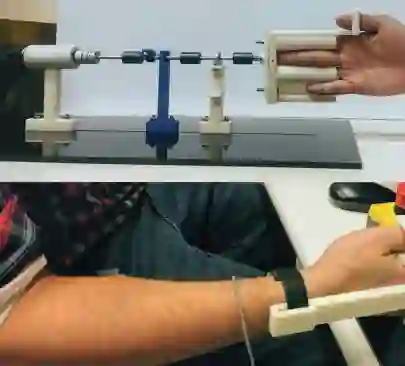
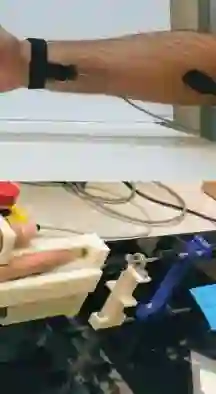
Creating haptic interfaces capable of rendering the rich sensation needed for dexterous manipulation is crucial for the advancement of human-in-the-loop telerobotic systems (HiLTS). One limiting factor has been the absence of detailed knowledge of the effect of operator limb dynamics and haptic exploration dynamics on haptic perception. We propose to begin investigations of these effects with single-joint haptic exploration and feedback of physical and virtual environments. Here, we present our experimental apparatus, a 1-DoF rotational kinesthetic haptic device and electromyography (EMG) system, along with preliminary findings from our efforts to investigate the change in stiffness discrimination thresholds for differing exploration velocities. Result trends indicate a possible relationship between exploration velocity and discrimination thresholds, as well as a complex interaction between muscle activation, exploration velocity, and haptic feedback.
翻译:一个限制因素是缺乏对操作者肢体动态和偶然探索动态对偶然感知的影响的详细了解。我们提议开始对这些影响进行调查,同时进行单一联合的偶然性探索和对物理和虚拟环境的反馈。在这里,我们展示了我们的实验设备、1-DoF轮用动脉机装置和电传学系统,以及我们调查不同探索速度的僵硬性差别阈值变化的初步结果。结果趋势表明探索速度与歧视阈值之间可能存在的关系,以及肌肉激活、探索速度和随机反馈之间的复杂互动。