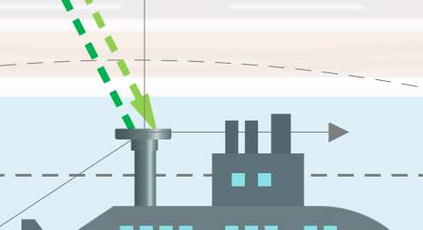
Underwater sensor networks (UWSNs) are of interest to gather data from underwater sensor nodes (SNs) and deliver information to a terrestrial access point (AP) in the uplink transmission, and transfer data from the AP to the SNs in the downlink transmission. In this paper, we investigate a triple-hop UWSN in which autonomous underwater vehicle (AUV) and unmanned aerial vehicle (UAV) relays enable end-to-end communications between the SNs and the AP. It is assumed that the SN--AUV, AUV--UAV, and UAV--AP links are deployed by underwater optical communication (UWOC), free-space optic (FSO), and radio frequency (RF) technologies, respectively. Two scenarios are proposed for the FSO uplink and downlink transmissions between the AUV and the UAV, subject to water-to-air and air-to-water interface impacts; direct transmission scenario (DTS) and retro-reflection scenario (RRS). After providing the channel models and their statistics, the UWSN's outage probability and average bit error rate (BER) are computed. Besides, a tracking procedure is proposed to set up reliable and stable AUV--UAV FSO communications. Through numerical results, it is concluded that the RSS scheme outperforms the DTS one with about 200% (32%) and 80% (17%) better outage probability (average BER) in the uplink and downlink, respectively. It is also shown that the tracking procedure provides on average 480% and 170% improvements in the network's outage probability and average BER, respectively, compared to poorly aligned FSO conditions. The results are verified by applying Monte-Carlo simulations.
翻译:水下传感器网络(UWSNs)有兴趣收集水下传感器节点(SNS)的数据,并将信息传送到上行传输的地面接入点(AP),并将数据从AP传输到下行传输的SNS(RF)技术。在本文中,我们调查了三重跳UWSN,其中自主水下飞行器(AUV)和无人驾驶航空飞行器(UAV)中继器能够让自定义和AP(UAV)之间的端到端通信。假定SN-AV、AV-UAV-AV(UAV-AV-AP)和UAV-AP(AV-AP)的连接是通过水下光学通信(UWOC)、自由空间光学(FSO)和无线电频率(RFR)技术分别通过水上至空和空对空对端接口的连接,直接传输(DSV(RS)情景和回溯流(RES)的情景,在提供频道模型及其统计数据后,UWSN(U值比值平均概率(V)的比值平均概率和平均计算结果中显示比前的概率(BAV)将显示一个更好的概率和平均结果。