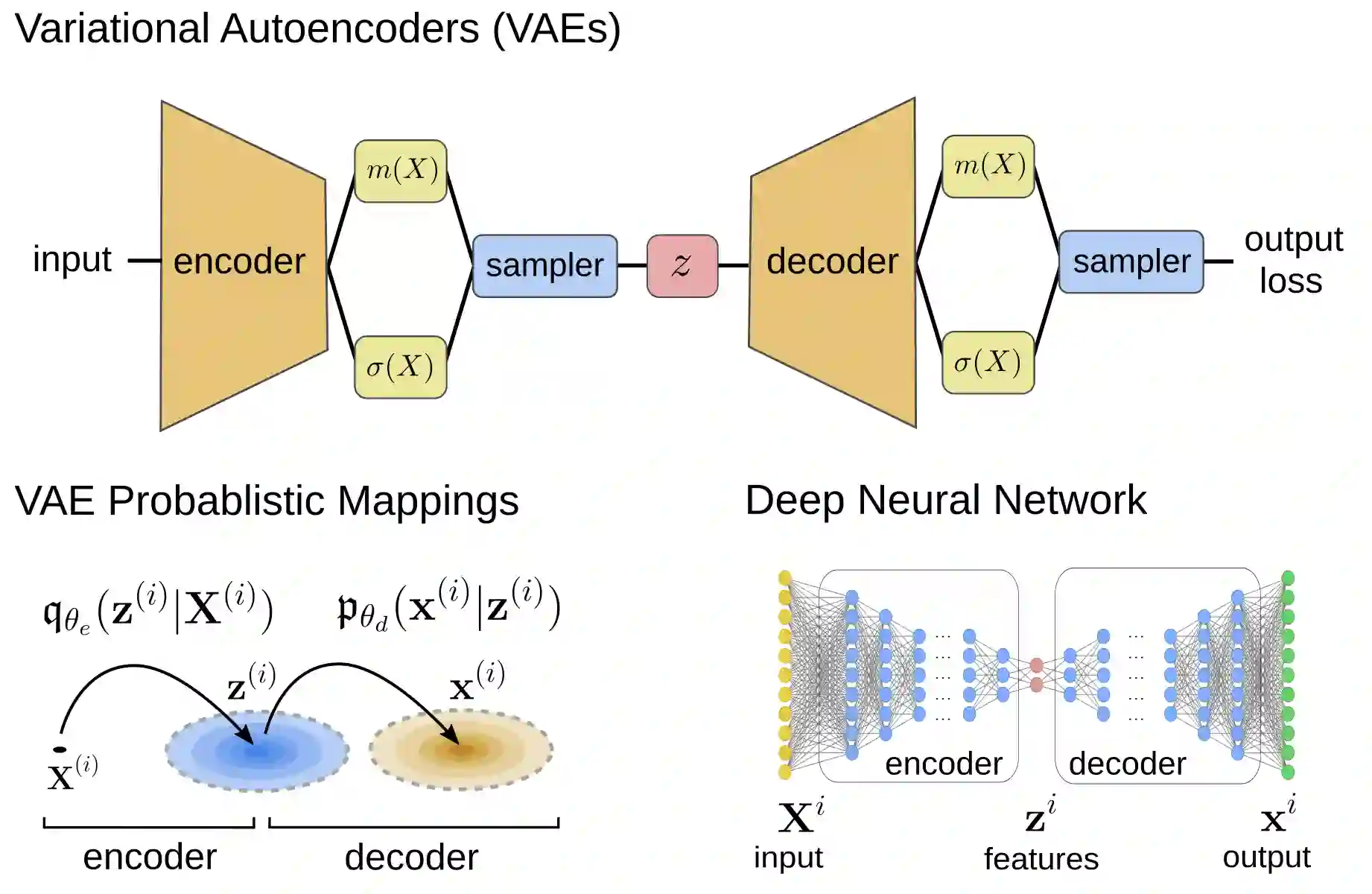
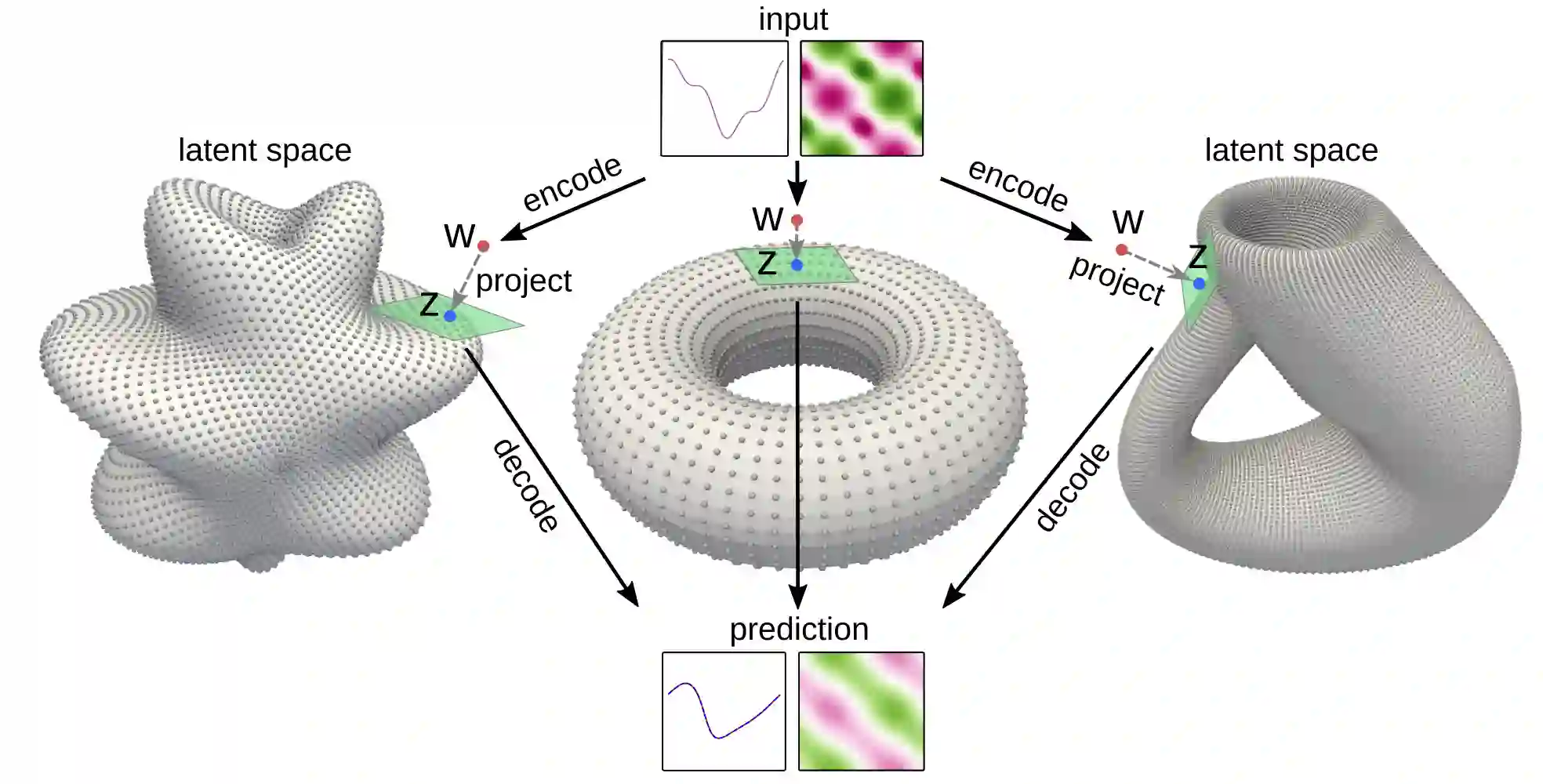
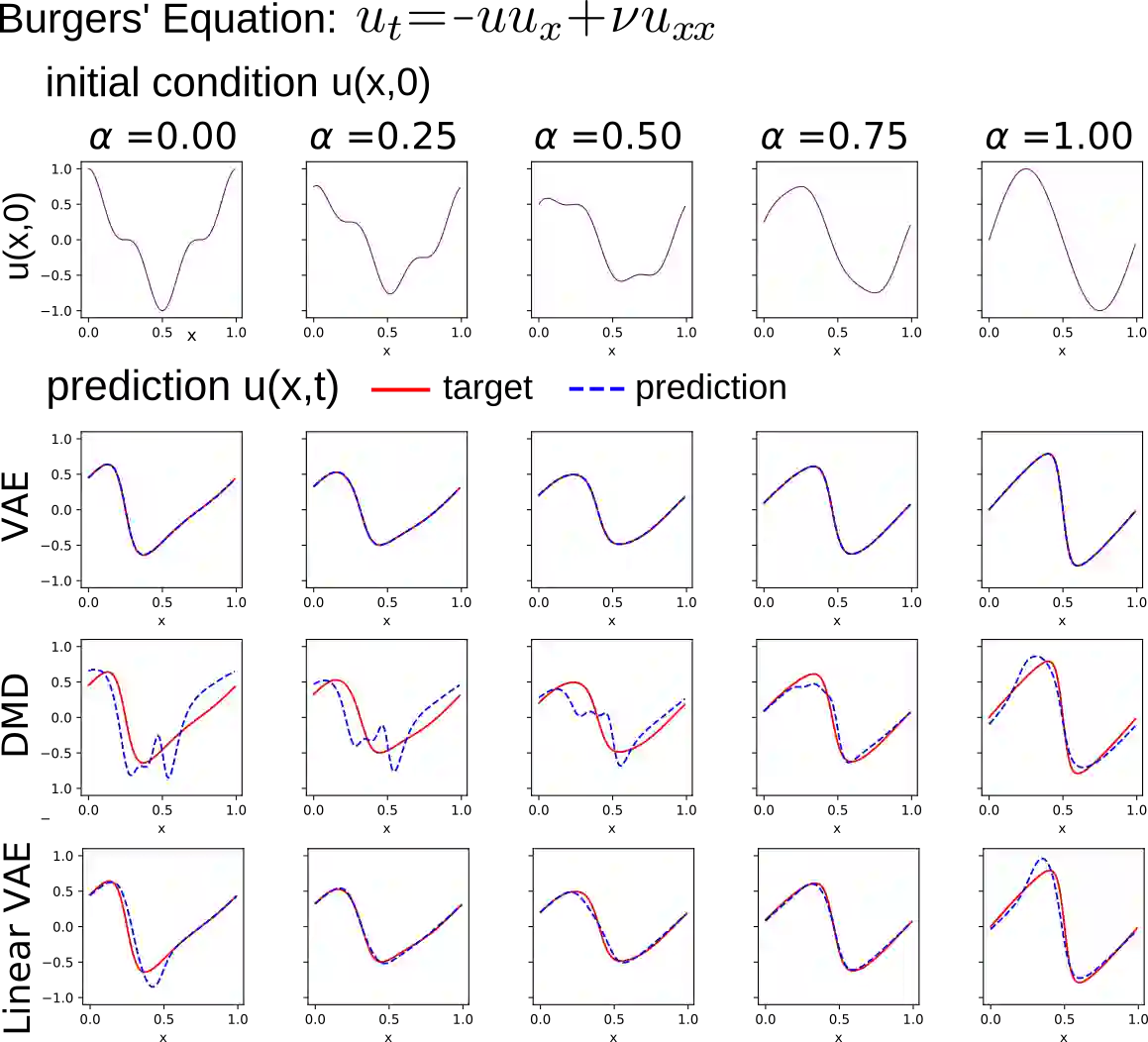
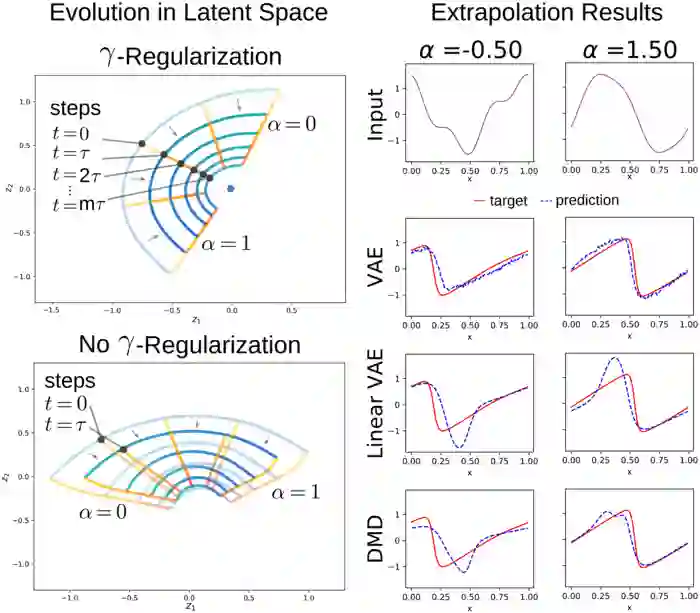
We develop data-driven methods incorporating geometric and topological information to learn parsimonious representations of nonlinear dynamics from observations. We develop approaches for learning nonlinear state space models of the dynamics for general manifold latent spaces using training strategies related to Variational Autoencoders (VAEs). Our methods are referred to as Geometric Dynamic (GD) Variational Autoencoders (GD-VAEs). We learn encoders and decoders for the system states and evolution based on deep neural network architectures that include general Multilayer Perceptrons (MLPs), Convolutional Neural Networks (CNNs), and Transpose CNNs (T-CNNs). Motivated by problems arising in parameterized PDEs and physics, we investigate the performance of our methods on tasks for learning low dimensional representations of the nonlinear Burgers equations, constrained mechanical systems, and spatial fields of reaction-diffusion systems. GD-VAEs provide methods for obtaining representations for use in learning tasks involving dynamics.
翻译:我们开发了数据驱动方法,纳入了几何和地形信息,以便从观测中了解非线性动态的模糊描述;我们开发了方法,利用与变异自动电解码器有关的培训战略,学习普通多极潜在空间动态的非线性国家空间模型;我们的方法被称为几何动态(GD)变异自动电解码器(GD-VAEs);我们学习了系统状态的编码器和解码器,以及基于深层神经网络结构的演进,这些结构包括一般多层倍感器(MLPs)、连动神经网络(CNNs)和T-CNNs(T-CNNs)等。受参数化PDEs和物理中出现问题的影响,我们调查了我们在学习非线性布尔格斯方程式、节制机械系统以及反应性扩散系统空间领域的低维度表达方法的绩效。GD-VAE提供了获取用于动态学习任务演示的方法。