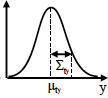
Human motion prediction is essential for tasks such as human motion analysis and human-robot interactions. Most existing approaches have been proposed to realize motion prediction. However, they ignore an important task, the evaluation of the quality of the predicted result. It is far more enough for current approaches in actual scenarios because people can't know how to interact with the machine without the evaluation of prediction, and unreliable predictions may mislead the machine to harm the human. Hence, we propose an uncertainty-aware framework for human motion prediction (UA-HMP). Concretely, we first design an uncertainty-aware predictor through Gaussian modeling to achieve the value and the uncertainty of predicted motion. Then, an uncertainty-guided learning scheme is proposed to quantitate the uncertainty and reduce the negative effect of the noisy samples during optimization for better performance. Our proposed framework is easily combined with current SOTA baselines to overcome their weakness in uncertainty modeling with slight parameters increment. Extensive experiments also show that they can achieve better performance in both short and long-term predictions in H3.6M, CMU-Mocap.
翻译:人类运动预测对于人类运动分析和人类-机器人相互作用等任务至关重要。 多数现有方法都建议实现运动预测。 但是,它们忽略了一项重要的任务,即对预测结果的质量进行评估。 这对于当前在实际情况下的做法来说就足够了,因为人们无法知道如何与机器互动,而不可靠的预测可能会误导机器伤害人类。 因此,我们提出了人类运动预测的不确定性意识框架(UA-HMP ) 。 具体地说,我们首先通过高斯模型设计一个不确定性觉悟预测器,以实现预测运动的价值和不确定性。 然后,提出了一种以不确定性为指南的学习计划,以量化不确定性,并在优化工作期间减少噪音样本的消极影响,提高性能。我们提出的框架很容易与目前的SOTA基线结合起来,以通过微量参数递增来克服其在不确定性模型中的弱点。 广泛的实验还表明,他们在H3.6M、CMU-M Cap的短期和长期预测中可以取得更好的表现。