
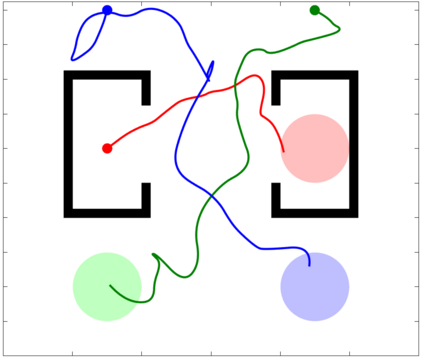
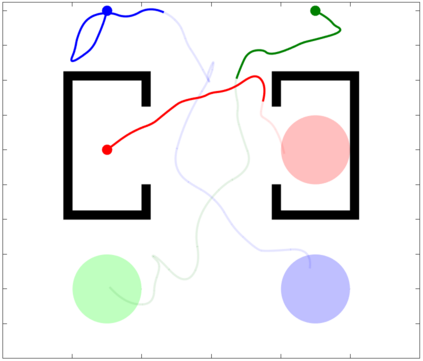
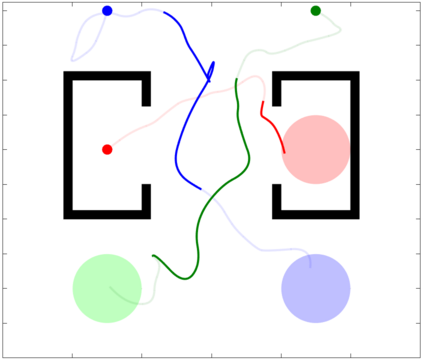
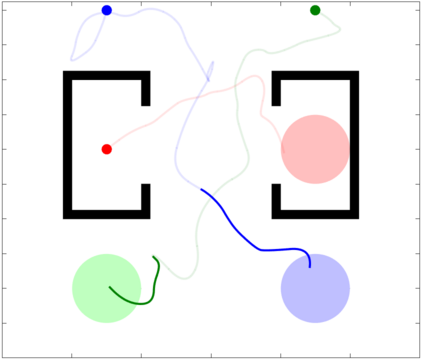
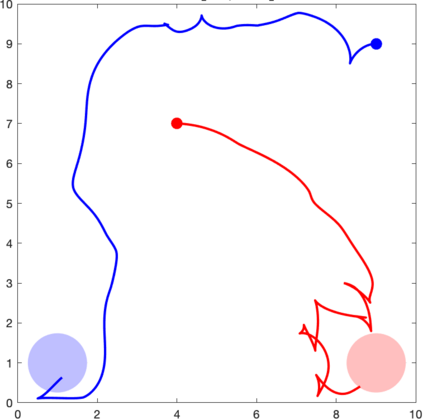
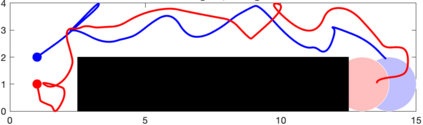
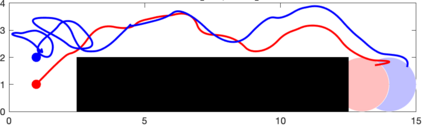
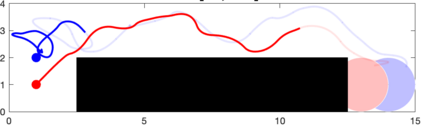
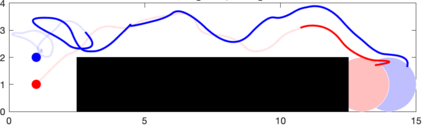
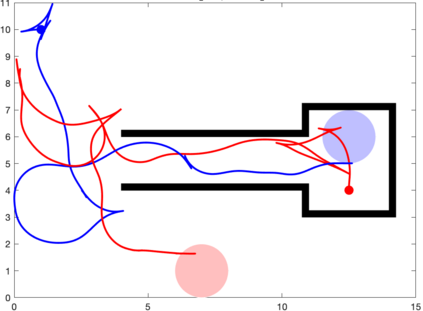
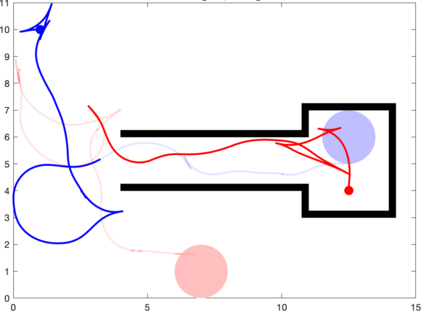
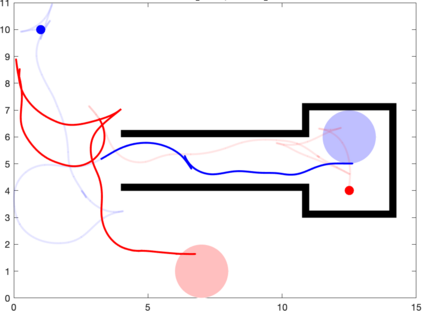
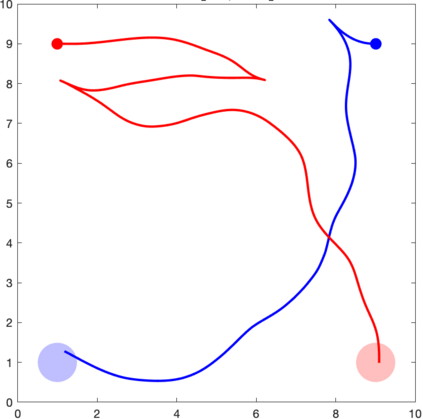
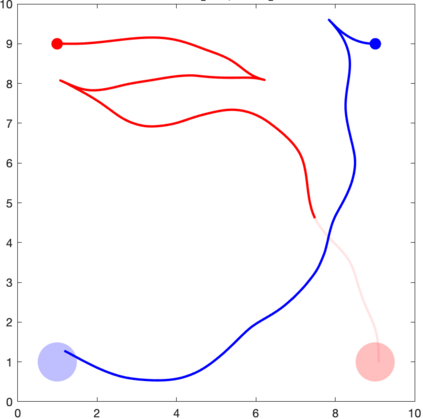
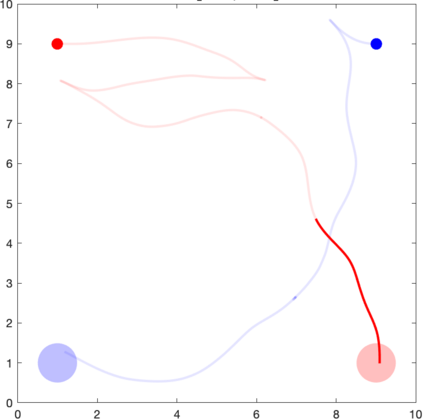
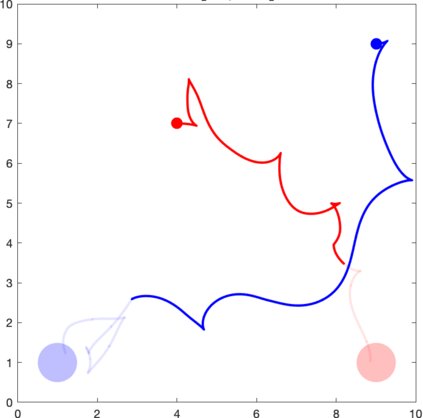
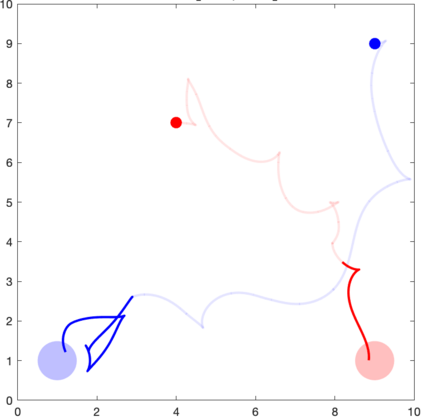
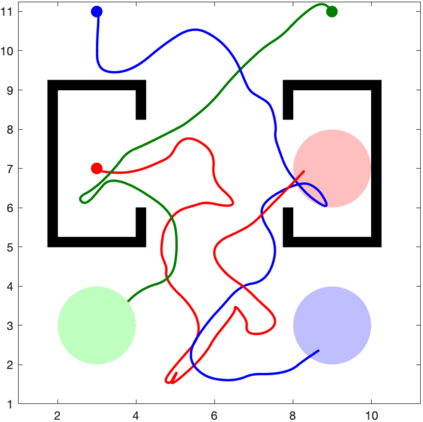
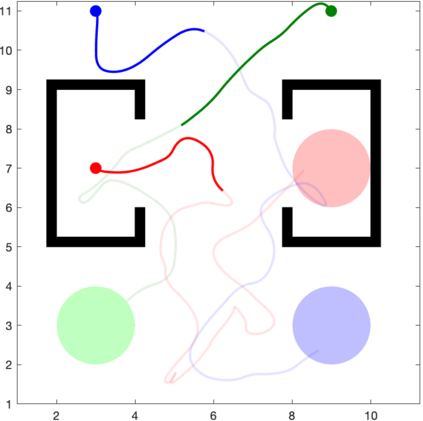
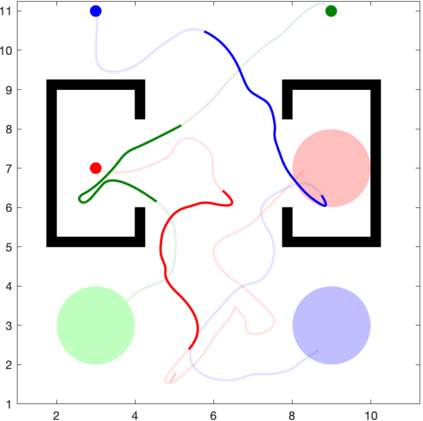
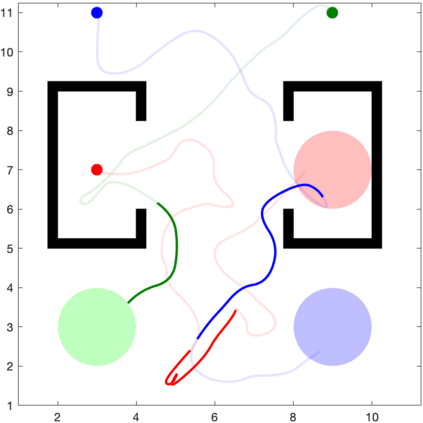
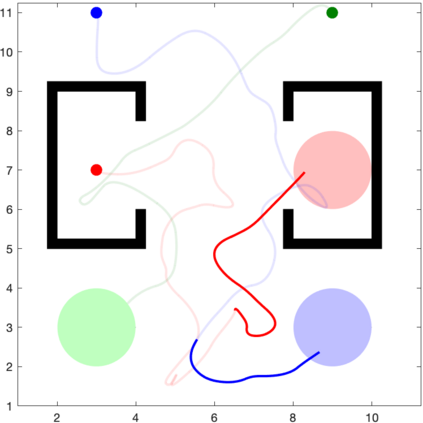
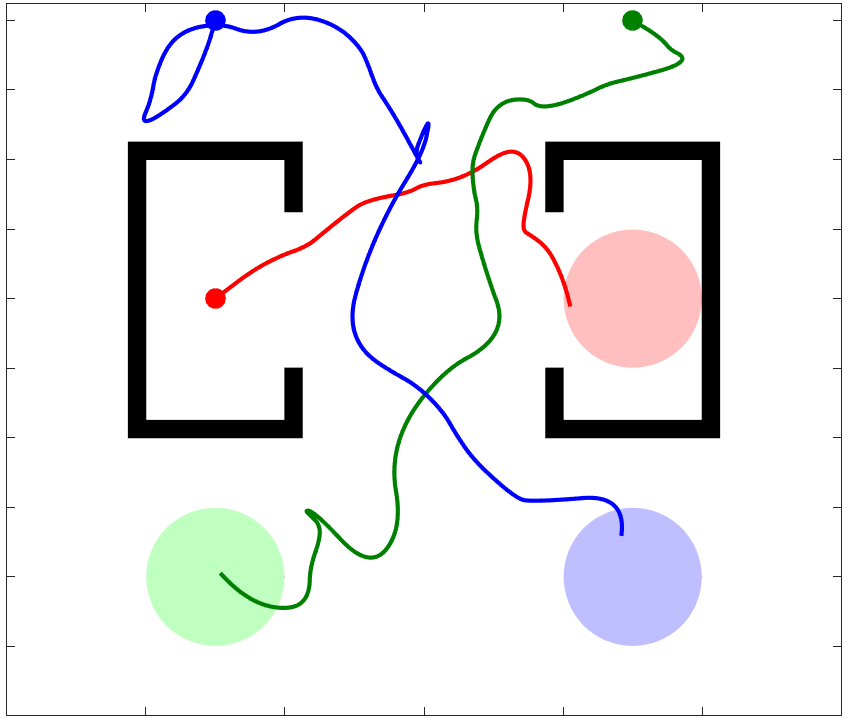
Traditional multi-robot motion planning (MMP) focuses on computing trajectories for multiple robots acting in an environment, such that the robots do not collide when the trajectories are taken simultaneously. In safety-critical applications, a human supervisor may want to verify that the plan is indeed collision-free. In this work, we propose a notion of explanation for a plan of MMP, based on visualization of the plan as a short sequence of images representing time segments, where in each time segment the trajectories of the agents are disjoint, clearly illustrating the safety of the plan. We show that standard notions of optimality (e.g., makespan) may create conflict with short explanations. Thus, we propose meta-algorithms, namely multi-agent plan segmenting-X (MAPS-X) and its lazy variant, that can be plugged on existing centralized sampling-based tree planners X to produce plans with good explanations using a desirable number of images. We demonstrate the efficacy of this explanation-planning scheme and extensively evaluate the performance of MAPS-X.
翻译:传统的多机器人运动规划(MMP)侧重于计算在环境中运行的多机器人的轨迹,使机器人不会在轨迹同时发生时发生碰撞。在安全关键应用中,人类监督员可能希望核实该计划是否确实没有碰撞。在这项工作中,我们提出对MMP计划的解释概念,其依据是将计划作为代表时间段的短片的短顺序,在时间段中,代理器的轨迹是脱节的,清楚地说明计划的安全性。我们表明,最佳性的标准概念(例如Makespan)可能会与简短的解释发生冲突。因此,我们提议了元相适应的概念,即多剂计划分段-X(MAPS-X)及其懒惰的变体,可以插在现有的中央采样树规划员X(X)上,以便利用适当数量的图像作出良好的解释。我们展示了这一解释性规划计划的效率,并广泛评价MAPS-X的性能。
相关内容

- Today (iOS and OS X): widgets for the Today view of Notification Center
- Share (iOS and OS X): post content to web services or share content with others
- Actions (iOS and OS X): app extensions to view or manipulate inside another app
- Photo Editing (iOS): edit a photo or video in Apple's Photos app with extensions from a third-party apps
- Finder Sync (OS X): remote file storage in the Finder with support for Finder content annotation
- Storage Provider (iOS): an interface between files inside an app and other apps on a user's device
- Custom Keyboard (iOS): system-wide alternative keyboards
Source: iOS 8 Extensions: Apple’s Plan for a Powerful App Ecosystem


