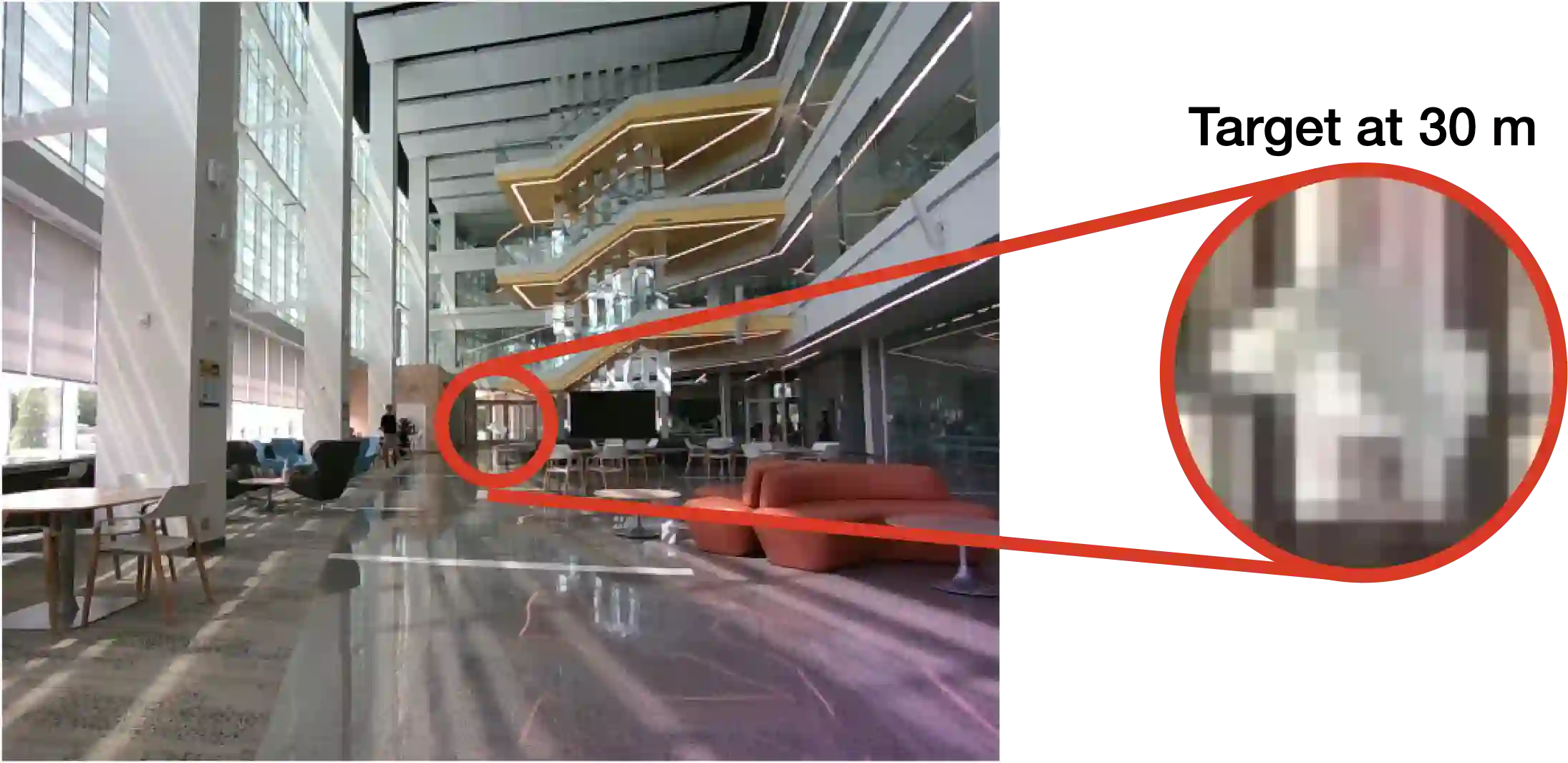
Targets are essential in problems such as object tracking in cluttered or textureless environments, camera (and multi-sensor) calibration tasks, and simultaneous localization and mapping (SLAM). Target shapes for these tasks typically are symmetric (square, rectangular, or circular) and work well for structured, dense sensor data such as pixel arrays (i.e., image). However, symmetric shapes lead to pose ambiguity when using sparse sensor data such as LiDAR point clouds and suffer from the quantization uncertainty of the LiDAR. This paper introduces the concept of optimizing target shape to remove pose ambiguity for LiDAR point clouds. A target is designed to induce large gradients at edge points under rotation and translation relative to the LiDAR to ameliorate the quantization uncertainty associated with point cloud sparseness. Moreover, given a target shape, we present a means that leverages the target's geometry to estimate the target's vertices while globally estimating the pose. Both the simulation and the experimental results (verified by a motion capture system) confirm that by using the optimal shape and the global solver, we achieve centimeter error in translation and a few degrees in rotation even when a partially illuminated target is placed 30 meters away. All the implementations and datasets are available at https://github.com/UMich-BipedLab/optimal_shape_global_pose_estimation.
翻译:目标对于诸如杂乱或无纹理环境中的物体跟踪、相机(和多传感器)校准任务以及同步本地化和绘图(SLAM)等问题来说是必不可少的。这些任务的目标形状通常是对称的(方形、矩形或圆形),对于像素阵列(即图像)等结构化、密集的传感器数据来说效果良好。然而,当使用诸如LIDAR点云等稀疏的传感器数据并受到LIDAR的量化不确定性的影响时,对称形状导致模糊。本文介绍了优化目标形状以去除LIDAR点云的模糊性的概念。一个目标形状在与LIDAR相对的旋转和翻译的边缘点上诱发很大的梯度,以缓解与点云的稀疏(即图像)相关的四重感。此外,鉴于目标形状的形状,我们展示了一种手段来利用目标的几何测度来估计目标的脊椎值,同时进行全球估测。模拟和实验结果(经运动捕获系统验证的)在LAR点云值云值云值云中,甚至以最佳的平面度度/平面度度/平地平地平流化度/平地平流度数据,在最精确度上确认,我们获得了多少度数据。