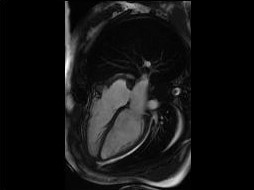
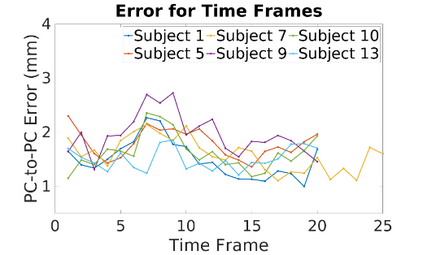
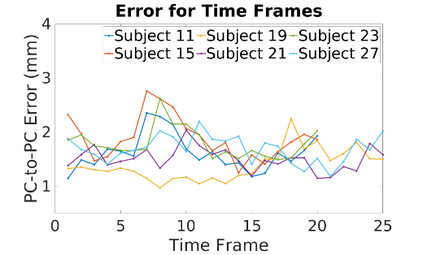
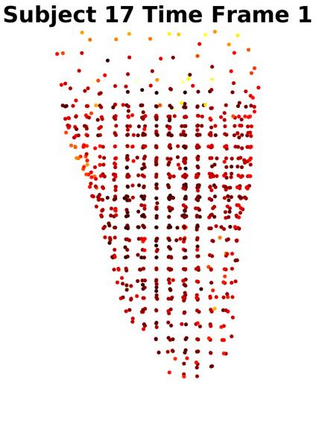
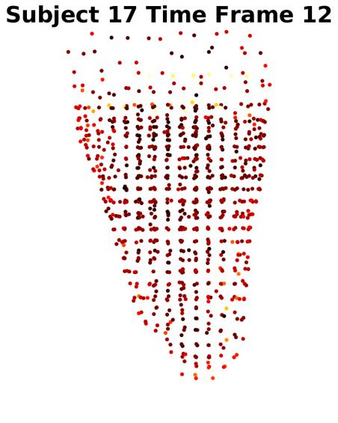
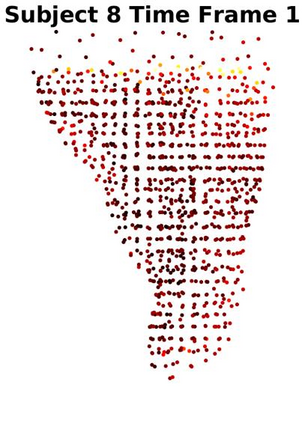
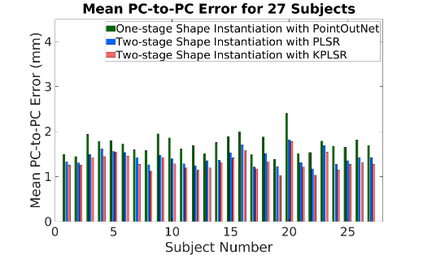
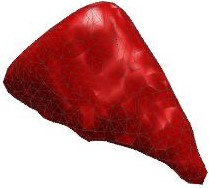
Shape instantiation which predicts the 3D shape of a dynamic target from one or more 2D images is important for real-time intra-operative navigation. Previously, a general shape instantiation framework was proposed with manual image segmentation to generate a 2D Statistical Shape Model (SSM) and with Kernel Partial Least Square Regression (KPLSR) to learn the relationship between the 2D and 3D SSM for 3D shape prediction. In this paper, the two-stage shape instantiation is improved to be one-stage. PointOutNet with 19 convolutional layers and three fully-connected layers is used as the network structure and Chamfer distance is used as the loss function to predict the 3D target point cloud from a single 2D image. With the proposed one-stage shape instantiation algorithm, a spontaneous image-to-point cloud training and inference can be achieved. A dataset from 27 Right Ventricle (RV) subjects, indicating 609 experiments, were used to validate the proposed one-stage shape instantiation algorithm. An average point cloud-to-point cloud (PC-to-PC) error of 1.72mm has been achieved, which is comparable to the PLSR-based (1.42mm) and KPLSR-based (1.31mm) two-stage shape instantiation algorithm.
翻译:从一个或一个以上 2D 图像中预测动态目标的 3D 形状的瞬变形状,对于实时操作内部导航很重要。 之前,曾提出一个带有人工图像分割的通用形状即时框架, 以生成一个 2D 统计形状模型(SSMS), 并与 Kernel 部分最小方平方回归(KPLSR) 一起, 以学习 2D 和 3D SSM 形状的3D 形状, 用于3D 形状的预测。 在本文件中, 两阶段的形状即时转换改进为一个阶段。 带有19 卷层和 3 个完全连接的层的PointOutNet 用作网络结构, 而Chamfer 距离用作从一个 2D 图像中预测 3D 目标点云云云的丢失功能。 使用拟议的一阶段即时态云- 和 PL 42 (PC- PL 42) 的直径( PL- 42) 级算算法( ) 已经实现了一个阶段至 PR- 42 级的1 毫米 和 PL42 级的直径 级 级 级 级 级 级 级 级 级算算法( ) 。