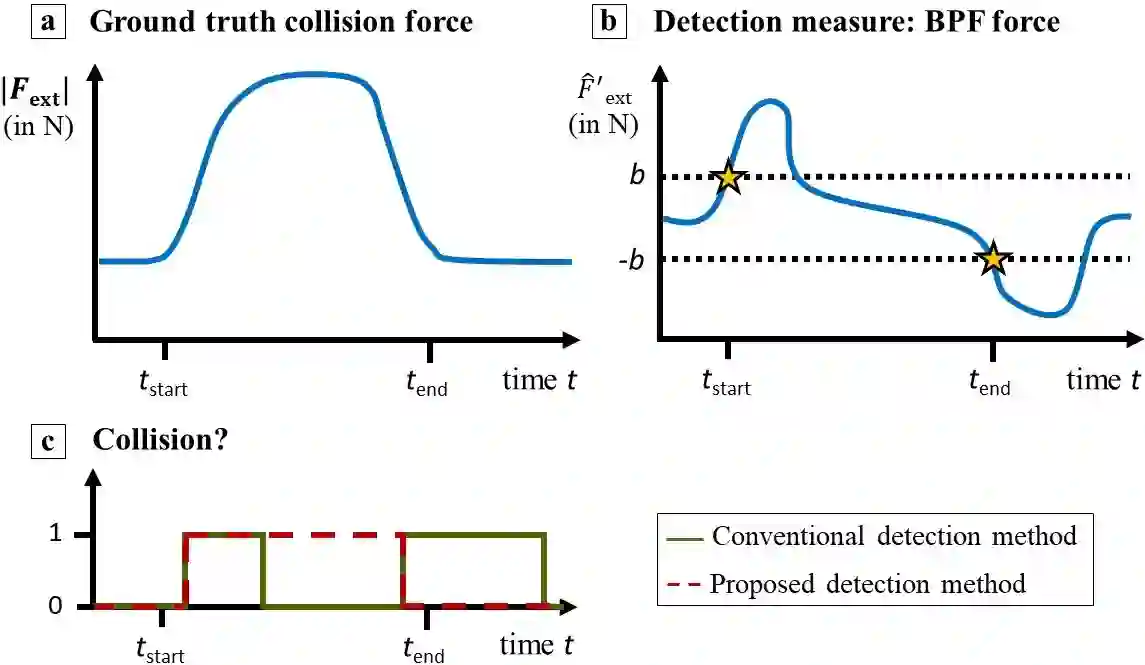
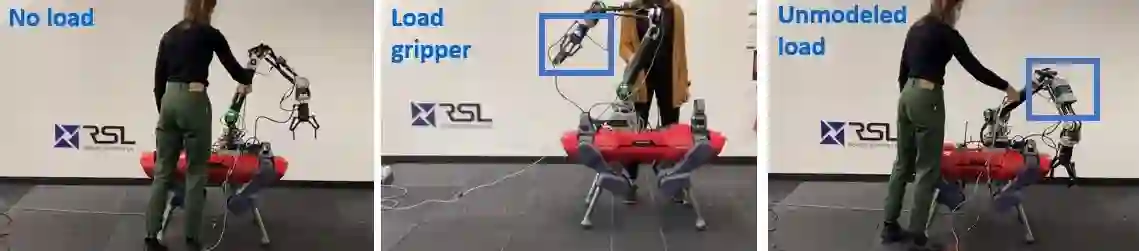
To safely deploy legged robots in the real world it is necessary to provide them with the ability to reliably detect unexpected contacts and accurately estimate the corresponding contact force. In this paper, we propose a collision detection and identification pipeline for a quadrupedal manipulator. We first introduce an approach to estimate the collision time span based on band-pass filtering and show that this information is key for obtaining accurate collision force estimates. We then improve the accuracy of the identified force magnitude by compensating for model inaccuracies, unmodeled loads, and any other potential source of quasi-static disturbances acting on the robot. We validate our framework with extensive hardware experiments in various scenarios, including trotting and additional unmodeled load on the robot.
翻译:为了在现实世界中安全部署脚步机器人,必须为他们提供可靠地探测出意外接触的能力,并准确估计相应的接触力量。在本文件中,我们提议为四重操纵者提供碰撞探测和识别管道。我们首先采用一种基于带式过滤法估计碰撞时间跨度的方法,并表明这一信息是获得准确的碰撞力估计数的关键。然后通过补偿模型的不准确性、未经改装的载荷和机器人上其他任何可能的准静态扰动源,提高所查明的军力强度的准确性。我们用各种情景的大规模硬件实验来验证我们的框架,包括旋转和对机器人的额外非模拟载荷。