
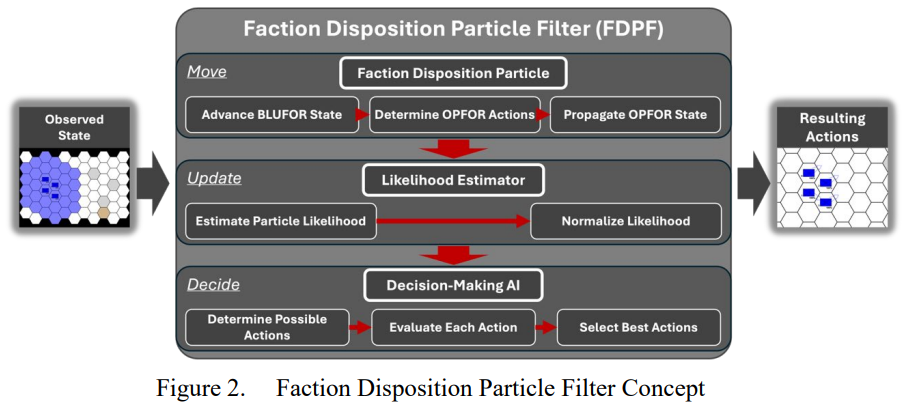
本文研究如何有效设计一种阵营部署粒子滤波器,用于在部分可观测的陆基军事模拟中,于战争迷雾条件下估计敌方部队实体的位置。受军事规划流程的启发,所提出的方法将整个阵营层级的敌方行动方案建模为独立的粒子。与独立估计单位位置的传统方法不同,每个粒子代表了所有敌方部队的协同行为,捕捉其集体意图和作战连贯性。这使得决策人工智能能够基于完整的敌方部署而非零散的单位数据进行推理。实现的原型包含三个核心组件:一套编码合理敌方行动方案的粒子人工智能、一个评估其与当前观测一致性的似然估计器,以及一个基于加权粒子状态选择行动的决策人工智能。经过一系列场景的评估,该方法展示了在不确定性下改进的估计和自适应规划能力。其模块化设计、观察到的局限性以及已识别的权衡为未来的改进奠定了基础,包括动态粒子管理、改进的似然建模和预测性规划。
正如克劳塞维茨(1950)著名论述,战争充满不确定性。在陆基军事行动中,这种不确定性因环境的高度动态和复杂性而加剧,关键信息——例如敌方实体的确切位置——并非总能获取,导致部分可观测的状态。即使随着无人航空载具等先进传感器的可用性日益增加,部分可观测性问题依然存在。包括持续中的乌克兰战争在内的近期冲突表明,即使拥有现代技术,不确定性和部分可观测性仍是战争的基本特征(Kunertova and Herzog, 2024)。军方拥有在不确定条件下做出决策的有效方法。其中一种方法涉及基于可用信息(如地形、观测到的敌方位置和推断的意图)来预测敌方的行动方案。在陆地作战中,这些因素通常为估计敌方行动和形成连贯的态势图提供了足够可靠的基础,并用于为己方的决策提供信息。各国军队均采用此方法。例如,美军的军事决策过程中有相关描述。基于该方法的核心原则,本论文引入了阵营部署粒子滤波器,作为在部分可观测的军事模拟中处理敌方部队实体位置追踪的一种方法(引自 Christian J. Darken,个人通信,2024年8月14日)。此方法旨在模拟人类推断和预测敌方行动的能力,同时保持计算效率。
一、问题陈述
在陆基军事模拟中,不确定性下的决策制定仍然是一个关键挑战,特别是由于部分可观测性这一持续存在的问题。先前的研究探索了使用概率密度方法来开发占据地图,使得脚本化人工智能和基于强化学习的人工智能能够在部分可观测环境中追踪敌方部队实体位置(Jung, 2024)。Jung的方法在简单场景中可靠定位隐藏实体方面取得了成功。然而,也出现了一些关键局限。这些包括随时间推移定位精度下降、聚合分布时信息丢失,以及无法捕捉实体间的协同行为。此外,这些方法通常将每个实体视为独立的,忽略了现实世界军事行动核心的战术相互依赖性。
另一种方法在于使用粒子滤波器,特别是模拟体,它为每个粒子赋予智能(Darken and Anderegg, 2008)。然而,模拟体迄今为止仅被应用于表示单实体行为。本论文在此基础上提出了FDPF,这是一种新颖的方法,其中每个粒子代表整个敌方部队阵营的一个完整的、合理的行动方案。FDPF旨在同时对个体实体位置及其协同战术行为进行建模,为不确定性下的预测提供一种更全面、更现实的手段。
FDPF的实施引入了一些待解决的问题。首先,需要确定适当数量的粒子,并定义简单但足够智能的人工智能来随时间推移演化每个粒子。其次,必须解决基于探测和未探测事件来估计粒子似然的问题,这需要仔细选择概率模型。最后,将这些经过似然加权的粒子整合到决策人工智能中提出了自身的挑战——如何在实现明智行动选择的同时避免振荡或犹豫不决的行为。
本论文通过探索如何设计、校准和利用FDPF,以在部分可观测条件下有效支持模拟陆基军事行动中的人工智能决策,来应对这些挑战。
二、研究问题
基于上述问题陈述,本文旨在回答以下研究问题:
-
主要研究问题 如何有效设计一种基于粒子滤波器、使用阵营部署粒子的方法,以在部分可观测的陆基军事模拟中估计敌方部队实体位置,以及它如何支持决策人工智能确定己方实体的下一步行动?
-
附属研究问题 如何选择粒子数量和用于更新阵营部署粒子的人工智能类型,以充分代表全面范围的合理敌方行动方案,同时保持计算可行性?如何基于新的观测数据估计阵营部署粒子的似然?决策人工智能如何有效利用不同权重的阵营部署粒子来确定己方阵营实体的下一步行动?
三、范围与方法论
本论文重点在于在军事模拟背景下开发并演示FDPF的概念验证。主要目标不是创建该算法的最优或最终实现,而是提出一个可行且功能性的原型以说明其潜力。研究结果旨在作为进一步探索的基础,而非关于FDPF能力的确定性结论。研究范围经过深思熟虑的限定。论文集中于以其基本形式实现和验证FDPF算法,并未尝试专门为粒子滤波器设计优化的决策人工智能。相反,利用了为完全可观测场景开发的、使用脚本化评分函数的现有决策人工智能,来评估粒子滤波器的有效性。此方法确保重点始终放在评估FDPF处理部分可观测性的能力上,而非开发互补的人工智能系统。性能测试是使用模拟环境内已建立的场景和人工智能系统进行的。除非现有场景无法满足测试要求,否则避免创建新场景。此限制旨在保持可行性,并确保精力集中于评估FDPF的核心功能而非场景开发。本论文明确排除了若干领域。研究不涉及优化FDPF或将其集成到专门的决策人工智能中。此外,虽然对粒子滤波器的性能进行了评估,但该评估是初步的,仅限于高层次指标,而非全面或详尽的性能基准测试。FDPF算法被集成到Atlatl中,这是海军研究生院MOVES研究所开发的一个持续进行迭代开发的军事模拟平台。Atlatl非常适合此目的,因为它在简单性(使其能在有限计算资源和时间内运行)和足以获得有意义的见解的复杂性之间取得了平衡。此外,其完全可访问和修改的程序代码,以及其广泛的决策人工智能和场景库,为实验和评估提供了坚实的基础。FDPF算法在Atlatl中的实现被设计为侵入性最小,确保了兼容性和易于集成。具体来说,FDPF应使用与标准人工智能相同的接口,只需对现有Atlatl代码库进行最少的修改。此方法允许无缝使用预先存在的场景和人工智能,不受限制。
四、效益
本研究主要旨在为在粒子滤波器框架内使用阵营部署粒子来追踪军事模拟中部分可观测条件下的敌方部队实体位置建立一个概念验证。本论文旨在评估此方法是否是解决部分可观测性问题的一种可行且高效的途径,以及是否值得进一步开发以应用于学术环境之外的更复杂的作战军事模拟。通过增强信息有限场景下的人工智能决策,本工作有助于创建更真实地反映现实世界行动中固有不确定性的模拟。这反过来又提高了军事模拟用户的价值,并支持在不完整信息条件下制定稳健的策略。
五、结构
本文分为五个主要章节。第一章介绍了研究主题,概述了问题陈述,阐述了主要和附属研究问题,定义了范围和方法论,并强调了本工作的预期效益。第二章提供了理解论文背景和基础所需的背景信息。它包括对模拟环境Atlatl的简明概述,详述了相关机制、特性和局限性,并回顾了相关概念,如粒子滤波器及其在类似领域的应用。第三章介绍了FDPF方法。首先进行概念解释,随后详细描述实现过程。FDPF的每个阶段——移动、更新和决策——都从理论层面引入,随后在Atlatl中的原型实现里具体化。第四章评估了所开发的FDPF原型。评估围绕FDPF的核心组件展开,重点关注粒子逻辑、似然估计器和决策人工智能的性能。同时提供了定性洞察和定量结果以评估原型的有效性。最后,第五章总结了研究结果,回答了研究问题,并为潜在的扩展和进一步研究提供了建议。
