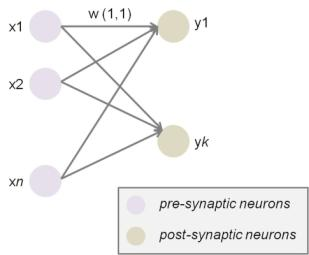
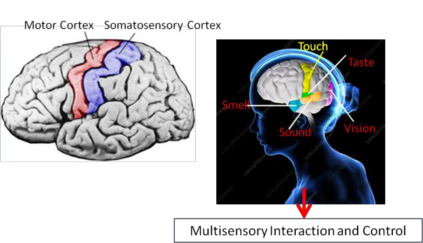
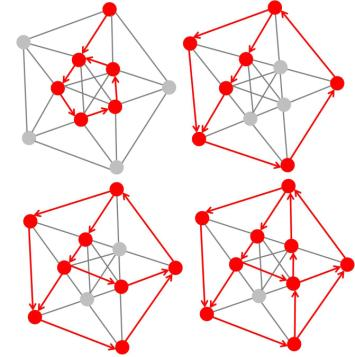
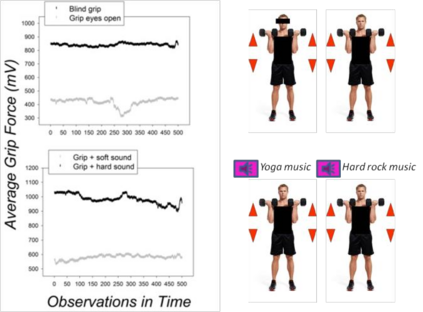
The neural networks of the brain are capable of learning statistical input regularities on the basis of synaptic learning, functional integration into increasingly larger, interconnected neural assemblies, and self organization. This self organizing ability has implications for biologically inspired control structures in robotics. On the basis of signal input from vision, sound, smell, touch and proprioception, multisensory representations for action are generated on the basis of physically specified input from the environment. The somatosensory cortex is a brain hub that delivers a choice example of integration for multifunctional representation and control. All sensory information is in a first instance topologically represented in the biological brain, and thereafter integrated in somatosensory neural networks for multimodal and multifunctional control of complex behaviors. Multisignal input triggers interactions between visual, auditory, tactile, olfactive, and proprioceptive mechanisms, which cooperate or compete during learning, and contribute to the formation of integrated representations for action, reflection, and communication between the agent and the outside world. Interaction fuels complex behavioral strategy deployment and further learning for increasingly coherent representation of intrinsically ambiguous physical environments.
翻译:大脑神经网络能够在合成学习的基础上学习统计投入的规律性,功能性整合成为日益扩大、相互联系的神经组件和自我组织。这种自我组织能力对机器人中生物激励的控制结构有影响。根据视觉、声音、气味、触摸和自动感知的信号输入,多感官行动演示是根据环境的物理特定投入产生的。Somatosensory 皮层是一个大脑枢纽,它为多功能代表和控制提供了一种综合选择的范例。所有感官信息首先在生物大脑中以表层为代表,随后又融入了用于复杂行为多式联运和多功能控制的自觉神经网络。多信号输入触发视觉、听觉、触觉、流动和感官机制之间的相互作用,这些互动在学习期间进行合作或竞争,有助于形成代理人与外部世界之间行动、思考和交流的综合表述。互动为复杂的行为战略部署和进一步学习提供了复杂的行为战略,以便日益一致地代表内在模糊的物理环境。