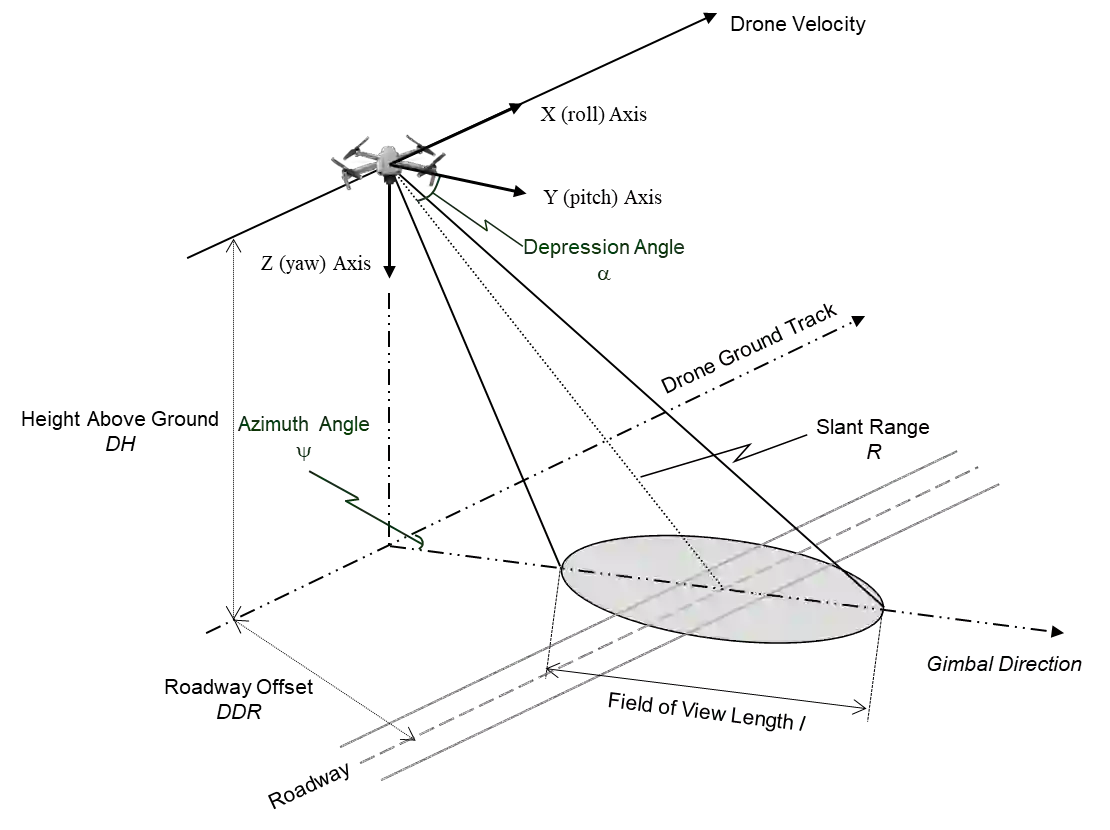
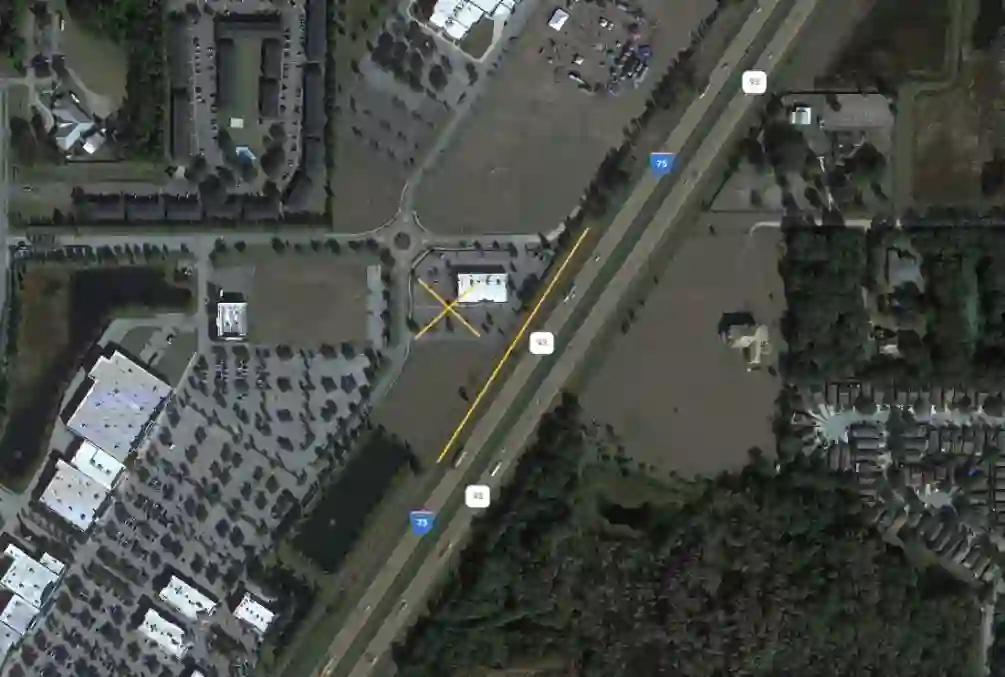
There is a rapid growth of applications of Unmanned Aerial Vehicles (UAVs) in traffic management, such as traffic surveillance, monitoring, and incident detection. However, the existing literature lacks solutions to real-time incident detection while addressing privacy issues in practice. This study explored real-time vehicle detection algorithms on both visual and infrared cameras and conducted experiments comparing their performance. Red Green Blue (RGB) videos and thermal images were collected from a UAS platform along highways in the Tampa, Florida, area. Experiments were designed to quantify the performance of a real-time background subtraction-based method in vehicle detection from a stationary camera on hovering UAVs under free-flow conditions. Several parameters were set in the experiments based on the geometry of the drone and sensor relative to the roadway. The results show that a background subtraction-based method can achieve good detection performance on RGB images (F1 scores around 0.9 for most cases), and a more varied performance is seen on thermal images with different azimuth angles. The results of these experiments will help inform the development of protocols, standards, and guidance for the use of drones to detect highway congestion and provide input for the development of incident detection algorithms.
翻译:无人驾驶航空飞行器(无人驾驶飞行器)在交通管理方面的应用迅速增加,例如交通监测、监测和事故探测;然而,现有文献缺乏在实际中处理隐私问题时实时发现事故的解决方案;这项研究探讨了视觉和红外摄像头上的实时车辆探测算法,并进行了实验;在佛罗里达州坦帕高速公路沿线的无人驾驶航空飞行器(无人驾驶飞行器)平台上收集了红色绿色蓝色(RGB)录像和热图像;设计了实验,以量化在自由流通条件下对漂浮的无人驾驶飞行器的固定相机进行车辆探测的实时背景减值法;根据无人驾驶飞机和传感器与公路有关的几何测量,在实验中设定了若干参数;研究结果表明,基于背景的减值方法可以在RGB图像上取得良好的探测性能(大多数情况下为F1分,约0.9分),在具有不同方位角度的热图像上看到更不同的性能。这些实验的结果将有助于为使用无人驾驶飞机探测高速公路和提供输入数据,从而开发探测飞机事故的操作程序、标准和指导。