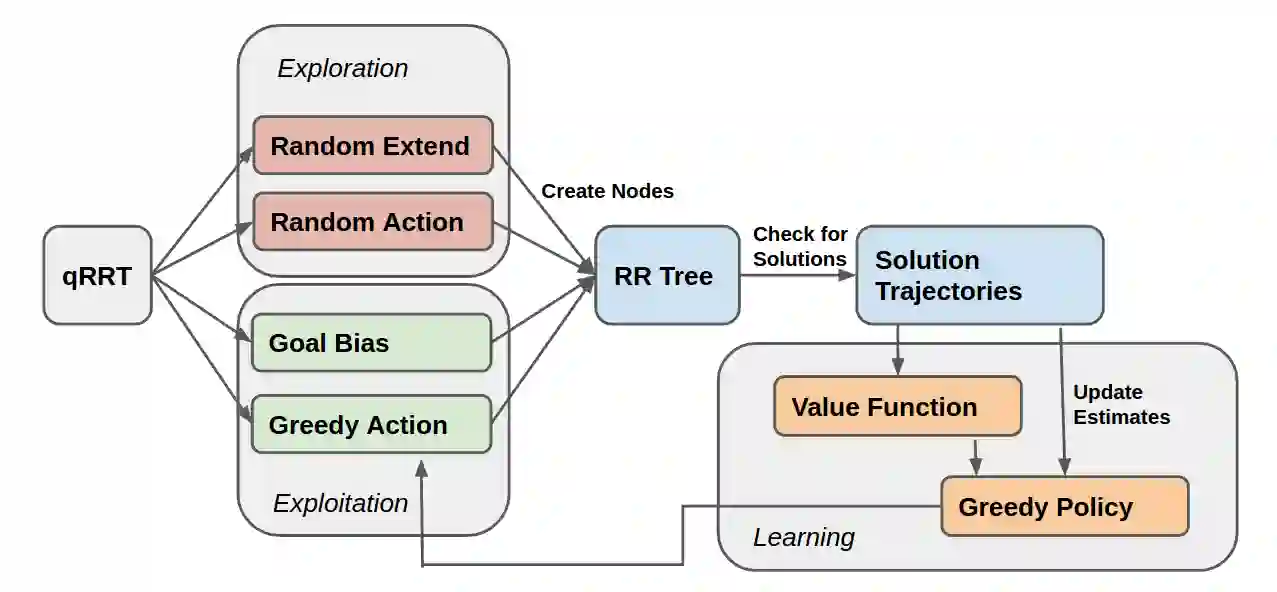
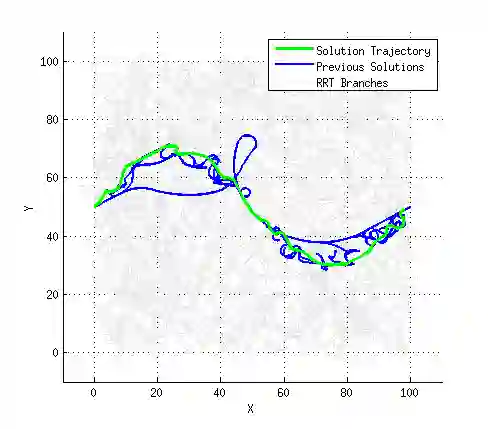
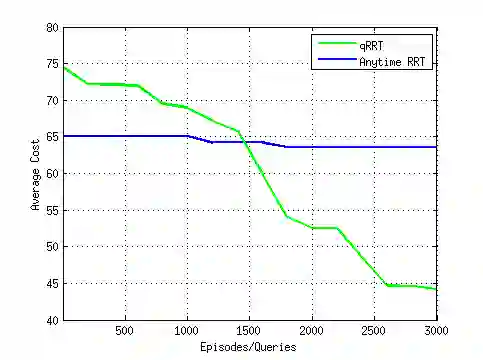
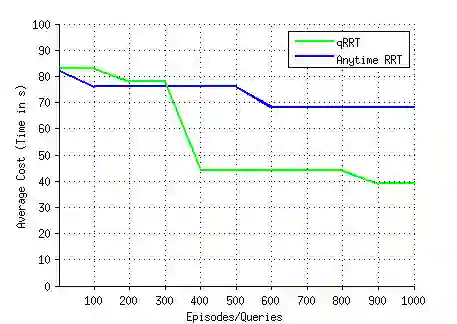
This paper presents a sampling-based method for optimal motion planning in non-holonomic systems in the absence of known cost functions. It uses the principle of learning through experience to deduce the cost-to-go of regions within the workspace. This cost information is used to bias an incremental graph-based search algorithm that produces solution trajectories. Iterative improvement of cost information and search biasing produces solutions that are proven to be asymptotically optimal. The proposed framework builds on incremental Rapidly-exploring Random Trees (RRT) for random sampling-based search and Reinforcement Learning (RL) to learn workspace costs. A series of experiments were performed to evaluate and demonstrate the performance of the proposed method.
翻译:本文介绍了在没有已知成本功能的情况下,在非金体系系统进行最佳运动规划的抽样方法,它利用通过经验学习的原则来推算工作空间内各区域的成本与成本之间的差别,这种成本信息被用来偏向产生溶解轨迹的基于图表的递增搜索算法,对成本信息和搜索偏差的迭代改进所产生的解决办法被证明是象征性的优化,拟议框架以随机抽样搜索和强化学习的渐进式快速探索随机树为基础,学习工作空间成本,进行了一系列的实验,以评价和展示拟议方法的绩效。