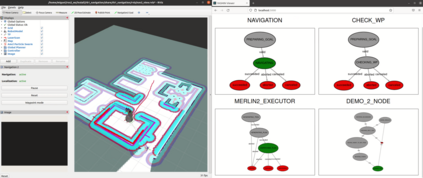
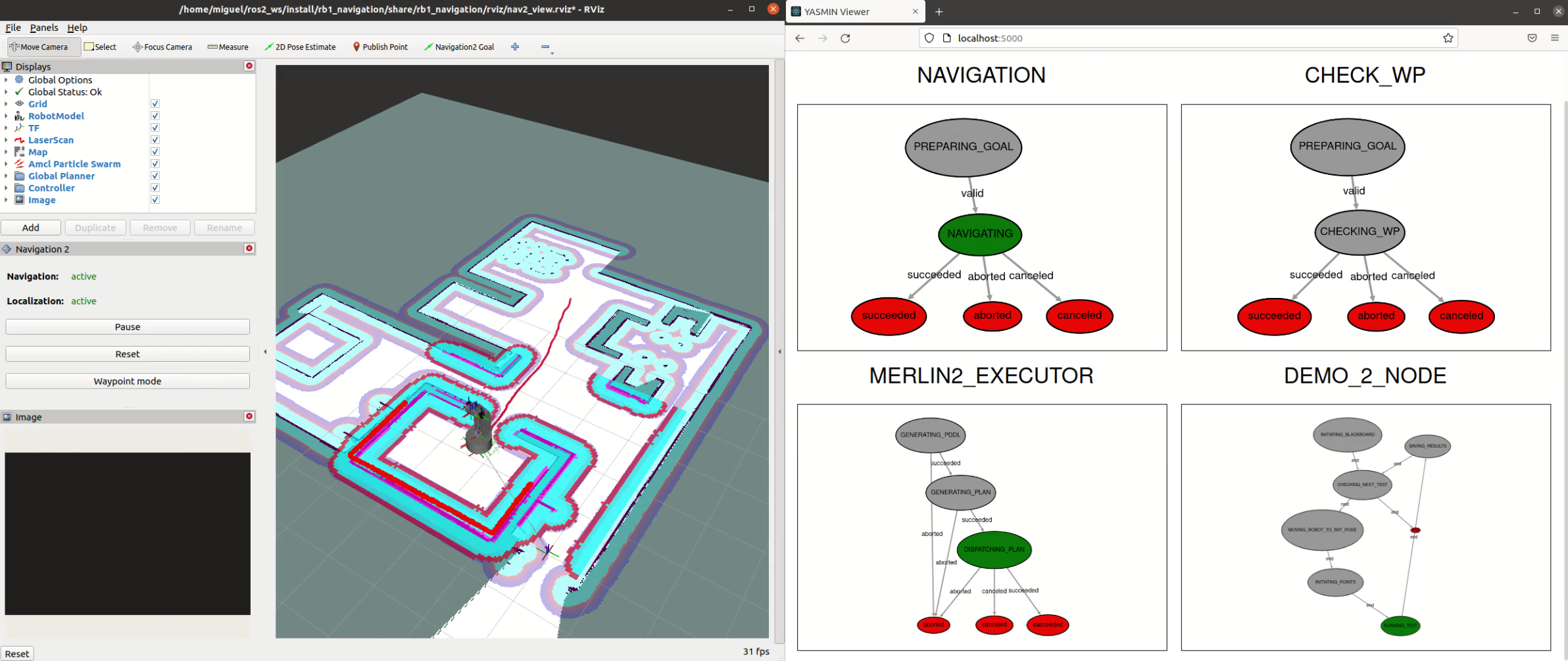
State machines are a common mechanism for defining behaviors in robots, defining them based on identifiable stages. There are several libraries available for easing the implementation of state machines in ROS 1, as SMACH or SMACC, but there are fewer alternatives for ROS 2. YASMIN is yet another library specifically designed for ROS 2 for easing the design of robotic behaviors using state machines. It is available in C++ and Python, provides some default states to speed up the development, and a web viewer for monitoring the execution of the system and helping in the debugging.
翻译:国有机器是界定机器人行为的一个共同机制,根据可识别的阶段来界定机器人行为。 有几个图书馆可以方便在ROS 1(SMACH 或 SMACC)中实施国有机器,但在ROS 2. YASMIN是另一个专门为ROS 2(使用国有机器简化机器人行为设计设计)设计的图书馆。 C++ 和 Python(Python)提供了一些默认状态,以加快开发速度,并提供了一个网络查看器,用以监测系统的运行并帮助调试。