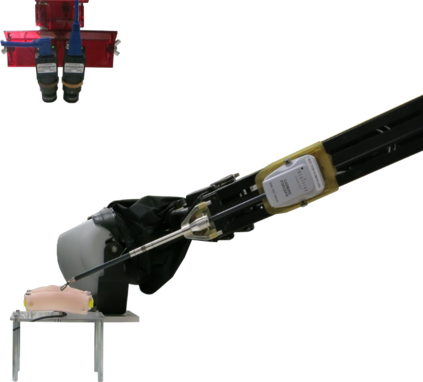
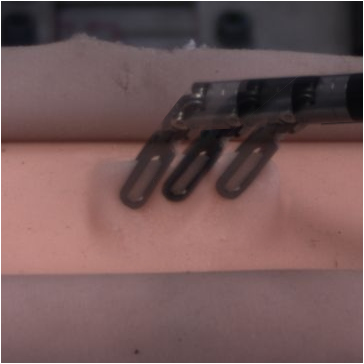
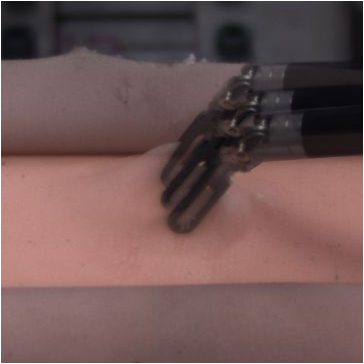
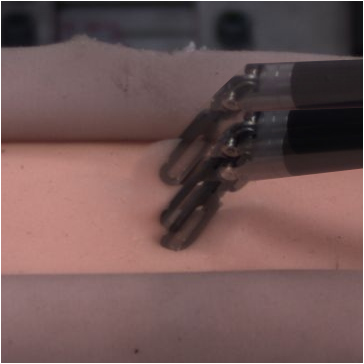
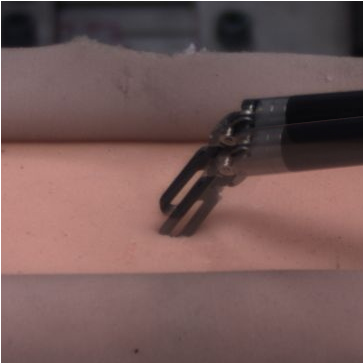
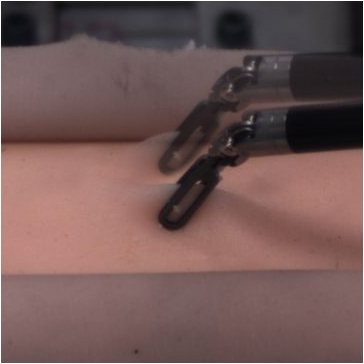
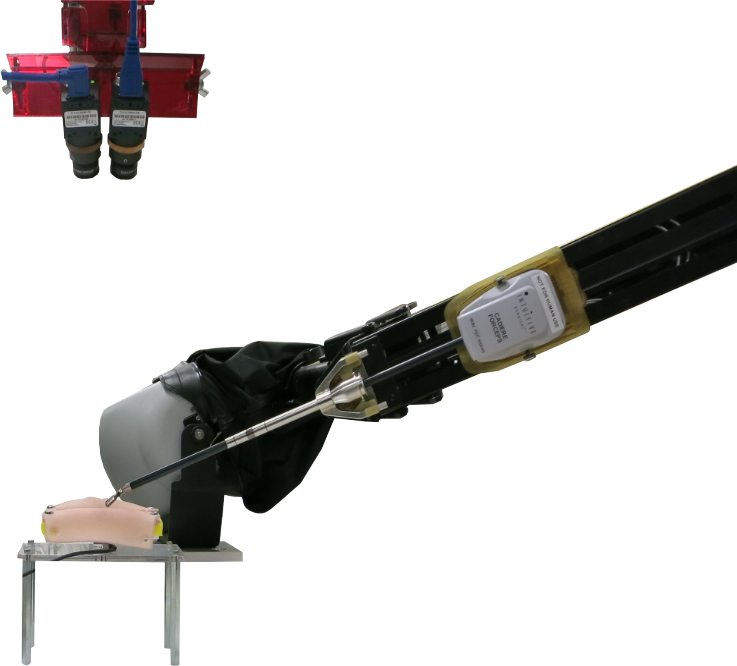
Force estimation using neural networks is a promising approach to enable haptic feedback in minimally invasive surgical robots without end-effector force sensors. Various network architectures have been proposed, but none have been tested in real-time with surgical-like manipulations. Thus, questions remain about the real-time transparency and stability of force feedback from neural network-based force estimates. We characterize the real-time impedance transparency and stability of force feedback rendered on a da Vinci Research Kit teleoperated surgical robot using neural networks with vision-only, state-only, or state and vision inputs. Networks were trained on an existing dataset of teleoperated manipulations without force feedback. We measured real-time transparency without rendered force feedback by commanding the patient-side robot to perform vertical retractions and palpations on artificial silicone tissue. To measure stability and transparency during teleoperation with force feedback to the operator, we modeled a one-degree-of-freedom human and surgeon-side manipulandum that moved the patient-side robot to perform manipulations. We found that the multimodal vision and state network displayed more transparent impedance than single-modality networks under no force feedback. State-based networks displayed instabilities during manipulation with force feedback. This instability was reduced in the multimodal network when refit with additional data collected during teleoperation with force feedback.
翻译:使用神经网络进行武力估测是一个很有希望的方法,可以使侵入性极小的手术机器人在没有终端效应部队传感器的情况下获得临时反馈。提出了各种网络结构,但还没有通过类似手术的操纵进行实时测试。因此,关于神经网络部队估测得出的武力反馈的实时透明度和稳定性问题仍然存在。我们把在达芬奇研究工具包上提供武力反馈的实时阻碍性和稳定性特征定性为,使用只视线、只收状态或状态和视觉投入的神经网络进行神经操作手术机器人;对网络进行了关于在没有武力反馈的情况下进行远程操作操作操作的现有数据集的培训。我们通过命令患者机器人对人工硅酮组织进行纵向回溯和感应来实时测量实时透明度。在与操作者进行武力反馈的远程合作期间,我们模拟了一个一度自由人类和外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科手术机器人进行操纵操作网络进行操纵操纵的实时操纵网络操作。我们进行了操纵的操纵。我们方外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科外科