
准确的轨迹和目标定位是为决策者提供执行任务信心的关键。越来越多的不同情报来源的多种情报、监视和侦察(ISR)资产被用来提高跟踪定位的准确性,因此需要开发利用异质传感器数据流的方法,以更好地估计目标状态。常用于目标状态估计的算法之一是卡尔曼滤波(KF)算法。如果其协方差矩阵是对传感器测量的不确定性的准确近似,该算法表现良好。此研究补充了美国海军正在进行的人工智能/机器学习(AI/ML)工作,定量评估了使用ML模型预测传感器测量噪声进行KF状态估计的潜力。使用计算机模拟来生成单个目标的传感器轨迹,并训练一个神经网络来预测传感器的误差。混合模型(ML-KF)能够在目标位置估计中比使用归一化传感器误差的基线KF模型的性能好大约20%。进一步研究用外部环境变量作为输入来增强ML模型,有可能创建一个能够在不同环境下运行的自适应状态估计系统。
处理和利用多种情报数据流的能力对于实现卓越的战斗空间态势至关重要。美国海军,特别是海军信息部队(NAVIFOR),正在探索人工智能(AI)/机器学习(ML)技术的有效性,以协助数据融合并提供快速和及时的共同作战图像(COP)/共同战术图像(CTP)分析。一个重点领域是过滤来自不同传感器系统的数据,以提供对战斗空间中目标的改进的状态估计。这是一项关键任务,因为准确的跟踪和瞄准是为决策者提供执行任务信心的关键。
本论文旨在评估整合人工智能/ML算法和技术的可行性,以过滤异质数据集,提高开发COP/CTP时的轨迹估计的准确性。卡尔曼滤波法(KF)及其变种经常被用来估计战斗空间中目标的位置。然而,估计的准确性会受到外部条件变化和对目标假设的违反的极大影响。
Gao等人(2020年)、Jouaber等人(2021年)和Ullah等人(2019年和2020年)的研究表明,在标准KF中集成一个学习模块,以提高状态估计的准确性。这项研究使用一个神经网络(NN)来学习与传感器测量相关的测量不确定性的变异性。这些变异性的存在是由于外部因素的变化,如天气状况,这些因素并没有直接作为KF算法的状态模型。这有可能提高我们的COP/CTP,特别是当外部因素动态地影响我们的传感器融合系统时。
我们使用一种定量的方法来评估选定的人工智能/ML算法在过滤目标位置数据集方面的准确性。我们假设,在KF模型中加入学习模块将超过标准的KF模型,并对目标位置提供更好的估计。为此,我们设计了一个三阶段的数据管道(图1)。
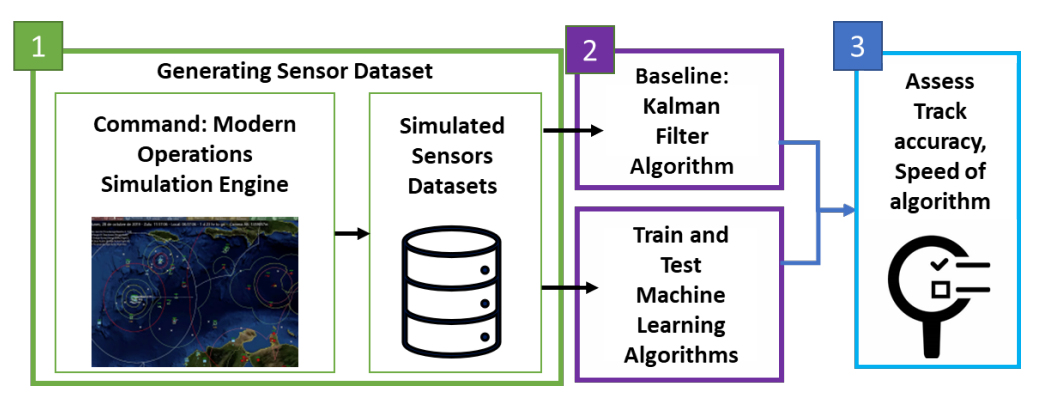
图 1. 评估跟踪过滤算法的方法。
首先,使用模拟软件生成传感器数据--Command。现代行动(CMO)由Matrix Games(Matrix Games, 2022b)开发。使用了一个由来自不同情报领域的多个对峙传感器和一个单一目标组成的场景。第二,开发了两套模型--使用KF算法的标准基线模型,以及使用嵌入KF算法的神经网络的另一套模型(我们称之为ML-KF模型)。这个神经网络是一个在训练数据集上训练的学习模块,用来估计KF的传感器测量噪声。我们在可能的不同超参数中进行超参数搜索,以提高每个传感器的ML模型的性能。在最后阶段,两个模型的性能被评估为估计目标状态位置的准确性。
我们的研究结果表明,整合ML模型来估计标准KF算法的传感器测量误差矩阵,可以显著提高目标状态估计的准确性,在5%的置信度下约为20%。综上所述,我们的贡献有以下几点。
-
我们开发了一个ML操作管道,从模拟中摄取数据来训练、验证和测试机器学习模块,以便随后部署在KF系统中。该方法、数据集和生成的模型是可重现和可复制的,因为用于该开发的代码库和框架是完全开源的。
-
我们已经证明,嵌入标准KF算法的学习模块可以比标准KF模型改善状态估计。ML-KF模型能够产生一个传感器测量误差矩阵来更新KF算法对传感器测量的概率信念,从而改善KF的估计。
-
我们之所以能够训练KF模型中使用的学习模块,只是因为我们的仿真系统提供了一个实战范围可能无法提供的地面真实目标状态。这证明了使用模拟来开发ML模型并随后将其部署在现场的潜力。
我们的研究使用ML模型来预测标准KF算法的传感器测量误差。我们的ML-KF模型能够在5%的置信度下明显优于我们的基线模型,表明使用ML-KF模型将改善目标位置状态估计的性能,缓解了异质传感器数据流中不存在传感器测量的不确定性时的性能问题。换句话说,在没有传感器数据的不确定性测量时,嵌入KF的ML能够预测不确定性并动态更新KF算法的参数。
这个概念验证有可能使用更复杂的方法进一步扩展。我们提出了未来研究的三个关键领域。1)通过包括在KF中没有直接建模或使用的其他参数(如战斗空间的天气状况),来提高ML-KF模型的可推广性。2)使用时间序列方法对目标的时间运动进行建模,从而提高嵌入KF中的学习模块的预测能力。3)使用ML模型进行多目标数据过滤(JDL 2级),通过包括分类任务来对跟踪数据进行分类。
随着国防部越来越多地将重点转移到ML的应用上,我们认为,这种在数据过滤中的应用将能够增强现有的数据过滤方法,并消除替换这些方法的费用。例如,通过增强现有的COP/CTP数据过滤算法,我们将能够对目标进行更准确的状态估计,从而对目标在COP/CTP中的位置提供更高的信心。这种ML-KF模型摄取异质数据流的能力也是一个强大的工具,可以使情报分析员的工作自动化,他们经常需要在不同的情报领域交叉参考他们的来源。通过改进我们的作战人员可用的成套工具,他们在应对任何对手时将更具杀伤力。


