报告主题: Timeline-based Planning: Theory and Practice
简介:
规划系统通常是围绕状态和动作的概念构建的,它们继承自STRIPS,是PDDL等建模语言的核心。基于时间轴的问题从不同的角度规划的方法:没有明确的分离状态,行动和目标,而是计划域表示为一个系统是独立的,但互动,组件,行为随着时间的推移,表示为时间轴,是由一组给定的时间约束。这一模式产生于空间行动计划和调度的背景下,在过去二十年中被用于许多复杂的场景,从空间探索任务的短期规划到长期规划,再到航天器的机载自主。最近,该领域的研究探索了该范式在辅助机器人等不同场景中的应用,并解决了关于基于时间线的问题和语言的理论和计算特性的长期问题。
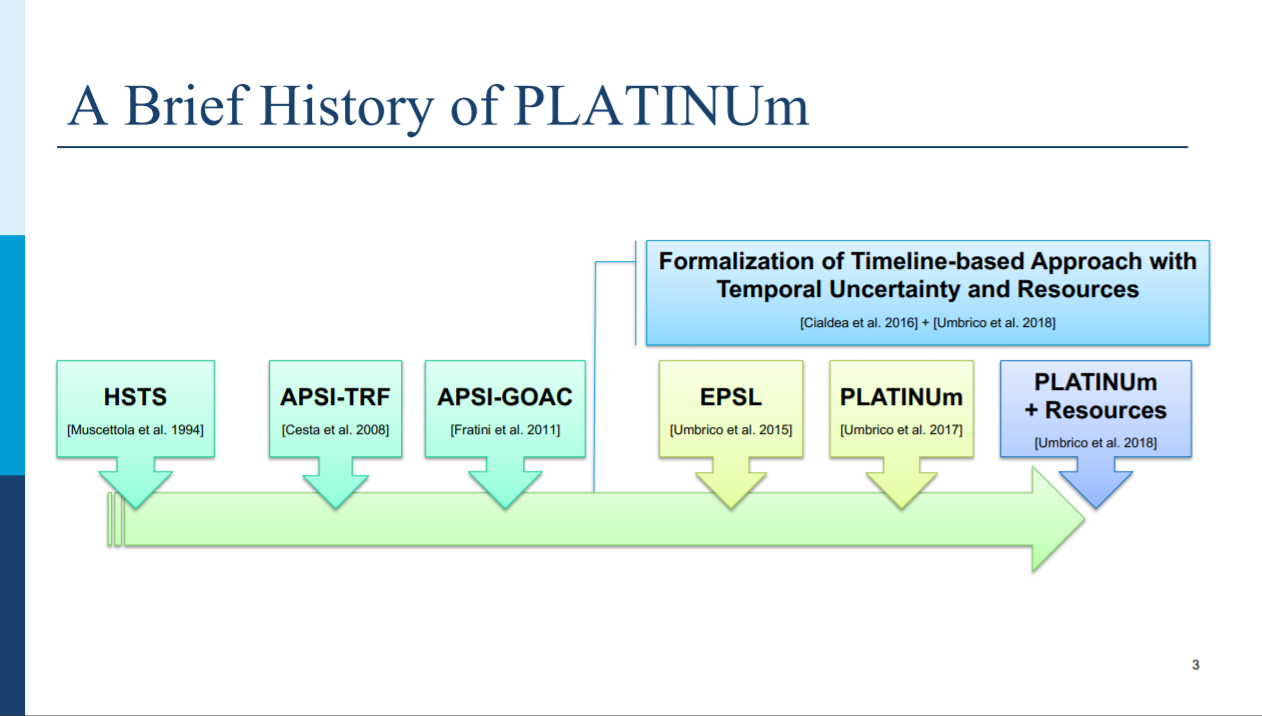
本教程介绍了基于时间轴的规划方法。在简要回顾了该方法的发展历史之后,将其与常见的基于行动的规划形式主义(如PDDL)进行了比较。然后,详细描述了该领域的理论和应用的最新发展以及研究的挑战。最近引入的PLATINUm框架被描述为一类基于时间轴的规划系统的代表,并详细描述了最近关于基于时间轴的语言的表达性和基于时间轴的问题的计算复杂性的理论结果。
邀请嘉宾:
Nicola Gigante ,乌迪内大学的博士后研究员,从事由Carla Pi-azza教授领导的EN-CASE项目。主要研究方向:人工智能中的时间控制、计算机科学中的逻辑、形式方法。
Angelo Montanari是乌迪内大学副校长、欧洲理论计算机科学协会(EATCS)意大利分会主席、计算机科学教授、数据科学与自动验证实验室主任。研究兴趣为计算机科学中的逻辑(时间逻辑、模态逻辑、自动机理论、博弈论)、形式化方法(反应系统的逻辑规范和验证、模型检查、综合)、数据库(时态数据库、空间数据库、时空数据库、XML数据库)、人工智能(关于行动和变化的知识表示、规划、推理)。
Andrea Orlandini是罗马认知科学与技术研究所(ISTC-CNR)的一名研究员。他的主要研究方向是自动化规划和基于模型的机器人控制。他在法国图卢兹国家科学研究中心(CNRS)的系统分析与体系结构实验室(LAAS)获得博士后学位。自主空间飞行器的故障检测、隔离和恢复(FDIR)控制问题是他的主要工作重点。他参与了自主通用架构:测试和应用(AGATA)项目(与CNES、ONERA和CNRS合作的一个项目),研究空间卫星控制架构。
Alessandro Umbrico是ISTC-CNR的研究助理。2012年5月,他以ISTC开发的基于时间轴的计划和调度系统的论文,获得了罗马特雷大学计算机科学工程硕士学位。他目前正在参与EasyReach项目。