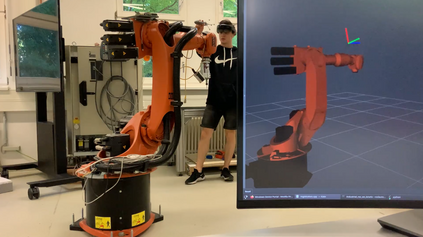
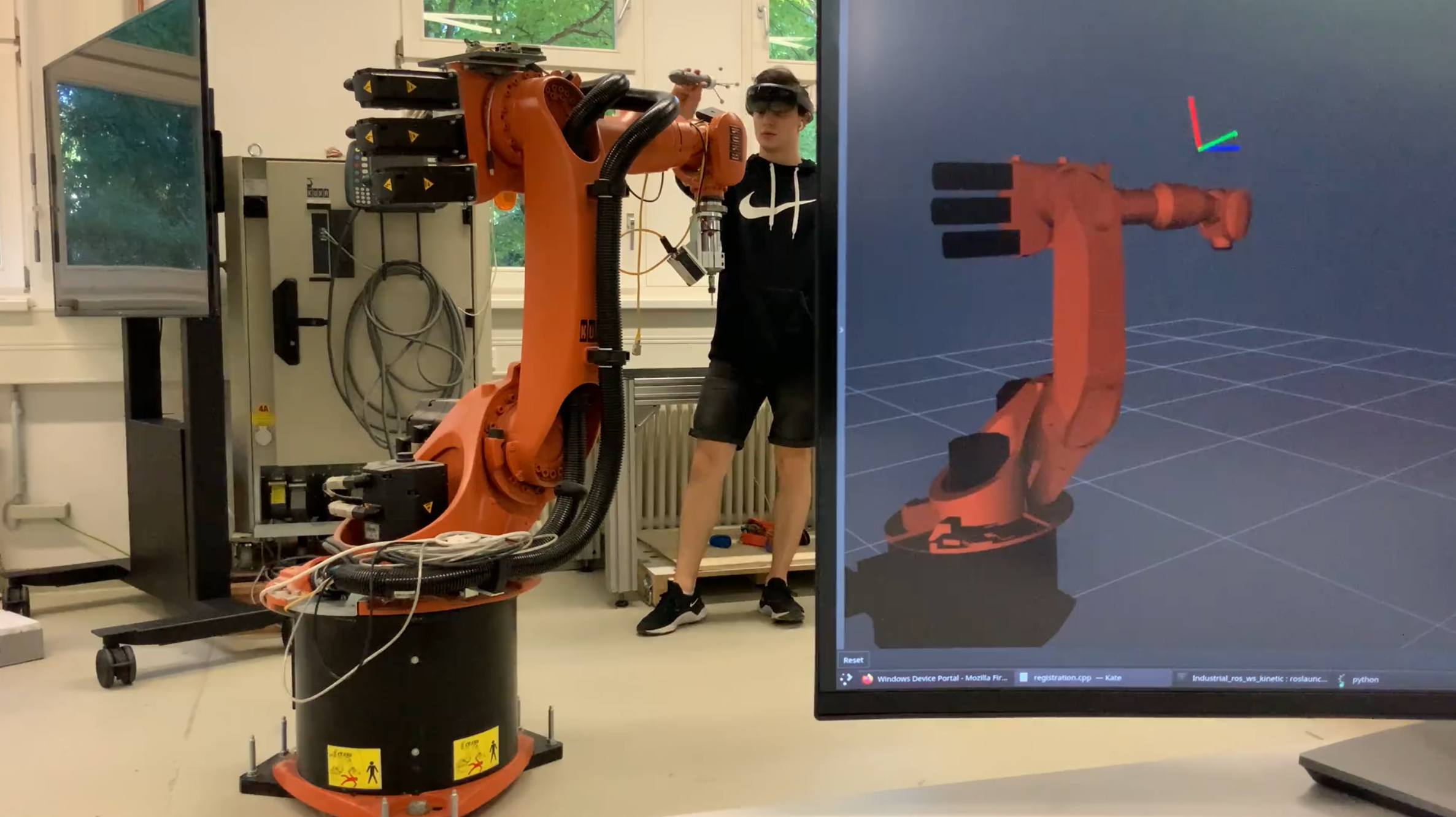
Intuitive robot programming through use of tracked smart input devices relies on fixed, external tracking systems, most often employing infra-red markers. Such an approach is frequently combined with projector-based augmented reality for better visualisation and interface. The combined system, although providing an intuitive programming platform with short cycle times even for inexperienced users, is immobile, expensive and requires extensive calibration. When faced with a changing environment and large number of robots it becomes sorely impractical. Here we present our work on infra-red marker tracking using the Microsoft HoloLens head-mounted display. The HoloLens can map the environment, register the robot on-line, and track smart devices equipped with infra-red markers in the robot coordinate system. We envision our work to provide the basis to transfer many of the paradigms developed over the years for systems requiring a projector and a tracked input device into a highly-portable system that does not require any calibration or special set-up. We test the quality of the marker-tracking in an industrial robot cell and compare our tracking with a ground truth obtained via an ART-3 tracking system.
翻译:通过跟踪智能输入设备进行直观的机器人编程依赖于固定的外部追踪系统,最常使用红外标记。这种方法常常与投影仪为基础的增强现实相结合,以获得更好的可视化和接口。组合系统虽然为无经验用户提供了短周期时间的直观编程平台,但却是不动、昂贵的并且需要大量校准。在面对多变的环境和大量机器人时,这种方法变得相当不实用。在这里,我们展示了使用微软HoloLens头戴式显示器的红外标记跟踪的工作原理。HoloLens可以映射环境,在线注册机器人,并在机器人坐标系中跟踪配备红外标记的智能设备。我们设想我们的工作将提供基础,将多年来为需要投影仪和跟踪输入设备的系统开发的许多范例转移到一个高度便携的系统,该系统不需要任何校准或特殊设置。我们在工业机器人单元中测试了标记跟踪的质量,并将我们的跟踪与通过ART-3跟踪系统获得的地面真相进行比较。