能船舶的远程控制和自主操作发展至关重要的是其通过多种数据源感知周围环境并实时交流信息的能力,以便安全地航行到预设的目的地,执行复杂的机动操作,并避免沿途发生碰撞或其他事故[3]。然后,传感器数据处理应与智能导航和态势感知系统无缝集成,以通过数据融合,保持船舶眼前或预测环境的详细和不断更新的态势图,这一视角也可以用背景信息来增强,如历史数据、天气预报和电子海图。此外,对船舶运动预测的研究将提供先进的能力,以预测船舶的运动状态到未来,预测范围为数小时[9]。
船上的指挥和控制系统以及当局的监视系统将需要整合多种信息来源,包括来自沿海雷达、远程识别和跟踪、船舶交通管理系统以及船舶交通监测和信息系统的传统监视数据。这些数据将越来越多地与广泛使用的自动识别系统(AIS)报告相结合,以及通过合成孔径雷达和光学数据提供额外的广域监视的卫星图像。这种多传感器感知系统将提供更好的手段来监测和分析活动、事件和威胁,使发展增强的海洋态势感知具有更高的准确性、及时性和更广泛的自动化功能。
监视人员通常必须监测海上的情况,并预测来自广泛海域内大量船只的新出现的危难情况。由于海事数据的复杂性、数量和异质性,这可能成为一项非常苛刻的任务。下一代态势感知系统将通过合并传感技术和历史模式,将人工智能应用于监控数据,通过预测分析获得实时洞察力,并改善现场和加班的战略决策。大数据和人工智能驱动的数据融合可以改善异常检测[10],帮助检测和评估所有构成潜在威胁的突发事件,如船只进入禁区、漂移和偏离常规路线,或参与非法活动,例如毒品走私、海盗、人口贩运和非法捕鱼。
II. 潜在的风险和挑战
虽然上述技术的出现为海事部门带来了巨大的机遇,但也带来了不同的挑战和潜在的阻碍,需要加以考虑。首先,新技术需要在不同的操作情况下具有强大的安全性和保障性,目的是进一步减少海上伤亡和事故的数量。为此,必须确保MASS的监管框架与快速发展的技术发展保持同步[4]。这可能是推出完全自主操作的最大障碍之一。与航运有关的法规仍然是基于船上有船员的原则,这意味着其中的一些法规需要为远程和无人操作进行更新[11]。
考虑到不断提高的自主性水平、各种数据源和所涉及的系统,自动态势感知系统将需要无缝结合来自多传感器感知系统的可用信息,以产生对船舶周围环境的一致理解。为了确保这项技术的成功,有必要解决传感器之间的冲突,并在模糊不清的情况下解释和支持决策。探测和分类能力必须是可靠的,甚至对小物体也是如此,并通过包括例如光学和红外摄像机以及激光雷达来提供更好的近距离部门的覆盖。这个领域的困难之一是,虽然一些传统的传感器,如全球导航卫星系统(GNSS)和AIS有完善的数据标准,但对于其他类型的传感器,如激光雷达和照相机,数据标准并没有那么完善。还值得指出的是,目前大多数可用的传感器不是为支持自主性而建立的,因为它们的数据频率不够高,无法满足自主系统所需的实时决策。此外,船舶自主性的提高还需要遵守海上防撞规则[《国际海上避碰规则公约》(COLREGs)][12]。
鉴于最近人工智能作为自动决策系统的关键技术所取得的进展,这些技术仍在发展,并需要进一步发展,以确保完全自主操作既现实又安全。一个主要的挑战来自于影响人工智能技术的可靠性、避免故障或失灵以及可解释性方面的各种漏洞[13]。这些漏洞可能会强烈影响当前系统的稳健性,导致它们进入不受控制的行为,并允许潜在的对手欺骗算法以获得自己的利益。人工智能驱动的系统的稳健性源于人工智能方法的泛化能力,通常可以通过使用大规模的训练数据来提高。然而,在海洋场景中,这可能是有问题的,因为数据的类型和规模在很大程度上是不同的,这就要求海洋研究界开发一种改进的多模态数据的融合,或者对不同类型的数据使用各种人工智能方法[4]。人工智能系统的另一个挑战是更好地理解哪些任务可以利用在线学习的能力来实际执行,在这种情况下,传感器数据会被实时处理,通常用于学习动态和预测模型,或者用于完善之前学到的模型。另一方面,离线学习需要预定的训练数据,特别适用于识别和分类任务。标准人工智能方法的另一个问题是,它们不能提供预测的不确定性估计,因此通常不能对预测输出的可信度进行量化。鉴于海事监控应用的安全关键性,未来的态势感知系统将需要对预测的不确定性进行可靠的量化,以实现改进的决策。
此外,由于未来智能船舶的连接性越来越强,网络安全是一个重要问题。网络攻击者可以利用通信链路、人机界面和一些软件支持的功能中不断增加的漏洞,直接对数据和控制系统的完整性或可用性发起攻击[14]。此外,自我报告的传感器数据,如AIS报告,可能会受到故意报告虚假信息或欺骗的影响,船只只需关闭其AIS发射器就可以变黑[15]。GNSS可以为自主或远程控制的船舶提供定位、导航和定时(PNT)服务。不仅要确保PNT数据的准确性,而且要确保PNT数据的完整性和运行的连续性,这对海上安全来说越来越关键。GNSS在来自多个来源的海事传感器数据的时间戳以及电信和计算机网络的关键时间同步方面发挥着关键作用。然而,GNSS很容易受到干扰和欺骗性攻击,这些攻击可能诱使受害船舶与攻击者的信号而不是合法的卫星同步,对船舶的监测和控制功能产生负面影响,甚至使其失效。
自主船舶将包括具有先进的船上传感器的复杂自动化系统。然而,如果在开放水域发生问题,有可能从陆上控制中心远程操作船只,这可能是有用的,而且是必要的。这需要特定的人机界面和互动,以实现数据和状态的可视化、情况意识、远程操作和远程指导,这对保持安全运行至关重要。实现自主操作的创新可能会遵循一个渐进的方法。第一步可能集中在基于情境意识系统的新型决策支持系统,并有适当的多传感器集成。这种系统将提供基本水平的自主能力,以便在不同的操作场景中加强观察和自我引导。下一步是寻找发展机会,以扩大或扩展到更多的自主功能。一些现有的技术预计将被扩展和发展,以释放更多的功能,而其他能力,例如卫星数据处理,不一定会引起新的挑战,而是被应用或结合起来。
III. 案例研究:自动异常检测的进展
根据欧洲海事安全局(EMSA)的数据,在2014-2019年期间,在欧盟成员国范围内,共报告了19 418起海上事故,涉及船舶总数21 392艘,造成496人死亡,这些最后主要发生在碰撞、洪水/沉船和搁浅期间[16]。最近的重大现实事故的例子包括涉及商业和海军船只的致命碰撞,如美国海军的菲茨杰拉德号,美国海军的约翰-S-麦凯恩号,集装箱船德尔菲斯-格但斯克号和货船BBC海王星号在大贝尔特海峡的碰撞;当然还有苏伊士运河的埃弗拉-盖文号搁浅。这类事故的主要原因通常仍然是能见度低,舰桥小组行动不及时,以及岸上没有对碰撞/搁浅的风险发出警告。有了下一代异常检测系统提供的实时改进的海上形势图,这些情况可以被自动检测出来,并启动适当的应对措施。
基于监视系统提供的船舶运动学数据的创新统计表示,最近在自动海上异常检测方面的进展[15], [17], [18]为揭示船舶的异常行为和意外模式提供了可能性。在这种情况下,自动异常检测工具已成功应用于2021年集装箱船Ever Given[19]的真实世界重大事件,该船于3月23日在苏伊士运河搁浅(见图1)。据估计,该堵塞事件每天影响96亿美元的货物,或约占世界贸易总额的12%[2]。异常检测器被设计用来处理可用的报告序列,如AIS数据、来自地面或卫星雷达系统的信息(如果有的话),以及定义预期的航行名义行为的上下文信息,以决定是否在特定的时间段内发生了偏离名义行为的情况,例如,两个连续数据点。基于Ever Given号记录的AIS数据的结果显示,拟议的自动异常检测器可以在搁浅前整整19分钟被触发,并对异常行为发出警报。这显然可以帮助避免对海上交通和全球贸易造成如此负面影响的事故。
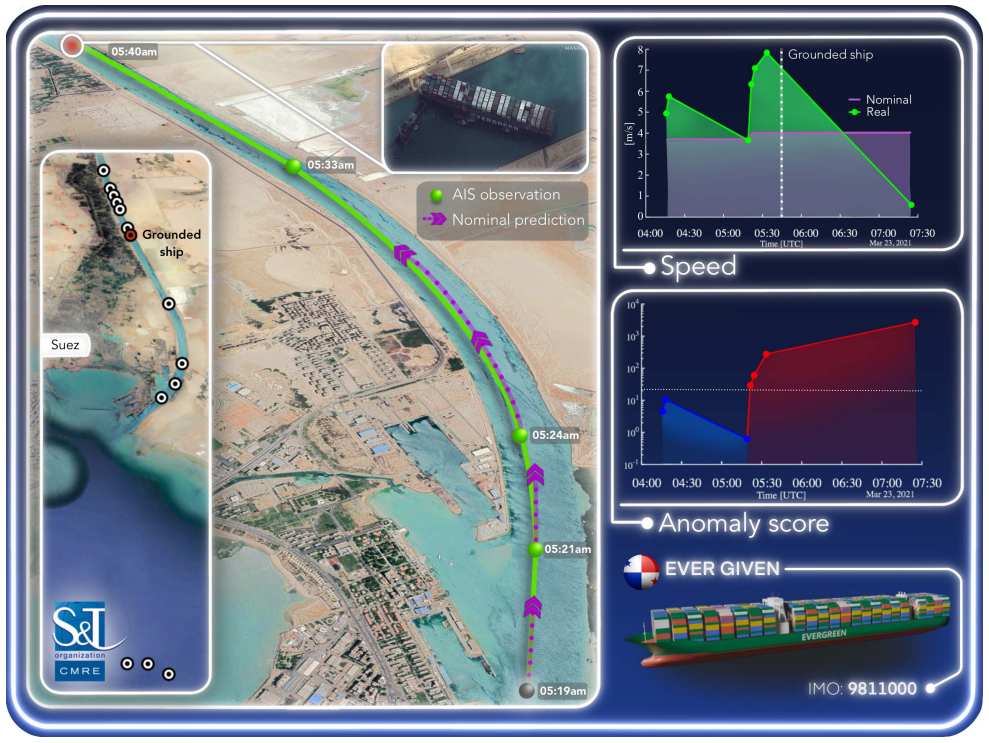
图 1. 应用于苏伊士运河堵塞真实场景的自动异常检测工具概述 [19]。左侧显示了 AIS 从 23-03-21 到 29-03-21 报告的 Ever Given 轨迹。在中间面板中,标称轨迹和 AIS 观测值描绘在运河入口之后和搁浅之前。在右侧面板上,报告了异常分数以及船舶的标称速度和实际速度。当分数高于阈值(白色虚线)时触发警报(红点),而当分数低于阈值时声明标称条件(蓝点)。
尽管最近出现了一些颠覆性的技术,但要形成一个清晰的海洋态势图,需要复杂的自动信息处理。自动驾驶汽车和其他自主系统的进展表明,有了先进的传感器技术和精心设计的算法,就有可能提高对形势的认识和自主性。这些创新技术,加上一定程度的人机/人系统互动和人工智能支持的协作,可能是减少海上人为错误造成的事故的关键。埃弗拉的重大事件揭示了下一代自动异常检测系统在增强船员感知方面的关键作用,并为未来船舶的远程支持和自主控制提供了一条通往高级态势感知的新途径。
